Автоматические системы регулирования мощности (СРМ) предназначены для поддержания мощности реактора (или локальной мощности, т. е. мощности в отдельных его зонах) в соответствии с заданным значением. Заданное значение может быть постоянным (устанавливается вручную оператором) или меняться в соответствии с требованиями сети; системы первого типа применяются для блоков, работающих в базисном режиме, а второго — для блоков, работающих в регулирующем режиме. В ряде случаев энергоблоки оснащаются системами обоих типов.
В качестве импульса, определяющего мощность реактора, можно брать как сигналы ионизационных камер, так и сигналы теплотехнических параметров. На малых МОЩНОСТЯХ (до 10%) сигналы теплотехнических параметров непредставительны (см. §5.1), поэтому системы, предназначенные для регулирования низких уровней мощности, работают только по сигналам от ионизационных камер. Так как на малых мощностях не требуется высокая точность регулирования мощности, использование такого сигнала приемлемо. Вследствие того что ионизационные камеры подвержены выгоранию (снижению уровня сигнала со временем под действием потока нейтронов), а также из-за влияния на их сигнал таких факторов, как концентрация борной кислоты в теплоносителе или изменение распределения мощности по реактору, коэффициент пропорциональности между мощностью реактора и сигналом камер меняется в широких пределах и более представительным является определение действительной мощности реактора по теплотехническим параметрам. Поэтому на больших уровнях мощности для повышения статической точности применяются регулирование по теплотехническим параметрам или комбинированные схемы, использующие сигналы как ионизационных камер, так и теплотехнических параметров. При