Как уже указывалось в предыдущем параграфе, наиболее распространены электромеханические приводы исполнительных органов реактора. Требования к ним предъявляются как назначением исполнительных органов (аварийные, компенсирующие, регулирующие), так и конструкцией реактора. В ряде случаев часть привода размещается в среде первого контура и подвержена воздействию высоких давлений и температур, достигающих 20 МПа и 230 °С, что заставляет идти на реализацию более сложных конструктивных решений, использование специальных конструкционных материалов.
В настоящем параграфе будут рассмотрены общие требования к приводам исполнительных органов реактора и конкретная реализация их для двух наиболее распространенных в нашей стране типов энергетического реактора — РБМК и ВВЭР.
Основные требования к приводам следующие:
максимальная скорость перемещения исполнительных органов должна быть выбрана такой, чтобы скоростная эффективность не превышала 0,07 р с-1;
должны быть обеспечены достаточные запасы по тяговому усилию, необходимые для обеспечения требуемой динамики перемещения исполнительных органов;
должна быть обеспечена достаточно высокая скорость введения поглощающего материала в активную зону реактора, необходимая для быстрого гашения цепной реакции;
для реакторов, у которых исполнительные органы разбиты на группы, должна быть обеспечена возможность управления приводами как в индивидуальном так и в групповом режимах, причем в последнем случае должна быть обеспечена синхронность перемещения приводов, объединенных в группы;
должна быть обеспечена индикация перемещения органов регулирования с заданной точностью. Эта точность зависит от значения положительной реактивности Ak{, при введении которой период разгона реактора станет равным уставке предварительной сигнализации аварийной защиты. Оператор должен иметь возможность оценить перемещение органов управления, приводящее к введению реактивности около 0,5 k1. Для реактора ВВЭР-440‘ это значение k1 = 0,001, соответствующее перемещение исполнительного органа составляет 12,5 мм, а максимальная погрешность при измерении этого перемещения не должна превышать ±5 мм;
должен быть обеспечен необходимый срок службы приводов и время непрерывной работы без обслуживания;
приводы должны быть работоспособны в тяжелых условиях окружающей среды;
конструкция привода должна обеспечивать безопасность работы, реактора, должно быть исключено» неуправляемое движение регулирующего органа вверх в случае любой неисправности устройств электропитания привода.

Рис. 6 6. Схема электромеханического привода винт — шариковая гайка:
а — привод регулирующих и компенсирующих органов реактора, б — верхняя часть привода аварийных органов реактора
Для органов управления первых отечественных реакторов типа ВВЭР, выполненных в виде топливных кассет с поглощающими насадками (масса 200—300 кг), применялся электромеханический привод винт—шариковая гайка с синхронным реактивным электродвигателем с частотным управлением (рис. 6.6,а). В случае подачи на статор этого электродвигателя напряжения постоянного тока электродвигатель развивает тормозной момент, удерживающий орган регулирования от движения вниз самоходом. Подача напряжения низкой частоты 0,5—1,0 Гц приводит к вращению ротора и, следовательно, перемещению органа регулирования. Реверс двигателя обеспечивается изменением чередования фаз. Статор 7 этого электродвигателя размещен в герметичной рубашке 19, изготовленной из немагнитной нержавеющей стали, а ротор 20 находится в среде первого контура.
Отвод тепла от статора привода осуществляется только естественной конвекцией с внешней стороны кожуха. Аналогичные решения реализованы и во всех более поздних конструкциях приводов с синхронными реактивными электродвигателями, что, конечно, возможно только при применении температуростойких электротехнических изоляционных материалов. Вращение от ротора электродвигателя 20 через карданное соединение 8 передается полому винту 11, по которому вертикально перемещается шариковая гайка 12. Наличие карданного соединения позволяет иметь свободную подвеску системы винт—гайка и, следовательно, облегчает операцию сцепления привода с головкой кассеты.
