ГЛАВА ВОСЬМАЯ
АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ АГРЕГАТОВ АЭС
ОБЩИЕ ПОЛОЖЕНИЯ
Технологические схемы современных АЭС отличаются значительным разнообразием. Соответственно различны и их схемы регулирования. Однако во многих схемах можно выделить агрегаты, выполняющие сходные технологические задачи, принципы управления которыми также близки. Поэтому прежде чем перейти к рассмотрению схем регулирования энергоблоков (гл. 9), рассмотрим принципы автоматического регулирования агрегатов, общих для различных схем энергоблоков.
Общими для различных блоков являются также методы организации управляющих воздействий на объект. Для всех агрегатов энергоблоков (кроме реакторов, управляющие воздействия которых рассмотрены в гл. 6) управляющие воздействия осуществляются изменением притока энергии или изменением притока (стока) вещества.
Изменение притока энергии применяется редко, обычно там, где в технологической схеме имеются электронагреватели (компенсаторы объема, электрообогрев натриевых контуров), и производится изменением напряжения или, чаще, включением или отключением электронагревателей
Изменение притока (стока) вещества является наиболее распространенным способом реализации 132 управляющих воздействий. Оно может осуществляться либо перемещением дроссельных регулирующих органов (см. § 8.2), либо изменением производительности насосов, перекачивающих соответствующие вещества (см § 8 3).

Рис. 8.10. К расчету характеристик параллельна работающих насосов: а — схема включения насосов 1 — регулирующий клапан, б — гидравлические характеристики 1 — одного насоса; 2 —двух насосов: 3—трех насосов; 4 — трубопровода; 5 — трубопровода вместе с клапаном
РЕГУЛИРОВАНИЕ ПОДАЧИ НАСОСОВ
Регулирование подачи насосов производится путем изменения числа параллельно работающих насосов, частоты вращения насосов, положения направляющего аппарата.
Регулирование подачи ГЦН наиболее распространенных энергетических реакторов ВВЭР и РБМК осуществляется изменением числа параллельно работающих насосов. При этом расход воды через реактор меняется ступенчато и приблизительно пропорционален числу включенных насосов. В реакторах на быстрых нейтронах (БН-600, БОР-60) применяется регулирование изменением частоты вращения ГЦН. Изменение положения направляющего аппарата используется в реакторах с газовым теплоносителем. Дроссельные органы для регулирования расхода теплоносителя через реактор не применяются.
Регулирование подачи циркуляционных насосов, подающих охлаждающую воду в конденсаторы турбин, осуществляется изменением числа работающих насосов.
Наиболее высокие требования предъявляются к регулированию подачи питательных насосов, подающих воду в парогенераторы или (при одноконтурной схеме) непосредственно в реактор. Наиболее распространенным способом является сочетание перемещения дроссельных органов и изменения частоты вращения насосов. При параллельной работе нескольких питательных насосов на сниженных нагрузках возможно также регулирование отключением части насосов.
Рассмотрим регулирование расхода изменением числа параллельно работающих насосов. На рис. 8.10,а показана схема включения трех параллельно работающих насосов, подающих жидкость в емкость с постоянным давлением -Р2. На общей линии за насосами установлен регулирующий клапан 1. Характеристика одного насоса показана на рис. 8.10,б (кривая 1). Характеристика двух (кривая 2) или трех (кривая 3) параллельно работающих насосов может быть легко построена, если известна характеристика одного насоса. Если один насос развивает давление Р при расходе G, то п параллельно работающих насосов развивают то же давление Р при расходе nG (или, в относительных единицах, ng, рис. 8.10,6). Для определения расхода, который установится через клапан при его полном открытии, построим характеристики трубопровода 4 и трубопровода вместе с клапаном 5.
Пересечение этих характеристик с линиями 1, 2 и 3 определяет значения расхода (g=0,38; 0,71 и 1,00 при одном, двух и трех насосах). Для установления промежуточных значений расхода необходимо прикрывать клапан, увеличивая перепад на нем. Например, для того чтобы получить g=0,8, необходима работа трех насосов и перепад составит Ркл (открытие клапана при этом h/hM=0,5). Расход g=0,6 можно получить как при трех работающих насосах (перепад Р"КЛ, h/hM^=ft,3), так и при двух (перепад АР'"Кл, h/hM=0,4). Таким образом, при двух насосах перепад на клапане меньше, а его открытие больше. Кроме того, при отключении насосов экономится электроэнергия. Однако при малых расходах (g<Z <0,2) перепад на клапане практически не Зависит от числа включенных насосов и клапан должен работать при очень малой степени открытия.