необходимости регулирования на больших мощностях по сигналу нейтронного потока требуется периодическая корректировка значения заданной величины тока камер в соответствии с действительной тепловой мощностью реактора. Эта коррекция может осуществляться оператором, устройствами, определяющими тепловую мощность реактора, или по сигналам УВК.
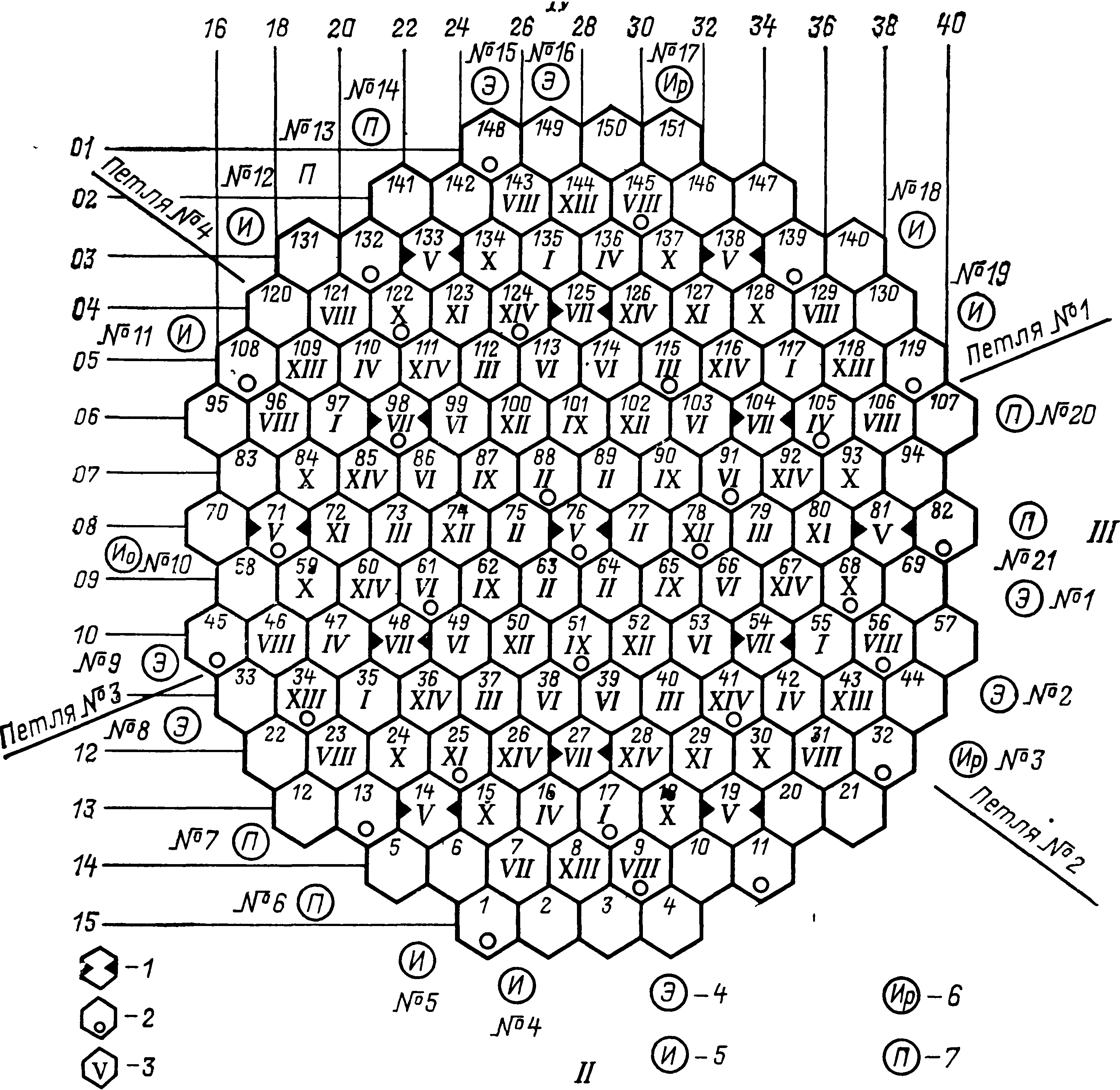
Рис 612. Картограмма размещения групп поглотителей СУЗ, нейтронных измерительных каналов в активной зоне и ионизационных камер СУЗ реактора ВВЭР-1000 V блока НВ АЭС: ,
1— кассеты с поглотителями СУЗ с половинной длиной наполнения поглощающих материалов, 2 — кассеты с нейтронными измерительными каналами, 3— номер группы поглотителей СУЗ, 4 — ионизационные камеры энергетического диапазона; 5 — ионизационные камеры пускового диапазона 6 — резервные ионизационные камеры пускового диапазона, 7— ионизационные камеры промежуточного диапазона
Различают системы регулирования интегральной (средней) мощности, поддерживающие мощность реактора в целом, и локальные автоматические регуляторы (ЛАР), поддерживающие мощность в отдельных частях реакторов ЛАР применяются в больших реакторах, где возможны пространственные перекосы поля тепловыделения. В настоящем параграфе рассматриваются только системы регулирования интегральной мощности.
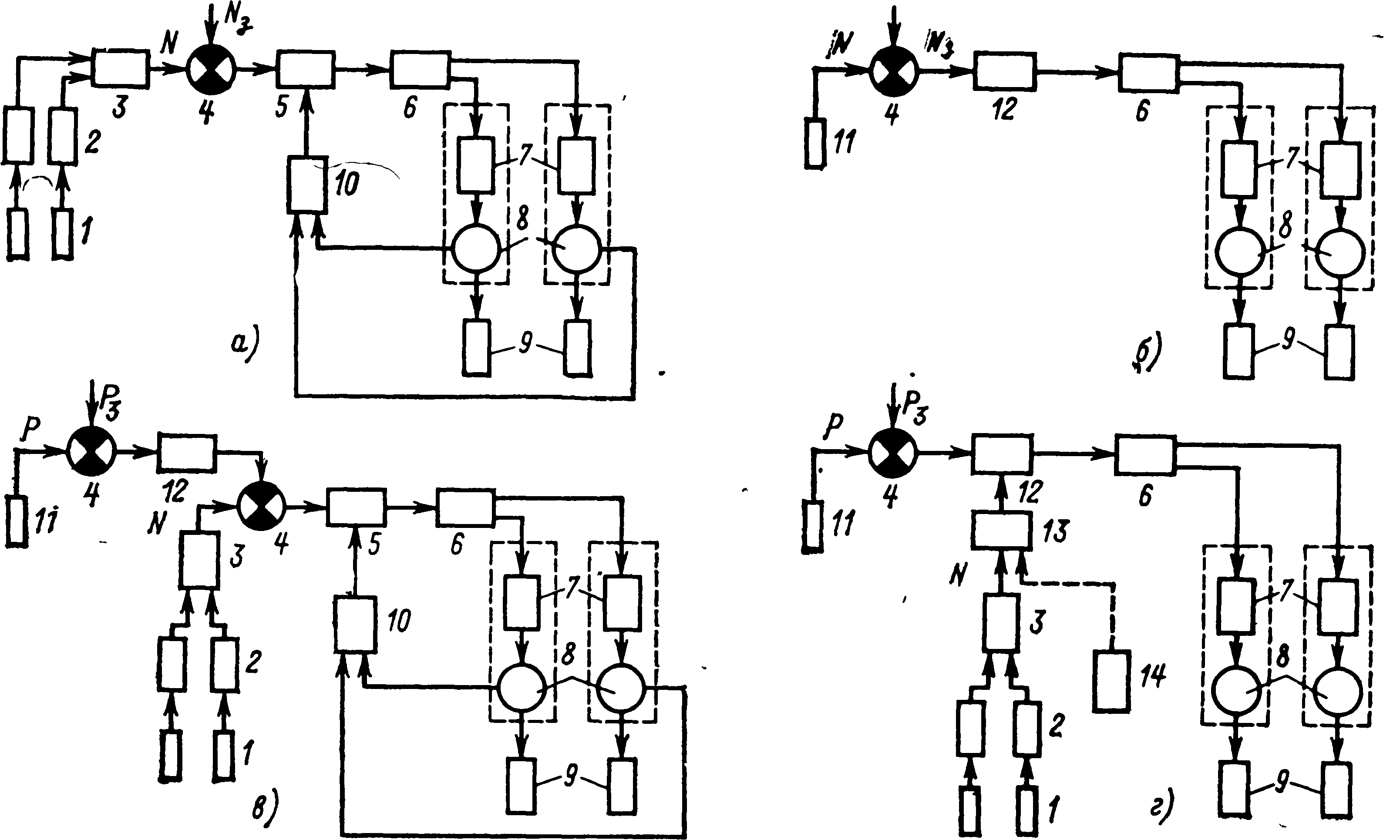
Рис 6 13 Упрощенные структурные схемы одного канала регулятора мощности а —схема регулирования по току ионизационных камер, б — схема регулирования по тепловым параметрам, в — каскадная комбинированная схема, г — объединенная схема регулирования