Шариковая гайка удерживается от вращения роликовыми упорами 13, движущимися в двух вертикальных направляющих 14. Корпус гайки соединяется со штангой 16, которая с помощью механизма сцепления байонетного типа 17 соединяется с головкой кассеты 18. Наличие разъемного соединения привода и органа регулирования—в данном случае топливной кассеты с поглощающей насадкой—обеспечивает технологию извлечения отработавших в реакторе кассет и загрузку свежих и позволяет повторно использовать привод органа управления в комплекте с новой топливной кассетой.
Верхний конец вала электродвигателя с помощью зубчатой муфты 6 соединяется с магнитной муфтой 5 сельсинного указателя положения. Между ведомой и ведущей частями магнитной муфты находится разделительный стакан 4, отделяющий полость первого контура от окружающего воздушного пространства. Таким образом редуктор 3 и сельсин 2 датчика положения 1 работают в воздухе, находясь вне среды первого контура.
Снаружи чехла укреплены магнитные датчики положения 9 и 15. Когда к этим датчикам подходит магнитный шунт 10, они дают сигнал на остановку привода (при движении вверх—датчик 9, при движении вниз—датчик 15).
На первых отечественных реакторах органы регулирования функционально разделялись. В связи с этим привод органа аварийной защиты несколько отличался конструктивно от привода органа регулирования. Нижняя его часть аналогична изображенной на рис. 6.6,а. В верхней части этого привода (рис. 6.6,6) размещается тарельчатый электромагнит аварийной защиты 19. При поступлении сигнала аварийной защиты катушки электромагнита 19 обесточиваются и под действием силы тяжести якорь электромагнита 21 вместе со штангой 16 и кассетой падает. При падении механизм расцепления 20 якоря электромагнита 21 со штангой натыкается на клин (на рисунке не показан), установленный выше электродвигателя 7, и расцепляет якорь 21 и штангу 16. Штанга вместе с кассетой падает в крайнее нижнее положение, а якорь электромагнита пружиной 22 (возвращается в исходное положение. Приводы органов регулирования при поступлении сигнала аварийной защиты обесточиваются и под действием силы тяжести идут самоходом вниз.
Дальнейшее развитие этого типа привода—замена кинематической пары винт—гайка парой рейка—реечная шестерня. Такой привод был применен на третьем блоке Нововоронежской АЭС. Реактор этого блока имеет уже универсальные органы управления, поэтому все они оснащены однотипным приводом с синхронным реактивным электродвигателем РД-42-4Р погружного типа с частотным управлением. Этот электродвигатель практически ничем не отличается от электродвигателя, использованного в приводе типа винт—гайка.

Рис. 6 7 Схема электромеханического привода рейка — реечная шестерня
Схема «реечного» привода изображена на рис. 6.7. Вращение от электродвигателя 7 через редуктор 6 с цилиндрическими и коническими шестернями передается реечной шестерне 5. При включенном электромагните 4 механизм сцепления рейки с реечной шестерней вводит последнюю в зацепление с рейкой 8. Этот механизм, условно вынесенный за пределы привода на рис. 6.7, состоит из стакана 12, шарнирно соединенного с реечной шестерней.
К рейке жестко крепится штанга 9. На конце штанги имеется механизм сцепления байонетного типа 10, который входит в зацепление с головкой кассеты 11. В том случае, когда привод обеспечивает перемещение органов управления вверх или вниз с рабочей скоростью или его стоянку, реечная шестерня и рейка сцеплены. При поступлении сигнала аварийной защиты электромагнит обесточивается, реечная шестерня выходит из зацепления с рейкой.

Рис. 6 8 Схема электромеханического привода рейка — реечная шестерня (усовершенствованный вариант)
Освобожденная рейка вместе с органом управления свободно падает под действием силы тяжести. В этом типе привода применен линейный датчик указателя положения 1, состоящий из катушек трансформаторов 3 и магнитного шунта 2, размещенного на рейке. Когда шунт входит внутрь этих катушек, меняется потокосцепление между обмотками. Это изменение фиксируется электронными устройствами, формирующими сигнал положения органа регулирования, который передается на индикаторы, размещаемые на пульте оператора. В линейном датчике указателя положения также вмонтированы датчики путевых и конечных выключателей, работающих по тому же принципу, что и линейный указатель положения.