Более широкие возможности для регулирования обеспечивает изменение частоты вращения насосов. Если известна характеристика насоса при номинальной частоте вращения нн [она приближенно определяется уравнением (8.17)], то при произвольной частоте н<нн получим
![]() (8.19)
(8.19)
где g — отнесенный к номинальному относительный расход.
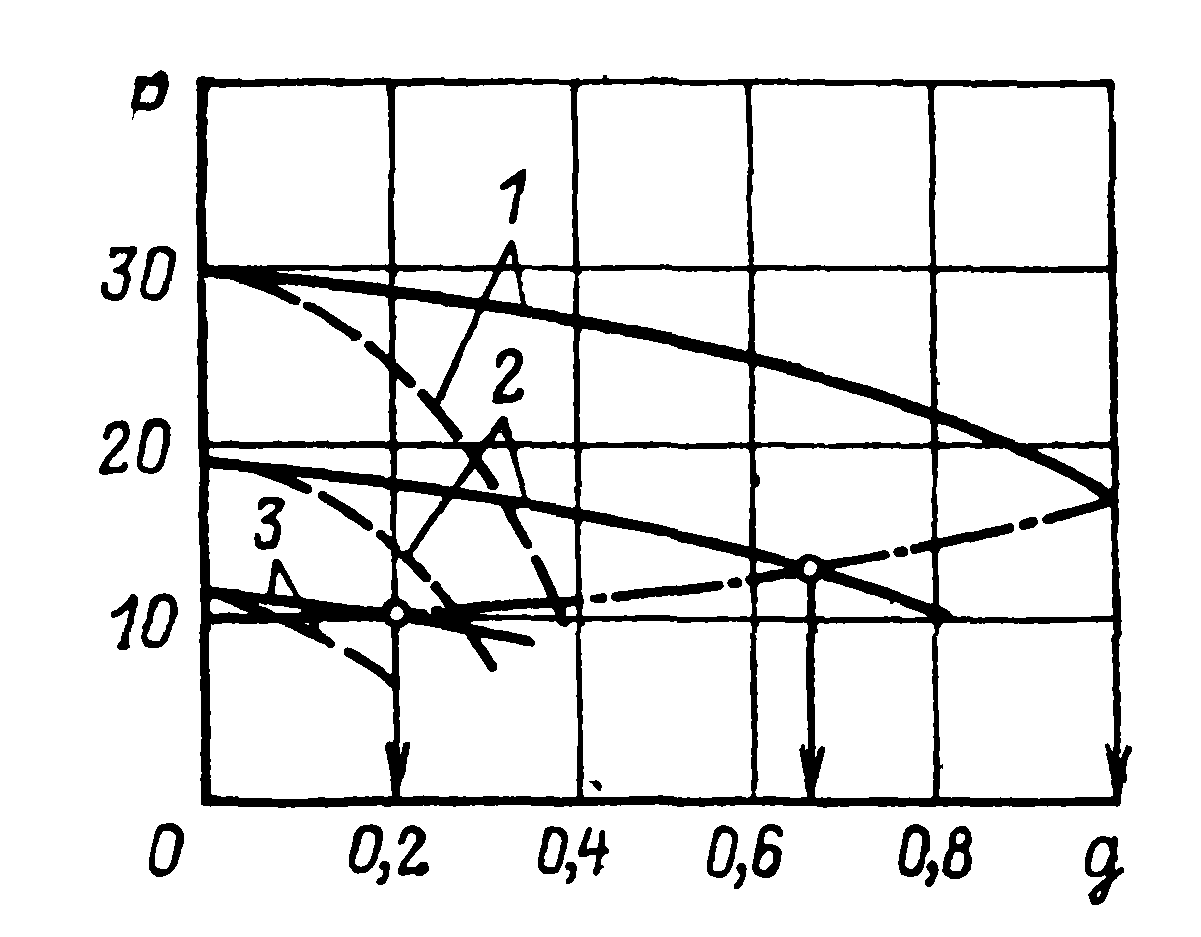
Рис. 8 11. Гидравлические характеристики при изменении частоты вращения насосов:
1 —п/пн=1, 2 —П/Лн« 0,8, 3 —/1/лн= 0,6 —------------------------
характеристика трех работающих насосов;
-------------- характеристика одного работающего
насоса;-------------------- характеристика линии
Таким образом, характеристика насоса при снижении частоты вращения перемещается параллельно самой себе. Если несколько насосов работают параллельно с одной и той- же сниженной частотой вращения, то их суммарная характеристика строится так же, как и для номинальной частоты. На рис. 8.11 показано изменение характеристик насосов в зависимости от частоты вращения. Характеристики построены для одного и для трех параллельно работающих насосов. Там же показана характеристика линии с полностью открытым клапаном; точки пересечения этой характеристики с характеристикой насосов дают соответствующие значения расходов. Из рисунка видно, что при частотах 1,0; 0,8 и 0,6 расходы для трех насосов составляют соответственно 1,0; 0,68 и 0,2. Таким образом, изменение частоты вращения в относительно узком диапазоне (100—60%) обеспечивает регулирование расхода в пределах 100—20%. На практике из-за трудности точного и быстрого изменения частоты вращения используется комбинированный способ, при котором точное регулирование осуществляется регулирующим клапаном, а изменение частоты вращения служит для поддержания приблизительно постоянного перепада на нем. При постоянном перепаде на клапане его рабочая характеристика совпадает с его конструктивной характеристикой, причем перепад выбирается таким, чтобы обеспечить наилучший режим регулирования. В некоторых схемах с помощью изменения частоты вращения поддерживается давление перед регулирующим клапаном. В этом случае перепад на нем слабо зависит от нагрузки и рабочая характеристика близка к конструктивной.
Способы изменения частоты вращения насосов подразделяют на две группы: 1) с изменением частоты вращения вала приводного двигателя; 2) без изменения частоты вращения вала приводного двигателя.