К системам регулирования мощности различных типов реакторов, их структуре и средствам реализации предъявляется ряд общих требований, среди которых следует упомянуть высокую надежность, соответствие правилам ядерной безопасности, необходимость значительного усиления малых (несколько десятков микроампер) сигналов датчиков нейтронного потока, работу в широком диапазоне мощностей (от 0,1—1 до 100%).
В системах регулирования мощности, в которых используются сигналы нейтронного потока, в качестве датчиков используются ионизационные камеры, ток через которые пропорционален нейтронному потоку в месте расположения камер. Если физические характеристики реактора таковы, что нейтронный, поток в месте расположения камеры с достаточной степенью точности пропорционален энерговыделению в активной зоне реактора, то можно ограничиться одной камерой. Однако для энергетических реакторов больших геометрических размеров, как правило, используют несколько камер, располагаемых по окружности вблизи реактора или в различных точках внутри него. Суммарный ток этих камер будет точнее отображать среднюю по объему мощность реактора.
В связи с тем, что аппаратура аварийной защиты в ряде случаев выполняется трехканальной, а также с целью лучшего осреднения показаний камер количество камер, используемых для регулирования, обычно выбирается кратным трем. В реакторах типа ВВЭР, например, в энергетическом диапазоне используются шесть камер.
На рис 6.12 приведено размещение ионизационных камер реактора ВВЭРЛ000 V блока НВ АЭС. Это размещение характерно и для других реакторов типа ВВЭР. Как видно из рисунка, камеры энергетического диапазона располагаются попарно, причем каждая пара сдвинута по отношению друг к другу на угол около 120°. Такое расположение камер обеспечивает наилучшее осреднение показаний отдельных камер и исключает влияния местных искажений нейтронного поля на СРМ.
