РАЗДЕЛ ВТОРОЙ
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
Электрические машины, действия которых основаны на электромагнитных явлениях и которые служат для преобразования механической энергии в электрическую, называют электромашинный и генераторами, а преобразующие электрическую энергию в механическую — электродвигателями. Применяют также электрические машины для преобразования электрической энергии одних параметров в другие, которые называют преобразователями. Преобразовываться могут: род тока, частота, напряжение, число фаз и другие параметры электроэнергии.
Электрические генераторы приводятся во вращение паровыми и водяными турбинами, двигателями внутреннего сгорания и др. Электродвигатели служат для приведения в действие станков, различных машин, транспортного оборудования и др. К электрическим машинам часто относят также трансформаторы — статические аппараты, не имеющие движущихся частей, но по своему устройству и принципу действия имеющие много общего с электрическими машинами. Электрические машины обладают свойством обратимости, т. е. могут работать генератором, если их вращать каким-либо двигателем или если к ним подводить электроэнергию, могут использоваться как электродвигатели. Однако при проектировании электромашин учитывают требования, предъявляемые особенностями их работы генератором или электродвигателем. Электрические машины подразделяются на машины переменного тока и машины постоянного тока. Электрические машины переменного тока разделяют на синхронные, асинхронные и коллекторные. Наибольшее применение имеют синхронные генераторы переменного трехфазного тока и трехфазные асинхронные электродвигатели. Коллекторные электродвигатели переменного тока имеют ограниченное применение вследствие сложности устройства, обслуживания и более высокой стоимости. Основным их преимуществом является возможность регулирования скорости вращения в широких пределах, что затруднительно в асинхронных двигателях. Электрические машины постоянного тока представляют собой сочетание машин переменного тока с механическим выпрямителем- коллектором, являющимся неотъемлемой частью этих машин. С помощью коллектора переменный ток преобразуется в постоянный ток. Электрические машины постоянного тока имеют ограниченную область применения вследствие более высокой стоимости этих машин и их эксплуатации по сравнению с машинами переменного тока.
ГЛАВА СЕДЬМАЯ
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПЕРЕМЕННОГО ТОКА
АСИНХРОННЫЕ ДВИГАТЕЛИ
Асинхронные электродвигатели переменного тока были изобретены и впервые применены русским инженером М. О. Доливо-Добровольским в 1889 г. Асинхронные электродвигатели переменного трехфазного тока вследствие простоты устройства и эксплуатации, надежности действия и низкой стоимости по сравнению с электродвигателями других конструкций, получили самое широкое применение во всех отраслях народного хозяйства, в том числе и для привода строительных машин и механизмов. Питание электродвигателей переменного тока производят через трансформаторы непосредственно от районных электросетей, что уменьшает потери электроэнергии, имеющейся при применении двигателей постоянного тока. В последнем случае помимо трансформации высокого напряжения переменного тока применяется его преобразование в постоянный ток, связанное с дополнительными потерями электроэнергии.
Асинхронные электромашины, присоединенные к электросети, как и все электрические машины, обладают свойством обратимости, т. е. могут работать как двигатели и как генераторы.
В первом случае электроэнергия, получаемая из сети, расходуется на приведение электродвигателя во вращение, во втором случае вращение ротора асинхронной машины с помощью механического двигателя (внутреннего сгорания или парового) с определенной скоростью приводит к получению электроэнергии, передаваемой в электросеть.
Примером работы асинхронной машины в качестве электродвигателя и электрогенератора может быть подъемный кран. При подъеме груза машина работает как электродвигатель, потребляя электроэнергию из сети. Эта же машина может при известных условиях работать генератором, если под весом опускаемого груза ее ротор будет вращаться со скоростью, превышающей определенную величину. В последнем случае энергия будет передаваться в электросеть (рекуперация энергии).
§ 7.1. Принцип действия асинхронного электродвигателя
Принцип действия трехфазного асинхронного электродвигателя основан на явлении вращающегося магнитного поля, описанном в гл. 5.
Вращающееся магнитное поле может быть двухполюсным, четырехполюсным, шестиполюсным и т. д.
