Прежде чем перейти к особенностям управления энергоблоками при выдаче электроэнергии в сеть, рассмотрим вопросы производства и потребления электроэнергии в современных энергосистемах.
Принципиальным отличием энергетических блоков от многих других технологических объектов является невозможность «складирования» готовой продукции. Поэтому суммарное производство электрической энергии в энергосистеме в каждый момент должно равняться ее полному потреблению. При неравенстве производства и потребления происходит изменение частоты тока в системе, номинальное значение которой 50 Гц, при недостатке производимой мощности частота падает, при избытке— растет. Скорость изменения частоты зависит от общей мощности энергосистемы и характеристик потребителей мощности. Отклонения частоты допускаются в узких пределах (±0,2 Гц). Применяемые в энергоблоках электрические генераторы относятся к классу синхронных машин. Это означает, что частота их вращения всегда пропорциональна частоте сети (номинальная частота вращения современных генераторов 50 об/с = = 3000 об/мин или 25 об/с = = 1500 об/мин), поэтому в качестве сигнала соответствия производимой и потребляемой мощности можно использовать частоту вращения ротора генератора или турбины.
Вне зависимости от типа ядерной энергетической установки процесс производства электроэнергии энергоблоком может быть представлен схемой рис. 2.1.
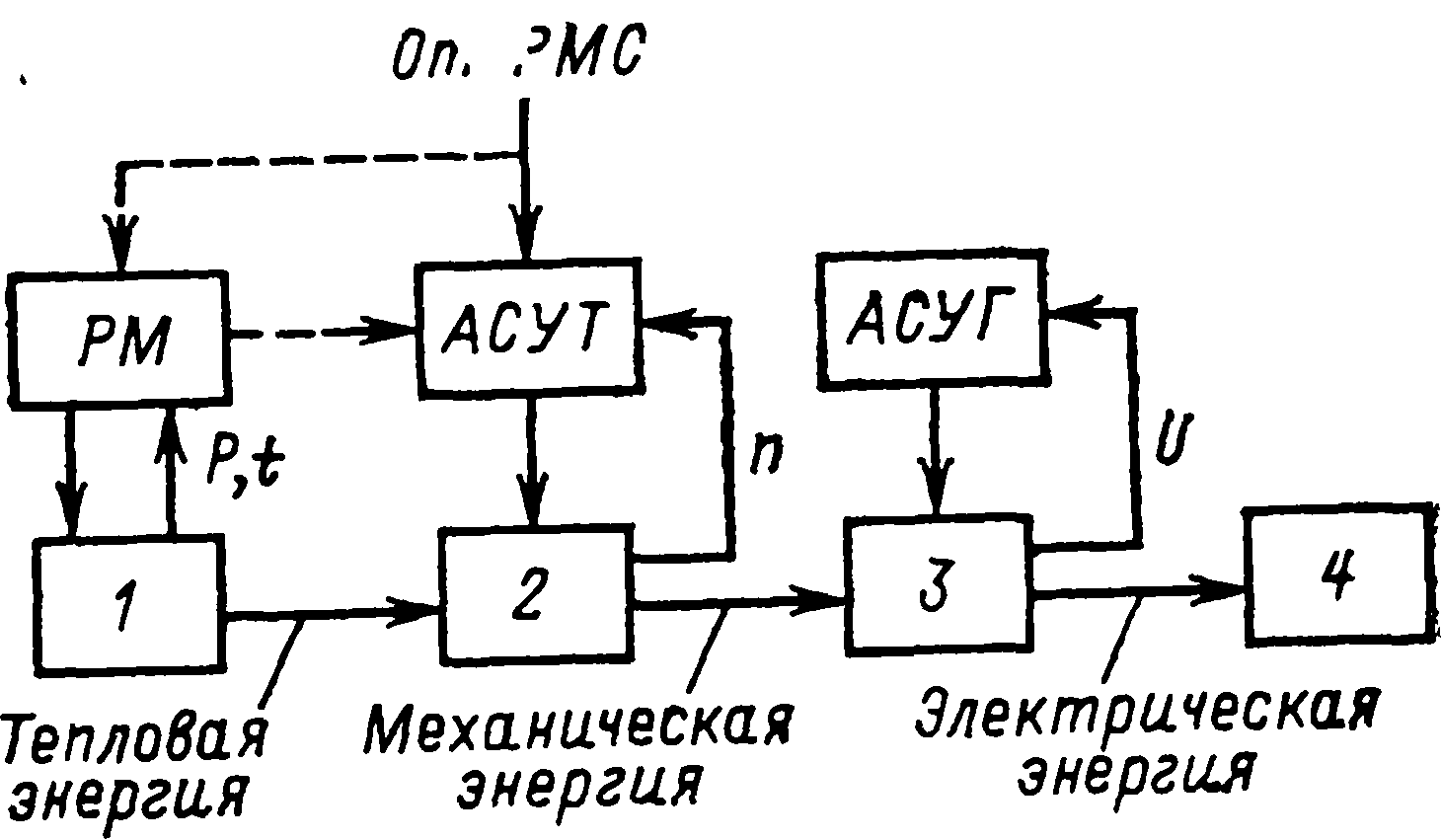
Рис. 2 1. Принципиальная блок-схема регулирования мощности ЯЭУ
Энергия ядерной реакции деления топлива превращается в ядерной паропроизводящей установке (ЯППУ) 1 в тепловую энергию насыщенного или перегретого пара*.
* В настоящем пособии не рассматриваются ЯЭУ, использующие в качестве рабочего тела газ
Энергия пара в турбине 2 превращается в механическую энергию вращения ее ротора, которая преобразуется в генераторе 3 в электрическую энергию, поступающую в сеть 4. Процессы в генераторе практически безынерционны, поэтому электрическую мощность, отдаваемую в сеть, можно считать равной (без учета потерь в генераторе) механической мощности ротора турбины. В то же время существует возможность небаланса между мощностью, производимой ЯППУ, и мощностью, потребляемой турбиной, что приводит к изменению давления пара Р и температуры теплоносителя t ЯППУ.