Регулирование частоты вращения приводных электродвигателей насосов можно осуществлять: 1) изменением тока цепи возбуждения двигателя; 2) изменением числа пар полюсов двигателя с коротко- замкнутым ротором; 3) изменением частоты питающего напряжения; 4) изменением нагрузки цепи фазного ротора.

Рис. 812 Схема регулирования частоты вращения питательного насоса с турбоприводом
Первый из перечисленных способов применим для двигателей постоянного тока, остальные — для двигателей переменного тока. Насосы с приводами постоянного тока получили распространение только на небольших экспериментальных реакторах (например, БОР-бО). Частота вращения асинхронных двигателей переменного тока близка к так называемой синхронной частоте, которая равна 60f/т, (8 20)
где т — число пар полюсов статора; f=50 Гц — частота сети
Осуществляя переключения в электрической цепи статора, можно менять т, изменяя тем самым частоту вращения вала двигателя. Например, при т=2, 3, 4, 5 имеем nс=1500, 1000, 750, 600 об/мин/ Такой способ дает ступенчатое изменение частоты вращения насосов и применяется для грубого регулирования частоты ГЦН
Благодаря развитию техники сильно- точных полупроводников разработаны мощные устройства, преобразующие промышленную частоту 50 Гц в другую заданную частоту (статические преобразователи). В соответствии с уравнением (8.20) это позволяет менять число оборотов двигателя.
У асинхронных двигателей с фазным ротором можно, меняя нагрузку цепи ротора, менять их частоту вращения при постоянном значении пс Ранее в качестве нагрузки цепи ротора использовались активные сопротивления Поэтому такой метод регулирования применялся только для двигателей малой и средней мощности (до нескольких сотен киловатт), так как рассеивать большие мощности на активном сопротивлении крайне неэкономично. В настоящее время на базе сильноточных полупроводников разработаны асинхронновентильные устройства, которые позволяют преобразовывать электрический ток, текущий в цепи ротора, в напряжение промышленной частоты и направлять его в питающую сеть, что повышает экономичность такого способа регулирования, и он может быть применен для регулирования мощных (до нескольких МВт) двигателей. В частности, такой метод применяется для регулирования ГЦЦ установки БН-600.
