Регулирование скорости вращения асинхронных двигателей производят несколькими способами. Формула скорости вращения асинхронных двигателей:
![]() (7.7) где s — скольжение в долях единицы показывает, что скорость вращения может регулироваться изменением частоты тока f, числа пар полюсов р и скольжения s.
(7.7) где s — скольжение в долях единицы показывает, что скорость вращения может регулироваться изменением частоты тока f, числа пар полюсов р и скольжения s.
Регулирование скорости вращения изменением величины скольжения асинхронного электродвигателя возможно двумя способами:
- введением в цепь ротора дополнительного сопротивления, что возможно для двигателей с фазным ротором;
- изменением реактивных сопротивлений (дросселей насыщения), включаемых в обмотку статора.
Регулирование скорости асинхронных электродвигателей с фазным ротором введением в его цепь дополнительного сопротивления позволяет уменьшать его скорость практически не более чем на 40—50% номинальной скорости.
При таком регулировании с увеличением сопротивления реостата увеличивается величина скольжения, т. е. уменьшается число оборотов двигателя. В этом случае схема регулирования сходна со схемой пуска асинхронного электродвигателя с фазным ротором (см. рис.7.8) с той разницей, что регулировочный реостат должен быть рассчитай на длительную нагрузку током. Регулирование скорости с помощью добавочного сопротивления в цепи ротора приводит к неустойчивой работе электродвигателя на малых оборотах, так как при этом приходится включать большие сопротивления, что приводит к значительным колебаниям скорости при небольших изменениях момента сопротивления нагрузки. Кроме того, этот способ мало экономичен, так как увеличивает потери в роторной цепи.
Описанный способ регулирования асинхронных электродвигателей с фазным ротором применяется в тех случаях, когда работа электродвигателя с пониженной скоростью непродолжительна и когда не требуется большой точности регулирования, например для регулирования скорости движения механизмов подъемно-транспортных установок.
Регулирование скорости асинхронных электродвигателей при помощи дросселей насыщения состоит в том, что в цепь статора электродвигателя включаются реактивные сопротивления с переменной индуктивностью. Изменение индуктивности реактивных сопротивлений (дросселей) осуществляется пропусканием постоянного тока различной величины через обмотку управления дросселями (рис. 7.13, а).
Изменяемое индуктивное сопротивление в цепи статора электродвигателя позволяет получать на зажимах машины различное напряжение (рис. 7.13, б), чем достигается изменение скольжения, т. е. скорости вращения ротора. Достоинством описанного способа является плавное регулирование скорости вращения электродвигателя; недостатками — значительное уменьшение максимального вращающего момента, а также уменьшение коэффициента мощности и к. п. д. электродвигателя.
Регулирование скорости вращения асинхронного электродвигателя за счет изменения числа пар полюсов осуществляется переключением обмотки статора и является ступенчатым. Для этих целей применяют специальные асинхронные многоскоростные электродвигатели, выпускаемые промышленностью и рассчитанные на 2, 3 и 4 скорости. Так, например, четырех скорости ой электродвигатель может иметь синхронные скорости вращения 500, 750, 1000 и 1500 об/мин.

Рис. 7.13. Схема включения и регулирования скорости асинхронных двигателей с короткозамкнутым ротором при помощи дросселей насыщения:
а — схема включения; б — механические характеристики

Рис. 7.14. Переключение проводов для изменения направления вращения асинхронного двигателя
Изменение числа пар полюсов достигают наиболее простым способом при устройстве двух независимых обмоток на статоре асинхронного электродвигателя. Такие электродвигатели выпускают с синхронными скоростями вращения 1000/1500 об/мин.
Двухскоростные электродвигатели имеют шесть, трехскоростные— девять и четырехскоростные — двенадцать выводов к переключателю полюсов.
Регулирование скорости вращения асинхронного электродвигателя изменением частоты тока требует применения специального источника переменного тока с изменяемой частотой. Этот способ еще не нашел применения для регулирования скорости электроприводов строительных машин, но является весьма перспективным при использовании для статических преобразователей частоты управляемых, полупроводниковых вентилей-тиристоров, производство которых в настоящее время развивается (о тиристорах см. гл. 10).
