ГЛАВА ОДИННАДЦАТАЯ ДИСТАНЦИОННОЕ И
ФУНКЦИОНАЛЬНО-ГРУППОВОЕ УПРАВЛЕНИЕ
- ОБЩАЯ ХАРАКТЕРИСТИКА СХЕМ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМ ОБОРУДОВАНИЕМ АЭС
Передача управляющих воздействий от операторов или автоматических устройств в технологическую схему объекта производится путем изменения состояния механизмов собственных нужд, управляющих электронагревателей, запорных и регулирующих органов.
К механизмам собственных нужд относятся электроприводы насосов и вентиляторов. Управляющие электронагреватели применяются, как указывалось в гл. 8, для поддержаний давления в первом контуре реакторов ВВЭР и для регулирования температуры натриевых контуров реакторов БН. Как электроприводы механизмов собственных нужд, так и электрические нагреватели могут иметь два состояния — «включено», «выключено»; управление двигателями с регулируемым числом оборотов (см. гл. 8) в настоящей главе не рассматривается.
Запорные органы (задвижки) предназначены для полного перекрытия потока жидкости или газа по трубопроводам и, как правило, могут находиться в одном из крайних положений — «открыто», «закрыто». Регулирующие органы предназначены для изменения расхода жидкости или газа путем его дросселирования (см. гл. 8); они могут находиться в любом промежуточном положении. Некоторые задвижки также допускают работу в промежуточных положениях и могут одновременно работать как запорные и как регулирующие органы (многопозиционные задвижки). Запорные и регулирующие органы АЭС, как правило, оснащаются электроприводами. Отдельные, редко управляемые органы имеют только ручное управление по месту (примером могут служить клапаны регулирования расходов в технологических каналах реактора РБМК, изменение положения которых производится не чаще одного-двух раз в год). Некоторые органы имеют пневматические или гидравлические приводы, однако общая доля их мала (не более 1 %) Кроме того, передача воздействий к ним от оператора осуществляется электрическими сигналами. Поэтому в данной главе рассматриваются только электрические схемы управления.
Электроприводы механизмов собственных нужд имеют большую мощность (до 3—5 МВт) Мощность электроприводов запорных и регулирующих органов значительно меньше, но и она может достигать 10—20 кВт. Для управления двигателями требуются большие токи и напряжения. Поэтому на пультах и щитах оператора не производится коммутация цепей, по которым ток поступает в двигатели (первичная коммутация), а переключаются только сигналы (вторичная коммутация), управляющие силовой аппаратурой первичной коммутации. При этом силовая аппаратура первичной коммутации располагается по месту в непосредственной близости от управляемого привода и соединяется с ним сильноточным кабелем. Связь пультов и щитов с аппаратурой вторичной коммутации осуществляется слаботочными кабелями, рассчитываемыми на меньшие токи и в ряде случаев на меньшее напряжение, чем силовые кабели. Такое разделение цепей первичной и вторичной коммутации уменьшает расход дорогого силового кабеля; уменьшает, габариты аппаратуры, устанавливаемой на пультах и щитах; облегчает выполнение требований техники безопасности в БЩУ; упрощает построение логических схем блокировок и защит электропривода.
Для передачи управляющих воздействий на пульте (щите) располагаются аппараты управления (ключи и кнопки управления, переключатели и т д). Выбор конкретного типа аппарата зависит от алгоритма управления данным приводом, количества коммутируемых линий, общей компоновки пультов и т. п. На рис. 11.1 показаны блок-схемы управления приводами. Схема рис. 11.1,а соответствует индивидуальному управлению, когда каждый привод имеет свой аппарат управления 7, размещаемый в оперативном помещении щита управления.
Сигнал от аппарата управления поступает в логические схемы 2, где определяется допустимость включения (выключения), вводятся сигналы от устройств блокировок, вырабатывается необходимая последовательность и длительность управляющих сигналов и т. д. Логические схемы обычно размещаются в шкафах релейной аппаратуры, находящихся в неоперативных помещениях БЩУ. Сигнал релейных схем поступает к устройствам первичной коммутации 3, которые подают напряжение по силовому кабелю к приводу 4. Оператор осуществляет контроль состояния привода с помощью сигнального устройства 5 (сигнальные лампы, указатели положения). В сложных схемах управления (управление мощными насосами) на сигнальном устройстве может контролироваться и состояние схем 2, а также силовой аппаратуры 3.