Питательные насосы ряда мощных блоков (ВВЭР-1000) приводятся во вращение не электрическим двигателем, а специальной паровой турбиной (турбопривод). В этом случае частота вращения насоса легко регулируется путем воздействия на регулирующий клапан приводной турбины. При прикрытии этого клапана частота вращения снижается, при открытии увеличивается. На рис. 8.12 показана типовая схема регулирования питательного насоса с турбоприводом (ТПН). Питательный насос 1 приводится во вращение турбиной 2, снабженной собственным конденсатором 3. Пар на турбину подается от первого отбора основной турбины или, при малой нагрузке основной турбины, через быстродействующую редукционную
установку БРУ ТПН. Регулятор частоты вращения турбины 4 получает импульс от датчика числа оборотов 5 и воздействием на регулирующий клапан 6 поддерживает заданную частоту. Регулирование расхода питательной воды осуществляется регулирующим питательным клапаном 7, управляемым регулятором питания. Постоянное давление воды перед клапаном 7 поддерживается регулятором давления 8, получающим импульс от датчика давления 9 и меняющим задание регулятору 4. В различных режимах работы блока давление за питательным клапаном 7 может существенно меняться (например, из-за изменения давления в парогенераторе). В этом случае при постоянном давлении перед клапаном перепад на нем также будет сильно меняться, что нежелательно (см. § 8 2) Поэтому в регулятор давления 8 может вводиться корректирующий импульс 10, меняющий заданное давление перед клапаном в зависимости от давления в парогенераторе или мощности блока так, чтобы перепад на клапане 7 сохранялся приблизительно постоянным.
Если питательный насос приводится во вращение электродвигателем (ЭПН), частота вращения последнего обычно не регулируется. При необходимости регулировать частоту вращения насоса на валу, соединяющем двигатель с насосом, устанавливается гидромуфта (рис. 8.13), позволяющая уменьшать частоту вращения насоса при неизменной частоте двигателя. Гидромуфта состоит из кожуха 1, частично заполненного маслом. В кожухе на небольшом расстоянии друг от друга находятся две крыльчатки. Электродвигатель 2 приводит во вращение жестко закрепленную на его валу ведущую крыльчатку 3. Вращение крыльчатки 3 приводит во вращение масло в кожухе, которое увлекает за собой ведомую крыльчатку 4. Крыльчатка 4 жестко закреплена на валу насоса 5.
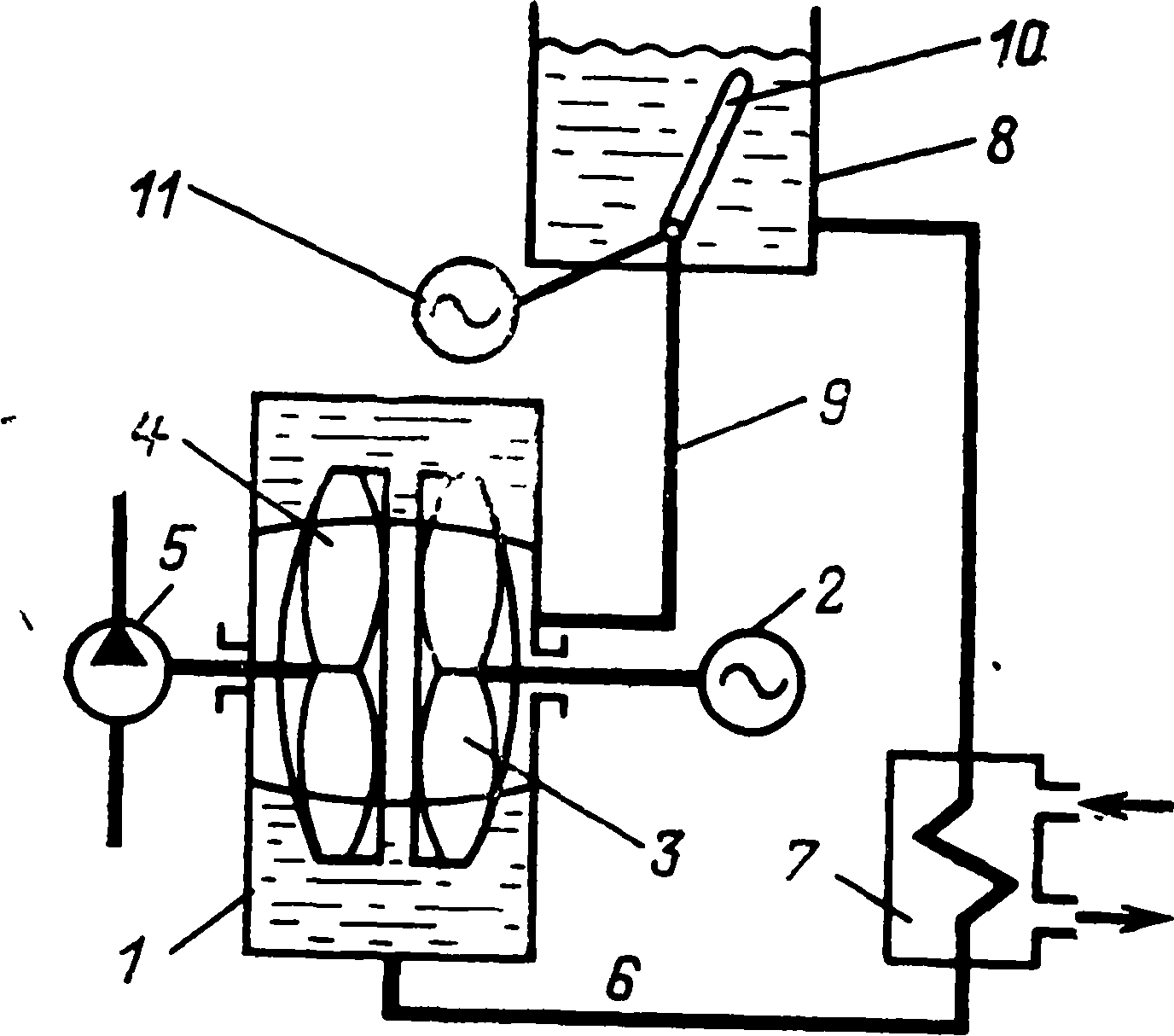