Варианты построения каналов контроля нейтронного потока описаны в § 5 3.
Упрощенная схема системы регулирования плотности нейтронного потока показана на рис. 6.13,а. Сигнал от ионизационных камер, усиленный аппаратурой контроля нейтронного потока 2, через сумматор 3 поступает на элемент сравнения 4 (в случае, если система работает от одной камеры, устройство 3 отсутствует). В элементе 4 вырабатывается сигнал t/e, пропорциональный отношению
![]() (6.1)
(6.1)
где I, 3—действительный и заданный токи камеры; N, N3—действительная и заданная плотность нейтронов.
Такая зависимость сигнала от заданного значения необходима вследствие того, что коэффициент усиления передаточной функции реактора приблизительно пропорционален мощности (см. § 3.2). Введение в задатчик закона (6.1) позволяет иметь коэффициент усиления разомкнутой системы объект—регулятор постоянным на всех уровнях мощности, что обеспечивает близкое к оптимальному качество переходных процессов в различных режимах. Сигнал вида (6.1) может быть получен либо делением сигнала отклонения в задатчике на /з, либо подачей на задатчик сигнала логарифма тока ионизационных камер. В последнем случае при малых отклонениях / от /3 в задатчике вырабатывается сигнал
 (6.2)
(6.2)
Сигнал с задатчика поступает в регулятор 5 и далее в усилитель 6, где усиливается до мощности, достаточной для управления двигателем 7 исполнительного механизма 8. В зависимости от конструкции реактора регулятор может управлять одним или несколькими исполнительными органами 9. Для обеспечения требуемого закона регулирования регулятор, как правило, охватывается обратной связью 1Q, на вход которой подается сигнал скорости перемещения исполнительного органа, напряжение на выходе или в промежуточной точке усилителя и т. п. В современных системах управления мощностью реакторов ВВЭР усилитель 6 заменяется трехпозиционным релейным элементом, управляющим двигателем постоянной скорости. В таких системах требуемый закон регулирования формируется блоком 5, и цепочка обратной связи 10 отсутствует.
Как уже отмечалось, использование тока ионизационных камер не позволяет поддерживать мощность реактора с требуемой статической точностью и необходимо регулирование по тепловым параметрам, зависящим от мощности. В реакторах с однофазным теплоносителем в качестве таких параметров принимаются температура теплоносителя на выходе из реактора; температура теплоносителя на выходе из отдельных зон реактора (в больших реакторах с возможными пространственными перекосами); подогрев теплоносителя (разность между выходной и входной температурой) в реакторе (средний по петлям или в наиболее напряженной петле); средняя температура теплоносителя в первом контуре; давление пара второго контура перед турбиной.
В реакторах с кипящей водой регулирование мощности обычно осуществляют по давлению пара.
Схемы, использующие любые из перечисленных параметров, строятся в соответствии с рис. 6.13,6. Сигнал от датчика 11 сравнивается с заданным значением в элементе сравнения 4 и поступает на регулятор 12. Остальные устройства схемы аналогичны рис. 6.13,а. Обладая лучшими статическими характеристиками по сравнению со схемами рис. 6.13,а, схемы рис. 6.13,6 медленнее отрабатывают возмущения по реактивности, так как эти возмущения, практически мгновенно сказываясь на отклонении тока ионизационных камер, со значительным запаздыванием фиксируются датчиками тепловых параметров. Кроме того, при регулировании тепловых параметров обычно из-за нелинейности каналов регулирования оказывается затруднительным обеспечить оптимальность АСР во всех режимах работы установки без изменения настроек регулятора.