Рис 11. 1. Блок-схемы дистанционного управления
а — индивидуальное, б — вызывное, в — групповое, АЗ и Б — аварийные защиты и блокировки
Для сокращения площади оперативных пультов БЩУ на современных АЭС широко применяется вызывное управление (рис. 11.1,б).
Для осуществления такого управления схема имеет вызывное устройство 6, с помощью которого можно подключить к аппарату любой из закрепленных за ним приводов. Вызывное устройство может быть предметным и адресным (рис. 11.2). В первом случае каждому приводу соответствует своя кнопка (клавиша), при нажатии которой осуществляется подключение привода к командному аппарату (рис. 11.2,а). На клавише может иметься надпись, поясняющая номер и назначение данного привода. При адресном вызове каждому приводу присваивается двух- или трехзначный номер, который набирается на номеронабирателе (рис. 11.2,б).
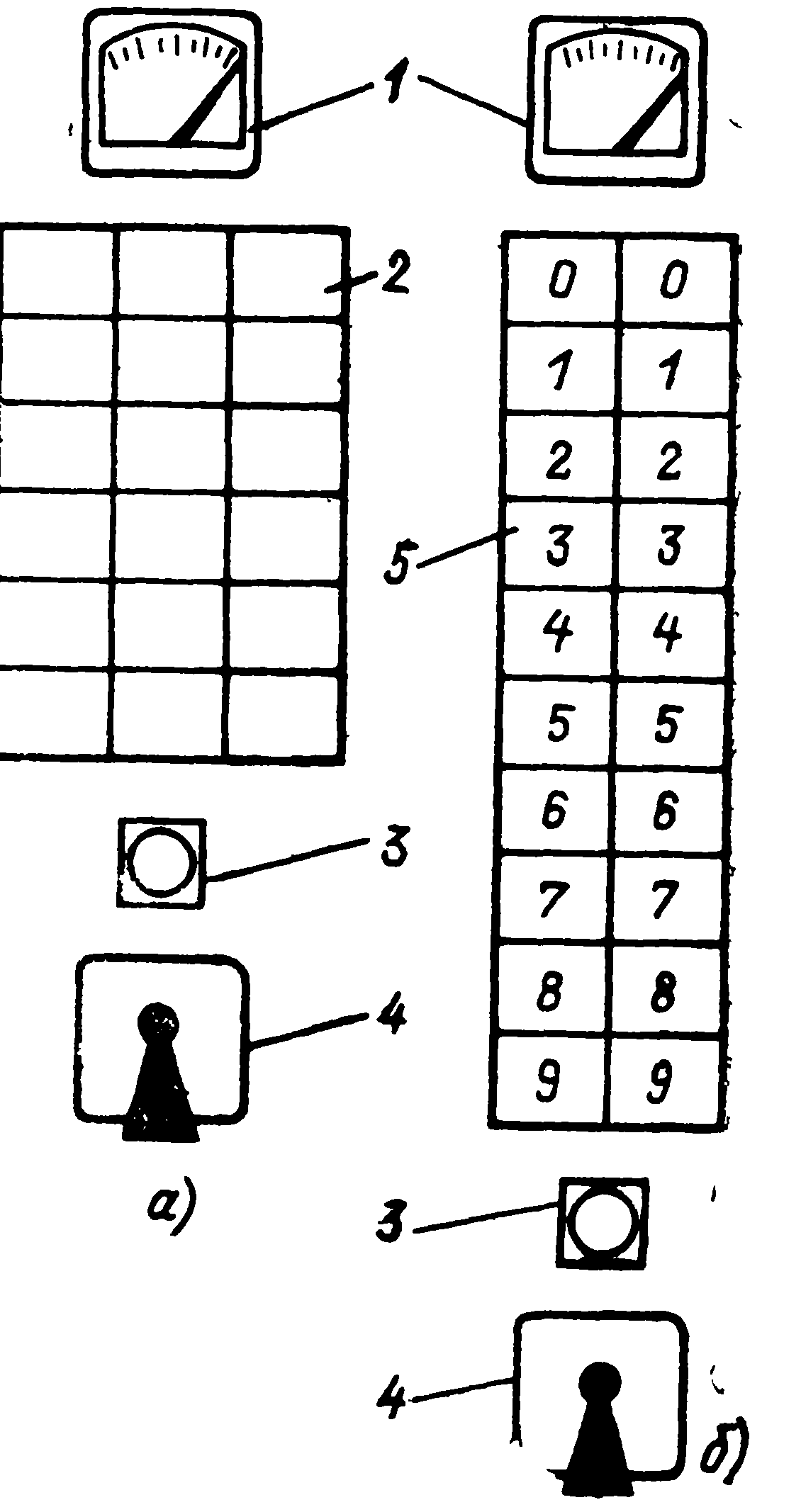
Рис 11 2 Командные аппараты вызывного управления
а — предметное (на 18 приводов), б — адресное (двухразрядное), 1 — указатель положения, 2 — клавиши предметного вызова, 3 — кнопка «стоп» для остановки задвижек в промежуточном положении, 4 — ключ управления, 5 — кнопки номеронабирателя
Очевидно, что при том же габарите вызывного устройства при адресном вызове за ним можно закрепить больше приводов, чем при предметном, но адресный вызов менее удобен, так как требует запоминания адресов управляемых приводов. Сигнал с вызывного устройства 6 (рис. 11.1,6) поступает в логические схемы выбора 7, которые направляют сигнал аппарата 1 к нужному приводу 4. Факт вызова данного устройства индицируется на мнемосхеме зажиганием специальных символов. Если вызываемый привод управляет регулирующим органом, то в момент вызова он подключается к указателю положения 1 (рис. 11.2). Состояние приводов (включено — выключено, открыто— закрыто) обычно контролируется на сигнальных устройствах 5 (рис. 11.1) вне зависимости от того, вызван данный привод или нет. Поскольку вызывное управление применяется для приводов малой и средней мощности с относительно простой логикой управления, состояние релейных схем и силовых устройств обычно не сигнализируется.