Скорость вращения поля определяется соотношением
![]() (7.1)
(7.1)
где η — скорость вращения поля, об/мин;
f — частота трехфазного тока;
р — число пар полюсов,
В асинхронном электродвигателе катушки из провода, необходимые для получения вращающегося магнитного поля, размещаются на неподвижной части двигателя — его статоре. В качестве примера на рис. 7.1 схематически показано размещение шести катушек на статоре асинхронного электродвигателя.
Принцип действия асинхронного двигателя состоит в следующем. Во вращающееся двухполюсное магнитное поле помещен один или несколько замкнутых витков (рис. 7.2).
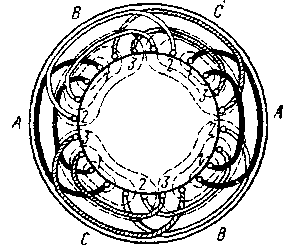
Рис. 7.1. Схема расположения шести катушек на статоре асинхронного электродвигателя

Рис. 7.2. Принцип действия асинхронного электродвигателя
На рисунке вращающееся поле условно изображено в виде двух полюсов электромагнита, вращающегося по часовой стрелке. Магнитные силовые линии при вращении поля пересекают виток и по известному нам закону электромагнитной индукции наводят в нем э. д. с. Если замкнуть виток, в нем под действием э. д. с. будет протекать электрический ток.
Направление тока в проводах витка, определяемое по правилу правой руки*, показано на рисунке крестиком и точкой. Магнитный поток, создаваемый током вокруг витка, будет взаимодействовать с вращающимся магнитным полем статора и в результате этого взаимодействия проводник будет двигаться. Направление механических сил, действующих на проводники, составляющие виток, определяется по правилу левой руки. На рисунке эти силы показаны стрелками. Из рисунка видно, что под действием указанных сил виток будет вращаться в ту же сторону, в какую вращается магнитное поле. Скорость вращения витка оказывается близкой к скорости вращения магнитного поля, но не равной ей (несколько меньшей).
Таков принцип действия асинхронного электродвигателя. Двигатель называется асинхронным потому, что его ротор вращается не синхронно с вращающимся магнитным полем, т. е. несколько отстает от него. Ни при каких условиях синхронного вращения ротора быть не может, так как в этом случае магнитные силовые линии поля не будут пересекать проводники ротора, а следовательно, в них не будет протекать ток, на взаимодействии которого с вращающимся магнитным полем основана работа электродвигателя.
§ 7.2. Конструктивное устройство асинхронных электродвигателей
Асинхронный электродвигатель состоит из следующих основных частей: неподвижной части — статора, вращающейся части — ротора и двух подшипниковых щитов, в которые помещают концы вала ротора (рис. 7.3).
Короткозамкнутый ротор с обмоткой в виде беличьего колеса показан на рис. 7.3. Медные стержни «беличьего колеса» закладываются в пазы ротора и накоротко замыкаются двумя медными торцевыми кольцами (7.3, а).
* Пользуясь в данном случае правилом правой руки, следует учесть, что направление движении проводника относительно линий магнитного поля будет обратно направлению вращения поля, т. е. будет направлено против часовой стрелки.
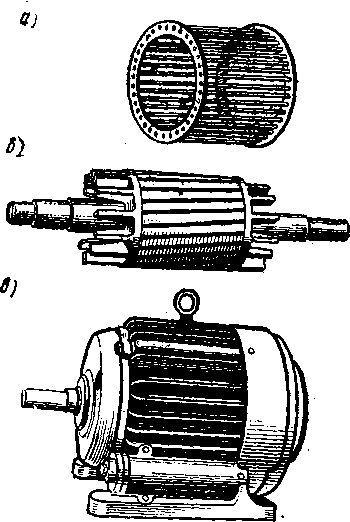
Рис 7.3. Электродвигатель с короткозамкнутым ротором:
а — беличье колесо ротора; б — короткозамкнутый ротор; в — общий вид

Рис. 7.4. Стальной лист статора
Часто «беличье колесо» ротора выполняется из алюминия, путем заливки пазов ротора расплавленным алюминием (7.3, б).