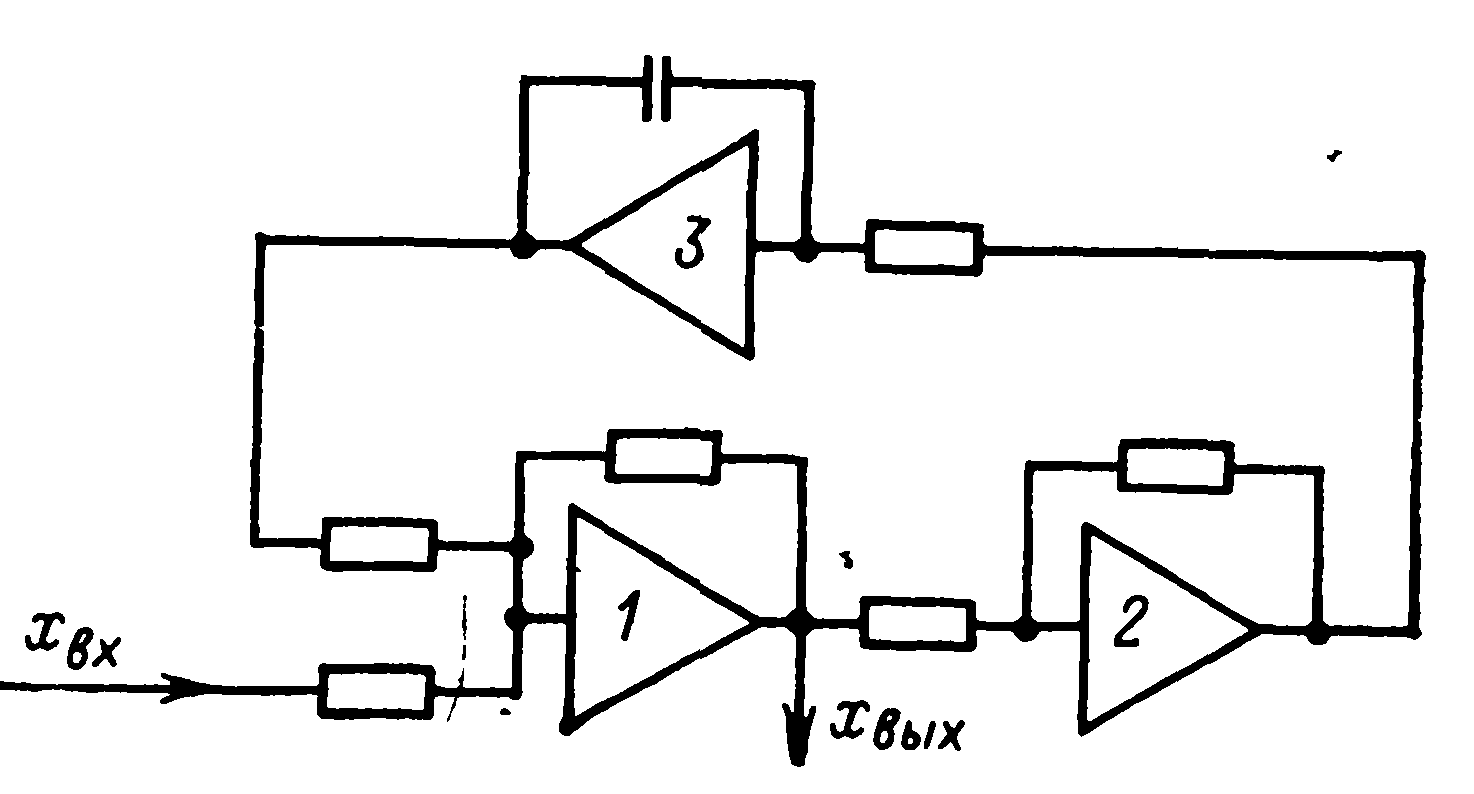
Рис 614. Схема реального дифференциатора
Указанных недостатков лишены комбинированные схемы, использующие как сигналы нейтронного потока, так и сигналы тепловых параметров. На рис. 6.13,в изображена каскадная схема, состоящая из контура регулирования нейтронного потока (аналогичного рис. 6.13,а), на задатчик которого 4 действует регулятор теплового параметра 12, работающий по сигналу от датчика теплового параметра 11. При этом возмущения по реактивности практически мгновенно регистрируются камерами 1 и отрабатываются регулятором 5,1а медленные отклонения, вызванные, например, нарушением пропорциональности между мощностью реактора и током камеры, компенсируются благодаря изменению сигнала задатчика. Из соображений безопасности максимальная скорость перемещения задатчика обычно ограничивается величиной 0,1—1,0%/с, что является достаточным для регулирования мощности реактора в нормальных режимах, но уменьшает мобильность установки в некоторых аварийных режимах, связанных е необходимостью быстрого снижения мощности. Кроме того, для возможности точного поддержания температуры регулятором 12 необходимо иметь малую зону нечувствительности в регуляторе 5, что естественно приводит к частым срабатываниям двигателя исполнительного механизма. Пример более совершенной схемы показан на рис. 6.13,г . Схема подобна показанной на рис. 6.13,6, но здесь в регулятор 12 вводится дополнительный сигнал от дифференциатора 13. В последний сигнал поступает от ионизационных камер 1 через аппаратуру контроля нейтронного потока 2 и сумматор 3. Схема дифференциатора приведена на рис. 6.14. Сигнал по нейтронному потоку подается на усилитель 1, охваченный обратной связью, в которую включены инвертирующий усилитель 2 и интегратор 3. Такая цепочка может быть oписанa уравнением![]()
(6.3)
где k1 и k2—коэффициенты усиления усилителей 1 и 2; Т — постоянная интегрирования интегратора 3; р — переменная преобразования Лапласа.