На рис. 6.8 представлена схема усовершенствованного привода. Уменьшение передаточного отношения редуктора обеспечило движение органа управления вниз самоходом при обесточивании Это позволило отказаться от механизма расцепления рейки с реечной шестерней, исключив из конструкции наименее надежный элемент, но потребовало увеличения момента на валу электродвигателя.
Электродвигатель перемещен в верхнюю часть привода, а перемещение шунта линейного указателя положения сделано меньше перемещения органа регулирования, что сократило общую длину привода.
В приводе применен синхронный реактивный электродвигатель 6 типа РД-42-4. Сверху электродвигателя устанавливается датчик указателя положения У, состоящий на трансформаторно связанных катушек 2 и шунта 3, установленного на шариковой гайке 4. Всего катушек 12: две для конечных выключателей, а остальные—для формирования сигналов прохождения механизмов промежуточных зон. Ходовой винт 7 датчика указателя положения связан с валом электродвигателя через муфту ограничения момента 5.
Таким образом, если в результате износа шариков в гайке они разместятся неравномерно, что приведет к заклиниванию механизма указателя положения, то привод не выйдет из строя в результате срабатывания этой муфты Статор электродвигателя 6 расположен в герметичном кожухе 12, а ротор 13 находится в среде первого контура. Его полый вал через редуктор 8 передает вращение на реечную шестерню 10, связанную с рейкой 9. К рейке жестко прикреплена штанга, сцепленная с головкой кассеты 11.
Для перемещения органов регулирования сравнительно малой массы (до 60 кг) применяется линейный шаговый привод.

Рис 6 9 Линейный шаговый электродвигатель
Этот привод обеспечивает удержание якоря и связанного с ним регулирующего органа в фиксированных положениях, дискретное перемещение регулирующего органа шагами определенной длины, а также сброс регулирующего органа при поступлении сигнала аварийной защиты.
Основные преимущества привода — это отсутствие в нем механических передач типа винт—гайка, рейка—реечная шестерня. Связь якоря со статором осуществляется только силами электромагнитного поля, создаваемого обмотками управления. Привод, так же как и привод с синхронным реактивным двигателем, допускает возможность электрического регулирования скорости перемещения наполнительного органа путем изменения частоты следования импульсов напряжения витания, подаваемого на обмотки управления двигателя.
Статор линейного шагового двигателя (рис. 6.9) представляет собой тонкостенный кожух 1, в зоне каждой из четырех фаз которого вварены магнитные полюсы. На полюсах установлены 0-образные катушки 2, причем каждая фаза образована четырьмя катушками. Снаружи полюсов установлены кольцевые магнитопроводы. Якорь двигателя 3, одновременно являющийся подвижным элементом привода, представляет собой трубчатую конструкцию со сквозными поперечными пазами, которые образуют зубцовую зону магнитопровода. Внутри якоря размещается сердечник 4 В верхней части якоря расположены направляющие подшипники, а в нижней—захват байонетного типа с шариковой защелкой 5.
Линейный шаговый двигатель представляет собой четырехфазную электрическую машину с пассивным якорем трубчатой формы Катушки в каждой фазе соединены последовательно Возбуждение катушек производится однополярными импульсами напряжения, подаваемыми в определенной последовательности. Магнитный поток направлен перпендикулярно продольной оси якоря и замыкается через внутренний сердечник и кольцевой наружный магнитопровод. Каждый полюсный наконечник сдвинут относительно предыдущего на расстояние, равное одному шагу привода, по отношению к зубцам якоря (рис. 6.10). Коммутация фаз в режиме движения осуществляется «попарно. Реверс двигателя обеспечивается изменением порядка коммутации фаз Для движения вверх реализуется последовательность I-II, II-III, III- IV, IV-I, а для движения вниз I-II, IV-I, III-IV, II-III. В режиме фиксированного удержания якоря постоянное напряжение подается на любую пару фаз.