В чугунный или алюминиевый корпус статора запрессовывается кольцеобразный сердечник, собранный из стальных листов (рис. 7.4), толщиной 0,5 мм, изолированных друг от друга слоем лака или тонкими листами бумаги. Из таких же стальных штампованных листов собирают ротор. Сердечники служат магнитопроводом для магнитного потока, создаваемого обмоткой статора и ротора, которая размещается в пазах, выштампованных в сердечниках. Устройство сердечников из тонких стальных листов приводит к уменьшению вихревых токов, образуемых в них при пересечении магнитными потоками.
Обмотка статора выполняется в виде катушек из изолированного провода, заранее заготовленных и уложенных в пазы.
Шесть концов трехфазной обмотки статора выводятся наружу и крепятся к контактным зажимам специального щитка на корпусе электродвигателя или снабжаются маркированными наконечниками.

Рис. 7.5. Щитки с зажимами асинхронного двигателя

Рис. 7.6. Электродвигатель с фазным ротором:
а — ротор с контактными кольцами; б — общий вид
Выведенные концы дают возможность соединить обмотку статора и в звезду и в треугольник. При наличии щитка концы фаз подводятся к его зажимам (для удобства пересоединения обмотки) по схеме, указанной на рис. 7.5. Пересоединяя металлические планочки, имеющиеся на щитке, в одном случае получается соединение обмотки в треугольник, в другом — в звезду. При конструкциях электродвигателя без выводного щитка соединение обмотки в звезду или в треугольник достигается соответственным соединением ее выведенных маркированных концов.

Рис. 7.8. Схема включения асинхронного- двигателя с контактными кольцами:
1 — обмотка статора; 2 — обмотка ротора; 3 — контактные кольца; 4 — щетки; 5 — реостат
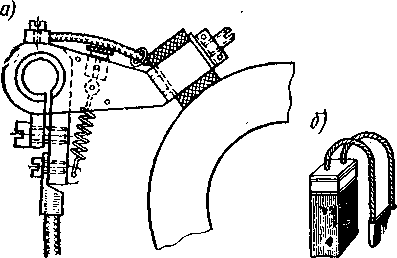
Рис. 7.7. Пружинный щеткодержатель: а—общий вид; б —щетка
Пересоединение обмотки статора позволяет использовать один и тот же электродвигатель при двух напряжениях. Так, например, если электродвигатель рассчитан на работу при соединении обмоток статора в звезду под напряжением 380 В, то он может развивать ту же мощность и при тех же оборотах под напряжением 220 В при соединении обмоток статора в треугольник. Обмотки роторов асинхронных электродвигателей небольшой мощности выполняют короткозамкнутыми, а средней и большой мощности с трехфазной обмоткой из изолированных проводов так же, как и обмотка статора. На рис. 7.6 показан электродвигатель с фазным ротором, трехфазные обмотки которого выполнены из изолированного провода. Обмотка уложена в пазы ротора так, что концы их соединены в звезду на самом роторе, а начала проводов присоединяются к трем контактным кольцам, насаженным на вал ротора и изолированным от вала и друг от друга. Ротор с контактными кольцами, называемый также фазным ротором, позволяет включать в свою цепь добавочное сопротивление реостата при пуске электродвигателя или для регулирования его оборотов. Обмотка ротора соединяется с кольцами изолированным проводом, пропущенным через отверстие, высверленное в валу. По кольцам скользят щетки, через которые обмотка ротора соединяется с реостатом. Щетки изготовляют из угля или смеси угля с графитом. Для машин с контактными кольцами применяются также щетки с содержанием меди или бронзы. На рис. 7.7 показан пружинный щеткодержатель со щеткой и часть контактного кольца. Схема включения асинхронного двигателя с фазным ротором (с контактными кольцами) представлена на рис. 7.8.
§ 7.3. Синхронная скорость вращения и скольжения
При включении асинхронного двигателя в сеть по обмоткам статора начинает протекать ток, создающий вращающийся магнитный поток. Скорость вращения этого потока % определяется формулой, приведенной в § 7.1, и называется синхронной. Вслед за вращающимся магнитным потоком начинает вращаться ротор со скоростью n2< n1.