Рис. 8.13. Схема регулирования частоты вращения насоса с помощью гидромуфты
Частота вращения п2 крыльчатки 4 меньше частоты вращения пх крыльчатки 3 за счет проскальзывания 5= = (n2—n1)\n1
Значение проскальзывания 5 зависит от массы масла, находящегося в кожухе. При уменьшении количества масла проскальзывание возрастает. Масло, находящееся в кожухе, за счет центробежной силы отбрасывается в отводящий маслопровод 6 и через охлаждающий теплообменник 7 поступает в напорный бак S. Из бака 8 масло по подводящему трубопроводу 9 поступает в кожух гидромуфты. Уровень в напорном баке определяется положением верхнего конца черпательной трубки 10, которая может поворачиваться вокруг горизонтальной оси с помощью исполнительного механизма 11. Так как полное количество масла в системе постоянно, увеличение его количества в баке 8 при подъеме конца черпательной трубки приводит к уменьшению его количества в кожухе и как следствие — к увеличению проскальзывания.
Обычно на блоке имеется несколько параллельно работающих ЭПН, поэтому при регулировании их подачи ставится задача не только получить заданный суммарный расход, но и равномерно распределить его по насосам. При этом необходимо обеспечить либо одинаковую мощность электродвигателей, либо одинаковое положение черпательных трубок. На рис. 8.14 показана схема регулирования, обеспечивающая равенство мощностей электродвигателей (условно показано два параллельно работающих ЭПН). Насосы 1 приводятся во вращение двигателями 2 через гидромуфты 3. Импульсы по мощности двигателя 5 поступают на регуляторы 4, которые, управляя приводами 6, черпательных трубок, поддерживают постоянную мощность двигателя. Давление перед регулирующим клапаном 7 измеряется манометром 9. Сигнал по давлению подается на регулятор 8, который меняет задание по мощности одновременно всем насосам. На регулятор 8, как и на рис. 8.12, может подаваться корректирующий импульс 10. В некоторых схемах на регулятор 4 вместо сигнала мощности подаются сигналы отклонения тока и напряжения двигателя от их номинальных значений, что приблизительно характеризует мощность двигателя. При регулировании положения черпательных трубок на регулятор 4 подается сигнал от указателей положения трубок.
Регулирование подачи ряда вспомогательных насосов (таких как подпиточные насосы первого контура ВВЭР) часто осуществляется их периодическим включением и выключением, чтобы средняя подача за достаточно большой промежуток времени равнялась заданной.