Мощность турбины зависит от давления пара перед регулирующими клапанами турбины Р и положения регулирующих клапанов турбины. Последнее устанавливается системой управления турбиной (АСУТ), основным импульсом для которой является частота вращения турбины я. На АСУТ может подаваться также импульс от регулятора мощности системы (РМС), который меняет заданную мощность всем подчиненным ему энергоблокам, входящим в энергосистему. В результате работы РМС суммарная мощность, производимая в системе, соответствует требованиям потребителей. Несоответствие между мощностью турбины и мощностью ЯППУ устраняется регулятором мощности блока РМ, воздействующим либо на мощность ЯППУ, либо на мощность турбины. В последнем случае РМС должен воздействовать на задание РМ. Для нормального функционирования блока также необходимо поддерживать в определенных пределах ряд внутренних теплотехнических параметров, что осуществляется вспомогательными регуляторами и другими устройствами управления.
Важную роль в обеспечении выдачи электроэнергии играют системы управления электрическими параметрами, в частности система управления генератором (АСУ Г); эти системы обслуживаются персоналом электроцеха и в настоящем пособии не рассматриваются.
Структура системы регулирования в значительной степени определяется графиком электрической нагрузки энергосистемы и энергоблока Суточный график нагрузки системы показан на рис 2 2. По оси абсцисс отложены часы суток, а по оси ординат — потребляемая системой мощность (в относительных единицах). Видно, что потребление энергии в системе неравномерно в течение суток. Наряду с ночным минимумом (от 2 до 6 ч) имеются утренний (от 7 до 12 ч) и вечерний (от 18 до 23 ч) максимумы. Для обеспечения производства электроэнергии в соответствии с изменениями нагрузок мощности энергоблоков также должны изменяться. Так как технико-экономические показатели различных типов станций неодинаковы, изменение их мощности в процессе покрытия графика нагрузок производится по-разному, чтобы обеспечить наиболее экономичную работу системы в целом.