После преобразования получим передаточную функцию реального дифференциатора
![]() (6.4)
(6.4)
Поскольку на высоких частотах реальный дифференциатор по своим динамическим характеристикам близок к усилительному звену, динамика отработки быстрых возмущений этой системой аналогична схемам 6.13,а и б, а медленные колебания тока камеры не влияют на работу системы. Отработка возмущений по тепловым параметрам производится за счет сигналов от датчика 11, причем в этой схеме не вводится ограничения на значение максимальной скорости изменения сигнала задания.

Рис. 6 15. Способы приведения в соответствие мощности ЯППУ и турбины: а — базисный режим, б — регулирующий режим
Наличие в регуляторе исчезающего сигнала по нейтронному потоку (сигнал из промежуточной точки) облегчает динамическую настройку системы, позволяя без перенастройки получить на различных уровнях мощности реактора переходные процессы, близкие к оптимальным.
В реакторах с переменным расходом однофазного теплоносителя схема (рис. 6.13,г) часто дополняется импульсом по расходу 14, который вводится в регулятор 12 через дифференциатор 13 (рис.6 13,г). Этот импульс служит для компенсации возмущений, так как нейтронный поток будет приближенно следовать за изменениями расхода еще до того, как появится отклонение, фиксируемое датчиком 11.
Кроме описанных предложены более сложные варианты объединенных и каскадных комбинированных систем, например с сигналом производной по мощности, который подается в регулятор только при возрастании мощности, препятствуя ее быстрому подъему.
Система регулирования мощности реактора СРМ должна работать во взаимодействии с системой управления турбиной АСУТ. Так, если СРМ работает в режиме стабилизации нейтронного потока, то необходимо проводить нагрузку турбины Т в соответствие с количеством пара, вырабатываемого ЯППУ. Обычно это осуществляется АСУТ (рис. 6.15,а), получающей импульс по давлению пара перед турбиной и изменяющей его расход на турбину до тех пор, пока давление не вернется к номинальному значению (базисный режим, см. § 2.2). С другой стороны, при работе в регулирующем режиме СРМ должна воздействовать на мощность ЯППУ, приводя ее в соответствие с потреблением пара турбиной (рис. 6.15,6).
Система АСУТ осуществляет в этом случае функции стерегущего регулятора, разгружая турбину при отклонениях от номинальных параметров пара или при сбросе электрической нагрузки. При авариях в технологическом оборудовании (отключение ГЦН) бывает необходим быстрый автоматический переход от режима рис. 6 15,6 к режиму рис. 6.15,а, поэтому часто СРМ и АСУТ выполняются в виде единого комплекса аппаратуры, работающего в зависимости от условий в одном или другом режиме.