Как видно из рис. 6.10, при подаче напряжения на катушки 4 магнитов фаз I и II магнитное сопротивление фазы 1 будет минимальным (зубцы 3 якоря 2 совпадают с полюсом магнита 1) и якорь 2 будет удерживаться в этом положении. Магнитный поток при этом замыкается через полюс 1, сердечник 6 и кольцевой магнитопровод 5.

Рис 6 10 Принцип действия линейного шагового электродвигателя
При подаче напряжения на фазы II и III зубец якоря оказывается сдвинутым относительно полюса магнита фазы II на величину шага. Якорь втягивается на эту величину. При дальнейшем чередовании фаз процесс повторяется.
Датчик положения по принципу действия аналогичен описанному выше датчику положения реечного привода с синхронным реактивным электродвигателем. Блок катушек этого датчика размещается внутри герметичного корпуса, являющегося основной несущей конструкцией датчика, и расположен во внутренней полости якоря.
Рассмотрим теперь приводы, используемые на реакторе типа РБМК. В этом типе реактора применяются стержни-поглотители для автоматического регулирования мощности (АР), компенсации реактивности (ручного регулирования) и аварийной защиты (PP-АЗ), выравнивания энерговыделения по высоте активной зоны (УСП).
Наибольший интерес представляет механизм компенсации реактивности (ручного регулирования) и PP-АЗ, кинематическая схема которого приведена на рис. 6.11.
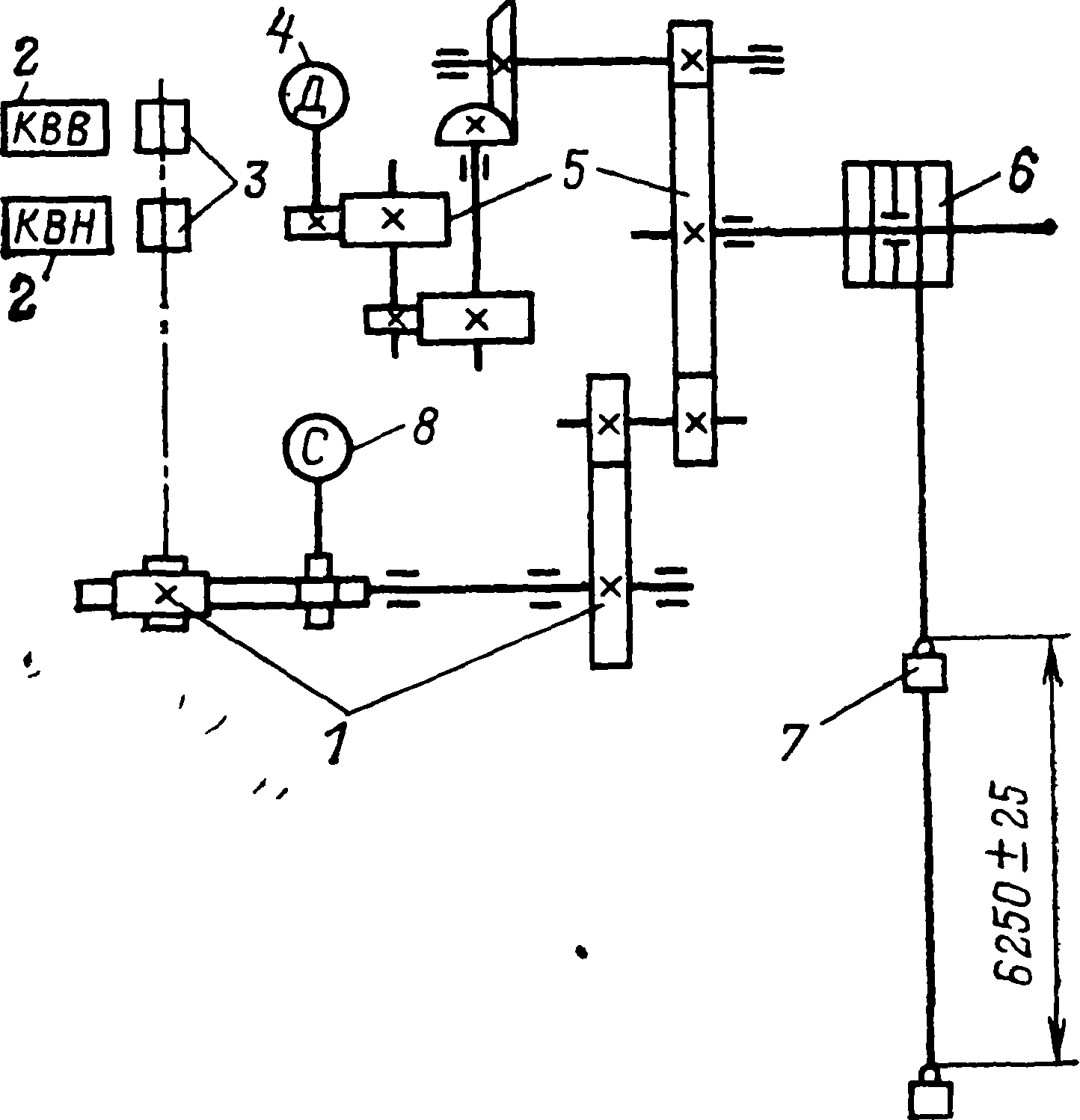
Рис 611 Кинематическая схема привода PP-АЗ реактора РБМК
Электродвигатель постоянного тока 4, имеющий встроенную электромагнитную муфту, тормозящую его вал при подаче напряжения, через передачу 5 передает вращение на барабан 6, на который наматывается трос или стальная лента, связанные со стержнем-поглотителем 7. Через кинематическую передачу 1 вращение передается сельсину-датчику 8 и кулачкам 3, воздействующим на микровыключатели 2 крайнего верхнего и нижнего положений стержня.