Отношение
![]()
(7.2)
называется скольжением, так как показывает, насколько скорость вращения ротора отстает от вращающегося магнитного поля.
В момент включения электродвигателя, когда его ротор еще не стронулся с места, n2 = 0 и s = 1. Если предположить, что ротор вращается со скоростью магнитного поля, то п2 = щ и s = 0. Таким образом, теоретически скольжение меняется от 0 до 1 и от 0 до 100%. При увеличении нагрузки на валу электродвигателя, т. е. тормозного момента, скольжение ротора возрастает потому, что только при этом будет увеличиваться э. д. с. в обмотке ротора и ток, обусловливающий вращающий момент. В зависимости от номинальной мощности и типов электродвигателей при полной нагрузке скольжение обычно колеблется в пределах от 2 до 8%. У выпускаемых промышленностью электродвигателей повышенного скольжения при полной нагрузке скольжение составляет 8—12%.
§ 7.6. Механическая характеристика асинхронного электродвигателя
Для электропривода машин, в том числе и строительных, большое значение имеют механические характеристики электродвигателей.
Механической характеристикой называют зависимость скорости вращения электродвигателя от нагрузки на его валу, т. е. п = f (М), или s = f (М), где п — скорость вращения, s — величина скольжения, М — момент вращения, развиваемый двигателем.
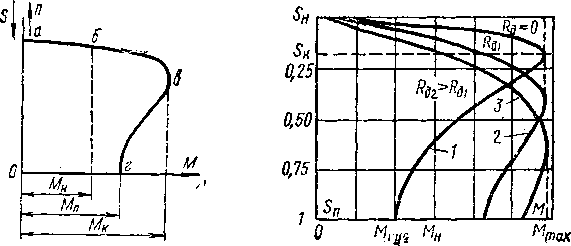
Рис. 7.10. Механическая характеристика асинхронного двигателя с короткозамкнутым ротором:
Рис. 7.11. Механические характеристики асинхронного электродвигателя с фазным ротором:
1 — естественная характеристика; 2 и 3 — искусственные характеристики
Механические характеристики подразделяются на естественные и и с к у с с т в е н н ы е. Естественной называют такую характеристику электродвигателя, которая образуется без какого-либо изменения схемы его включения (т. е. без введения дополнительного сопротивления в его цепи или изменения величины подводимого напряжения и др.). Искусственными же называют характеристики, получаемые изменением указанных выше величин (дополнительных сопротивлений, величины подводимого напряжения и т. д.).
На рис. 7.10 приведены механические характеристики асинхронных электродвигателей. На рис. 7.10 показана естественная характеристика двигателя с короткозамкнутым ротором. На участке кривой характеристики а — б — в, соответствующей устойчивой работе двигателя при увеличении вращающего момента от нуля до максимального его значения, скорость вращения уменьшается незначительно. Такая ме ханическая характеристика называется жесткой. Итак, асинхронный двигатель с короткозамкнутым ротором обладает жесткой механической характеристикой.
На рис. 7.11 показаны механические характеристики асинхронного двигателя с фазным ротором. Кривая 1 — естественная характеристика этого двигателя аналогична рассмотренной выше характеристике двигателя с короткозамкнутым ротором. Остальные кривые 2 и 3 представляют собой искусственные (так называемые — реостатные) механические характеристики того же двигателя, получаемые введением в цепь ротора дополнительных сопротивлений: RY и /?2, причем /?2 > Rx. Как видно из рисунка, искусственные характеристики изменяют характер зависимости п = f (М): при увеличении момента М скорость вращения п значительно уменьшается и тем скорее, чем больше дополнительное сопротивление, вводимое в цепь ротора. Такого рода характеристики называются мягкими. Итак, у асинхронного электродвигателя с фазным ротором есть жесткая естественная механическая характеристика и мягкие искусственные механические характеристики, получаемые при введении в цепь ротора дополнительных сопротивлений: при одном и том же значении М скольжение s, а следовательно, и скорость вращения п могут быть различными. Это свойство двигателя используется в качестве одного из способов регулирования числа оборотов асинхронных двигателей (см. следующий параграф).