Важной задачей СРМ является ограничение мощности реактора в различных аварийных ситуациях отключение турбины, отключение одного из ГЦН и т. п. Поэтому СРМ включает в себя логические устройства, определяющие предельно допустимую мощность реактора в каждой конкретной ситуации и снижающие мощность, если действительная мощность больше допустимой. Обычно при этом СРМ переходит в базисный режим работы. В реакторах ВВЭР отклонения температуры теплоносителя при отключении ГЦН невелики (например, отключение одного ГЦН из шести приводит к увеличению температуры теплоносителя на 6°С), а переходные процессы при отключении турбины протекают относительно медленно. Поэтому переход на допустимый уровень мощности может быть осуществлен перемещением тех же исполнительных органов, с помощью которых осуществляется управление в обычных режимах.
В высоконапряженных реакторах отключение одного ГЦН может привести к сильному отклонению температуры теплоносителя (например, у БН-600 на 100°С). Для предотвращения такого отклонения необходимо снизить мощность до 70% Nhom за время около 10 с. Скоростная эффективность обычных исполнительных органов не может обеспечить такое быстрое снижение Поэтому в СРМ БН-600 по сигналу отключения ГЦН производится падение одного из стержней АЗ, эффективность которого выбрана так, чтобы снизить мощность приблизительно до 70% Nном.
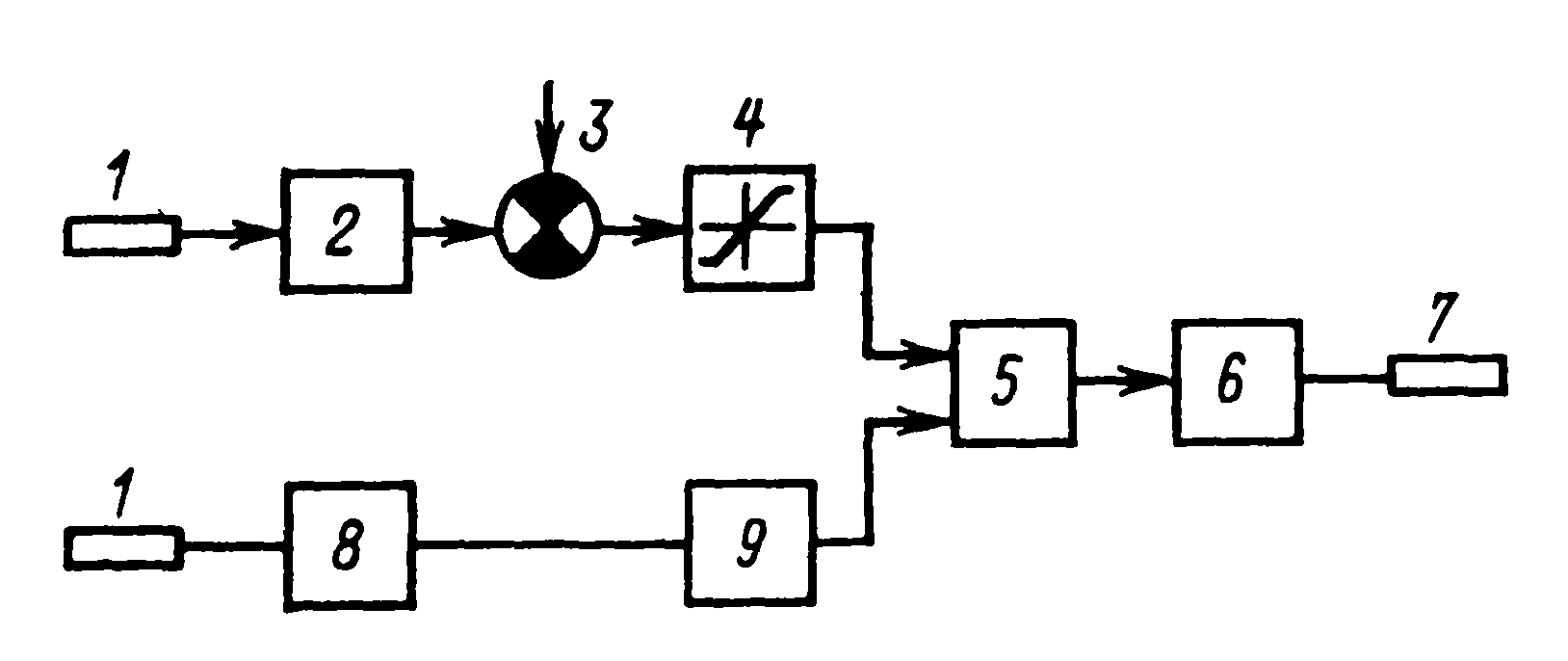
Рис 616 Структурная схема регулятора автопуска
Дальнейший ввод требуемой реактивности (положительной или отрицательной) производится регулятором. Через 1— 2 мин после падения стержень АЗ может быть медленно извлечен, а избыточная реактивность компенсируется при этом опусканием КП за счет работы регулятора. Такое управление исполнительными органами обеспечивает поддержание температуры теплоносителя в этом режиме с точностью до 5—10 °С.