Рис. 2.2 Типовой суточный график нагрузки европейской частя СССР и возможности его покрытия (на ближайшую перспективу):
1 — дальние электропередачи от мощных ГЭС и ТЭС с востока, 2 — базисные АЭС, 3 — полупиковые АЭС; 4 — полупиковые ТЭС и ТЭЦ; 5 — пиковые станции
Этого можно достичь, если блоки, имеющие меньшие издержки на топливо и эксплуатационные расходы, будут нести нагрузку, приближающуюся к максимальной, а разгружаться будут блоки с большими издержками. Атомные станции относятся к числу станций с большими капиталовложениями и относительно малой величиной топливной составляющей, и их целесообразно загружать возможно полнее. При распределении нагрузок необходимо также учитывать различные дополнительные ограничения, например, пропускную способность линий электропередачи или невозможность по техническим причинам -снизить мощность некоторых блоков на органическом топливе ниже 50—70% номинальной. Поэтому может потребоваться, например, снижение мощности АЭС, работающих в системе, при значительной мощности, вырабатываемой ТЭС, если мощность последних достигла минимально допустимого по техническим условиям уровня, а их остановка нежелательна. Техникоэкономические показатели АЭС различных типов также неодинаковы: так, при наличии в энергосистеме блоков с реакторами на быстрых и тепловых нейтронах раньше должны разгружаться реакторы на тепловых нейтронах.
Блоки, работающие большую часть времени с наибольшей возможной нагрузкой, называются базисными; блоки, работающие только часть времени для покрытия максимумов нагрузки, — пиковыми; блоки, работающие в промежуточном режиме, т. е. изменяющие свою мощность один или два раза в сутки по заданному графику, — полупиковыми. На рис. 2.2 показано распределение мощности различных источников в течение суток, которое планируется в европейской части СССР на ближайшую перспективу. Видно, что АЭС будут работать в основном в базисном режиме, причем часть станций будет разгружаться на 20—30% во время ночного минимума нагрузок. Необходимая скорость такого снижения невелика и составляет 0,3—0,5%/мин. По мере увеличения доли АЭС в энергосистемах требования к их маневренности (способности изменять мощность) будут, очевидно, возрастать.