Изменение направления вращения асинхронного двигателя — реверсирование достигается изменением направления вращения магнитного
поля. Для этого достаточно переключить любые два провода трехфазной системы, подводящие ток к статору двигателя. На рис. 7.14 приведена схема такого переключения. При переключении трех проводов направление вращения магнитного поля статора, а следовательно, и ротора двигателя не изменится.
§ 7.9. Потери энергии и коэффициент полезного действия асинхронных электродвигателей. Коэффициент мощности двигателей
Электрическая энергия, расходуемая при работе асинхронного электродвигателя, затрачивается на полезную механическую работу и на покрытие потерь: электрических, магнитных и механических.
Потери в меди или электрические потери обусловлены нагреванием обмоток статора и ротора при протекании по ним тока. Потери в стали (магнитные потери) состоят из потерь на вихревые токи и на перемагничивание в стальных частях статора и ротора. Потери на вихревые токи пропорциональны квадрату частоты тока, а на перемагничивание — первой степени частоты тока. Магнитные потери главным образом происходят в статоре. Потери в стали ротора ничтожно малы вследствие малой частоты его тока и поэтому ими можно пренебрегать.
Механические потери состоят из расхода энергии на трение в подшипниках, трение ротора о воздух и воздуха в вентиляционной системе электродвигателя. Эти потери зависят от скорости вращения ротора, его диаметра, типа подшипников и конструкции вентиляционной системы двигателя.
Коэффициентом полезного действия (к. п. д.) двигателя называют отношение полезной механической мощности Р3 на валу двигателя к затраченной мощности, потребляемой из сети P1
![]() (7-8)
(7-8)
Так как разница между затраченной и полезной мощностью равна потерям, то формулу получения к. п. д. двигателя можно записать в следующем виде:
![]() (7.9)
(7.9)
где рм — потери в меди или электрические потери; рс — потери в стали или магнитные потери;
Рмех — механические потери.
Потери в меди являются переменными, зависящими от нагрузки, вследствие того что с увеличением тока увеличивается назревание обмоток.
Потери в стали (магнитные) и механические потери являются постоянными, так как не зависят от нагрузки.
Коэффициент полезного действия двигателя изменяется в зависимости от нагрузки.
Наибольшей величины к. п. д. достигает при нагрузке, равной примерно 0,75 номинальной, а затем с увеличением нагрузки к. п. д. уменьшается вследствие увеличения электрических потерь на нагревание обмоток (рис. 7.15, а).
Большое магнитное сопротивление воздушного зазора между статором и ротором асинхронного двигателя приводит к значительной величине намагничивающего (реактивного) тока, составляющего примерно 0,4—0,7 от номинальной силы тока электродвигателя. В связи с этим двигатель всегда работает с cos φ, меньшим единицы. При полной нагрузке коэффициент мощности cos φ двигателей достигает максимальной величины 0,8—0,9 (рис. 7.15, б).
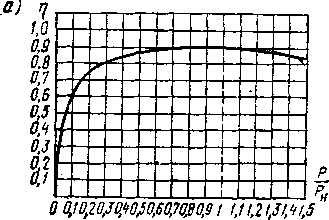
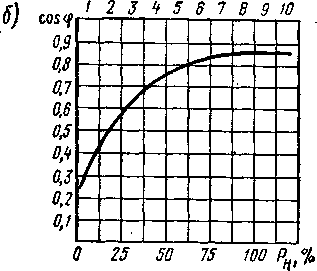
Рис. 7.15. Зависимость коэффициента мощности асинхронного двигателя от его нагрузки
С уменьшением нагрузки коэффициент мощности снижается, что объясняется малой зависимостью от нагрузки намагничивающего (реактивного) тока. Сила тока двигателя складывается из двух величин: активного тока, зависящего от нагрузки, и реактивного тока, независимого от нагрузки. Поэтому при механической недогрузке активный ток уменьшается и, следовательно, увеличивается относительная величина реактивного тока, что приводит к снижению коэффициента мощности cos φ.