Некоторые СРМ помимо регулирования нейтронного потока также осуществляют автоматический пуск, т. е. автоматический вывод реактора с постоянным периодом из глубокого подкритического состояния на заданный (обычно в диапазоне 0,1 — 10% Whom) уровень мощности. Как было показано в гл. 3 и 5, разгон реактора с постоянным периодом происходит при постоянной положительной реактивности Обычно автоматический пуск осуществляется специальным регулятором, на который также возлагается задача поддержания постоянного уровня нейтронного потока в диапазоне малых мощностей реактора (0,1 —10% Whom) Упрощенная схема регулятора показана на рис 6.16. Сигналы по нейтронному потоку поступают от камер /, предназначенных для определения уровня мощности, суммируются в сумматоре 2У а затем поступают в задатчик 3, где вырабатывается сигнал Ut, пропорциональный относительному отклонению мощности:
![]()
где N, N3 — действительное и заданное значение мощности.
Сигнал Uz поступает в ограничитель 4 с зоной насыщения Uuм, на выходе которого сигнал
Значение UUM обычно равно — (0,1—0,2). Сигнал £/0 поступает в регулирующий блок 5, управляющий силовыми устройствами 6 исполнительного органа 7. Полярность сигнала Uo выбирается таким образом, что при Uo<0 исполнительный орган 7 вносит положительную реактивность.
От другой группы камер 1 сигнал поступает в устройство измерения и контроля 8, где вырабатывается сигнал С/т, обратно пропорциональный периоду Т (Uт=1/T), который через делитель 9 с коэффициентом усиления k также поступает в регулирующий блок 5. Полярность сигнала UT выбирается таким образом, что при увеличении сигнала UT (уменьшении периода, т. е. увеличении реактивности) стержень перемещается вниз.
Работа системы происходит следующим образом Оператор устанавливает требуемый уровень мощности, на который должен выйти реактор, задатчиком 3 При этом N<N3 и с ограничителя 4 на регулирующий блок 5 поступает отрицательный сигнал Uим Так, как в стационарном режиме Т=оо, сигнал Uт=0. После включения системы в работу вносится положительная реактивность, что вызывает увеличение мощности реактора и появление положительного сигнала UT. Когда UT возрастает настолько, что скомпенсирует сигнал на входе регулирующего блока, орган 7 остановится и разгон будет продолжаться при постоянном значении реактивности и периода. Значение периода можно определить из соотношения kUт=иим, откуда T=l/Ui=k/UK, т е значение периода зависит только от настройки блоков 4 и 9 и не зависит от N3. Когда действительная мощность N приблизится к N3 настолько, что (N—N3)/N3<UKM, сигнал на выходе 4 начнет уменьшаться. Это вызовет разбаланс на входе регулятора, и исполнительный орган 7 начнет опускаться, постепенно увеличивая значение периода, с тем чтобы сохранить нулевой разбаланс на входе в регулятор. При N=)N3 Uc—0 и для баланса на входе в блок 5 будет необходим нулевой сигнал на выходе 9, т. е. реактор будет работать на постоянном уровне мощности. Если увеличить задатчиком заданную мощность более чем на 10—20%, произойдет насыщение блока 4 и реактор начнет увеличивать мощность с тем же периодом, с которым производился вывод из подкритического состояния, до тех пор, пока действительный уровень мощности не достигнет заданного.

Рис. 6.17. Схемы многоканальных СРМ: в — двухканальная СРМ, б — трехканальная СРМ