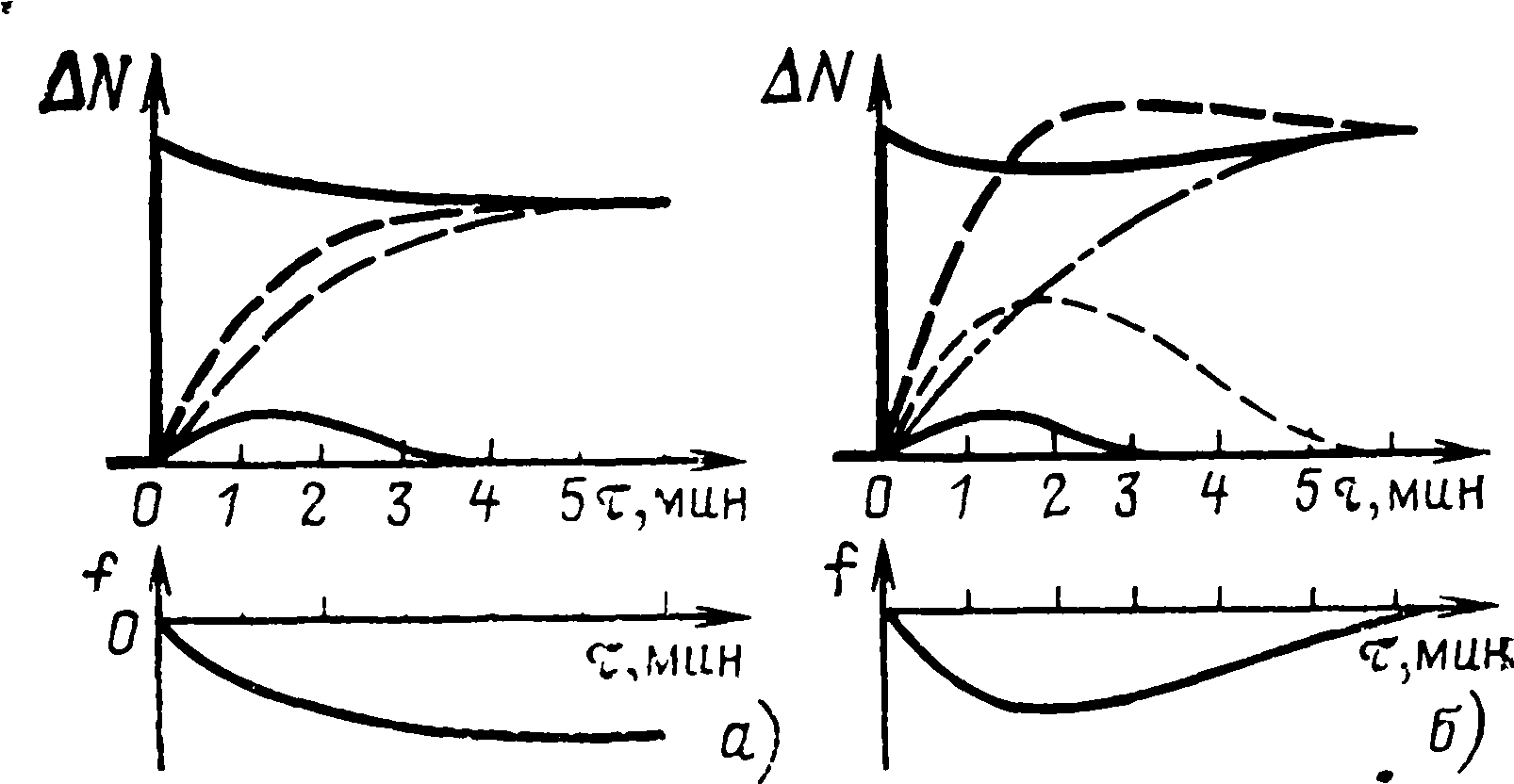
Рис. 2 3. Переходные процессы в энергосистеме при скачкообразном увеличении нагрузки: а — статическое регулирование; б — статическое и астатическое регулирование, — потребляемая мощность, мощность базисных блоков. мощность блоков статического регулирования, — мощность блоков астатического регулирования, суммарная производимая мощность
Показанная на рис. 2 2 зависимость мощности от времени является осредненной по многим суткам. В реальных условиях в энергосистеме могут происходить различные события (внезапное включение или отключение крупных потребителей, аварийное отключение линий электропередачи или энергоблоков), которые приводят к быстрым отклонениям потребляемой или производимой мощности от величины, заданной графиком нагрузки, и как следствие — к отклонению частоты тока в сети от номинального значения. Поэтому изменение мощности согласно ожидаемому графику нагрузок недостаточно, и необходимо постоянное регулирование частоты системы, т. е. относительно небольшое (до 5%), но быстрое (до 10%/мин) изменение производимой мощности в соответствии с реальной величиной ее потребления в данный момент.
В зависимости от степени участия энергоблоков в регулировании частоты различают три основных режима. У блоков, работающих в базисном режиме, производимая мощность не должна зависеть от отклонения частоты системы; при первичном (статическом) регулировании частоты мощность блока должна изменяться пропорционально отклонению частоты от номинальной (50 Гц); при вторичном (астатическом) регулировании мощность блока должна меняться до тех пор, пока частота не станет равной 50 Гц. Выбор режима работы зависит от технико-экономических показателей блока и системы в целом, а также от его маневренных свойств При этом каждый блок может работать в любом из перечисленных режимов. В каком режиме будет работать данный блок, определяется структурой его системы регулирования мощности. Укажем, что обычно системы управления блоками, работающими в базисном режиме, строятся таким образом, что при отклонении частоты от номинальной происходит временное (на 1—5 мин) изменение производимой ими мощности; это смягчает требования к маневренным свойствам регулирующих блоков.