При отсутствии команд на движение цепи якоря и обмотки возбуждения электродвигателя обесточены, напряжение подается на обмотки электромагнитной муфты, барабан с тросом и стержнем заторможен. При подаче команды на извлечение стержня напряжение с муфты снимается, барабан растормаживается и электродвигатель, на который в этот момент подается напряжение, получает возможность извлечь стержень. Движение продолжается до момента срабатывания верхнего концевого микровыключателя.
При подаче сигнала АЗ электромагнитная муфта обесточивается, и привод под действием силы тяжести стержня начинает работать на опускание в режиме динамического торможения с самовозбуждением.
Введение стрежня в активную зону может происходить и с подачей импульсов напряжения в цепь якоря для уменьшения времени переходного процесса. В этом случае подается полное напряжение в цепь якоря и на обмотку возбуждения, снимается питание с элекгромагнитной муфты. Привод начинает работать на опускание в двигательном режиме. Затем снимается питание с обмотки якоря, привод начинает работать на опускание в режиме динамического торможения под действием силы тяжести стержня.
Возможно опускание привода и в другом режиме, когда напряжение питания подается только на обмотку возбуждения. Муфта обесточивается, и привод под действием силы тяжести стержня начинает работать на опускание в режиме динамического торможения с ослабленным потоком.
Управление приводами исполнительных органов различного типа может осуществляться как автоматически, так и дистанционно вручную с пульта оператора. Так, аварийные исполнительные органы срабатывают автоматически при поступлении аварийных сигналов по нейтронно-физическим или теплотехническим параметрам. На пульте оператора, кроме того, установлены две кнопки аварийной защиты, нажатием любой из которых можно вызвать срабатывание защиты. Приводы регулирующих и компенсирующих исполнительных органов могут управляться по сигналам от регулятора мощности реактора или оператором с помощью ключей, установленных на пульте в помещении блочного щита управления. В случае универсальных исполнительных органов все упомянутые выше решения сохраняются.