Если управление несколькими приводами во всех технологических режимах подчиняется жесткой логике, они могут быть объединены в группу, управляемую одним командным аппаратом 1 (рис. 11.1, в), сигнал от которого поступает в схему 2, обеспечивающую управление подчиненными ей приводами в требуемой последовательности по заданному алгоритму. Для правильного функционирования схемы 2 в нее вводятся сигналы обратной связи от подчиненных ей приводов и их силовых устройств. Контроль правильности работы группового управления, состояния силовых устройств и приводов осуществляется по сигнальному устройству 5. Если группа приводов должна управляться по сложным алгоритмам с учетом действительных значений технологических параметров, использованием временных программ и т. д., то для управления применяются схемы, включающие разветвленную логику, автоматические регуляторы и т. д. Такие схемы получили название устройств функционально-группового управления (ФГУ) (см. § 11.5).
Для повышения надежности все схемы управления электроприводами должны удовлетворять определенным общим требованиям. Действия, которые должен производить оператор, должны быть простыми, исключающими ошибочные включения и отключения. Должна быть обеспечена световая сигнализация состояния привода включен — отключен, открыто — закрыто и т. д., а для приводов с вызывным управлением — световая сигнализация вызова. Сигнализация положения не должна зависеть от того, подается или не подается в данный момент команда управления. Должна быть обеспечена светозвуковая сигнализация автоматических включений и отключений объекта, а также светозвуковая сигнализация неисправностей самой схемы управления. Звуковые сигналы для этих видов сигнализации должны быть разного тона.
Необходимо обеспечить надежное питание схем управления оперативным током, которое должно сохраняться при потере силового напряжения электроприводов. С другой стороны, потеря напряжения в цепях управления механизма собственных нужд не должна приводить к его отключению. Для запорных и регулирующих органов, у которых мощность двигателя не превышает нескольких киловатт, питание схем управления может осуществляться непосредственно от источника силового напряжения электроприводов, при этом должны сохраняться высокие требования к бесперебойности этого питания (см. гл. 13).
Для защиты цепей управления должны использоваться автоматические выключатели, обеспечивающие сигнализацию отключения и оперативное повторное включение. Применение плавких предохранителей не допускается.