На рис. 2.3 показаны, переходные процессы мощности N и частоты f энергосистемы, вызванные скачкообразным увеличением нагрузки в системе. Несоответствие мощностей приводит к уменьшению частоты, что вызывает рост производимой мощности. При наличии только статического регулирования (рис. 2.3, а) равновесие устанавливается на некотором неноминальном (сниженном) значении частоты; при астатическом регулировании происходит возвращение частоты к номинальному значению (рис. 2.3, б). Изменение мощности блоков статического регулирования пропорционально отклонению частоты. Мощность базисных блоков меняется только в момент резкого изменения частоты, а затем она, независимо от частоты, возвращается к прежнему значению. Снижение потребляемой в системе мощности (рис. 2.3, а) после скачка нагрузки вызвано уменьшением частоты, так как при этом происходит уменьшение частоты вращения и снижение мощности работающих в системе электродвигателей.
Статическое регулирование частоты осуществляется регулятором мощности блока, воспринимающим импульс отклонения частоты (частоты вращения турбины) и изменяющим мощность пропорционально этому отклонению (рис 2.1) Астатическое регулирование производится общим регулятором мощности системы РМС, который на основании сигнала отклонения частоты по технико-экономическим критериям определяет необходимое изменение мощности каждой из подчиненных ему станций, участвующих в астатическом регулировании, и посылает сигналы задания в АСУ ТП этих станций. АСУ ТП станции на основании данных о состоянии оборудования распределяет требуемое приращение мощности между блоками, исходя из минимизации себестоимости энергии станции, и посылает в АСУ ТП блоков сигналы задания, согласно которым происходит изменение действительной мощности. Функции РМС в настоящее время обычно выполняет ЭВМ АСУ энергосистемы.
При некоторых авариях в технологической схеме блока (отключение ГЦН) возникает необходимость разгрузить блок вне зависимости от требований системы. Для этого в системе управления блоком имеются специальные устройства, ограничивающие максимальную мощность в соответствии с реальным числом работающих агрегатов. Если требуемая сетью мощность блока меньше максимально допустимой, блок работает на этой мощности; в противном случае мощность снижается до допустимого уровня, выработку недостающей мощности по командам РМС берут на себя другие блоки системы.
Таким образом, можно сформулировать следующие задачи, системы управления энергоблоком
- поддержание мощности блока на заданном графиком уровне, который может быть как постоянным (базисный режим), так и медленно меняющимся (полупиковый режим);
- обеспечение регулирования частоты системы путем небольших отклонений мощности от заданного графиком уровня по закону, соответствующему выбранному режиму регулирования (базисному, статическому или астатическому);
- поддержание всех технологических параметров в заданных пределах при работе блока как в базисном, так и в регулирующем режиме,
- обеспечение разгрузки блока до допустимого уровня при авариях в отдельных агрегатах блока.
Технологическим критерием качества работы системы управления в рассматриваемых режимах является точность поддержания соответствия между требуемой и вырабатываемой мощностью при обеспечении минимума себестоимости электроэнергии. Для минимизации себестоимости УВС АСУ ТП должна определять оптимальные значения параметров, а также оптимальные варианты технологической схемы. Так, при снижении мощности блока в соответствии с требованиями сети целесообразно отключать часть ГЦН и других насосов. При неизменной технологической схеме задачи поддержания требуемой мощности и заданных значений технологических параметров осуществляются автоматическими системами регулирования. При больших изменениях мощности связанные с этим переключения в технологической схеме осуществляются оператором дистанционно, также используются устройства ФГУ и автоматические блокировки. При работе на мощности возможны аварийные отклонения параметров, поэтому устройства аварийной защиты должны находиться в состоянии готовности. Важную роль играют системы контроля параметров и предупредительной сигнализации, благодаря которым операторы могут своевременно получать информацию о нарушениях технологического режима и принимать меры к предотвращению аварийных ситуаций.