В настоящей главе описаны такие приводы, которые в свое время в аппаратостроении занимали большое место, но по ряду причин в настоящее время они не изготовляются, хотя в эксплуатации они еще имеются. На рис. 9-1 показана схема инерционного двигательного привода типа ПИ. Принцип действия этого привода состоит в запасе энергии вращающимися маховиками, после чего запасенная энергия отдается на включение выключателя.

Рис. 9-1. Схема инерционного привода типа ПИ.
О—вал зубчатого колеса; 1 — электродвигатель; 2 — маховик; 3—зубчатое колесо; 4—сцепляющее устройство; 5 — катушка; 6—центробежное реле; 7—эксцентриковый кулачок; 8 — ролик; 9 — шток; 10 —вал выключателя; 11 — катушка отключения.
Процесс включения выключателя этим приводом можно разделить на два периода. Первый период, когда привод разобщен с выключателем и электродвигатель вращает только маховик, при этом маховик накопляет энергию, достаточную для включения выключателя. После того, когда маховик достигнет необходимого числа оборотов, привод становится готовым к включению выключателя. Во втором периоде электродвигатель отключается и выключатель включается за счет энергии, накопленной в маховых массах. Из этого следует, что повреждения в цепи электродвигателя не могут влиять на правильность процесса включения.
Кроме того, мощность электродвигателя может быть взята незначительной, так как процесс включения зависит только от разгона маховика, а время, необходимое для подготовительного процесса, может быть взято более длительным.
На рис. 9-1 видно, что на валу электродвигателя 1 сидит жестко связанный массивный маховик 2 и через червячную передачу вал двигателя связан с большим зубчатым колесом 3.
При команде оператора со щита управления двигатель 1, вращаясь, приводит во вращение большое зубчатое колесо 3, которое свободно сидит на валу 0, а также
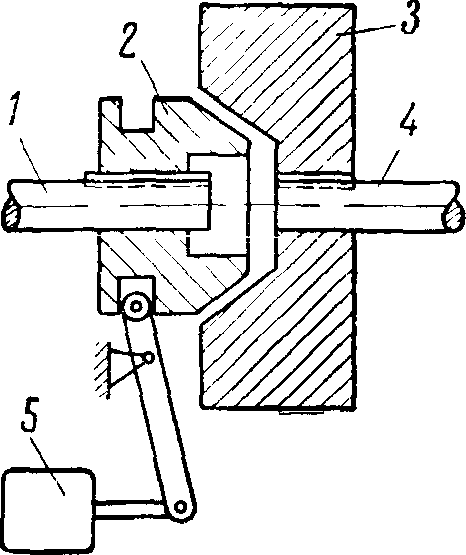
Рис. 9-2. Сцепляющее устройство—муфта. 1 и 4 - вспомогательные валы; 2 и 3 — полумуфты; 5—катушка.
приводит во вращение и массивный маховик 2. Когда двигатель достигнет нормального числа оборотов (около 2 500 об/мин), все подвижные части и главным образом маховик 2 обладают необходимым запасом энергии достаточной величины для включения выключателя. Время разгона маховика занимает около 10 сек при мощности двигателя около 0,5 квт.
При достижении необходимого разгона, т. е. при запасе приводом необходимой энергии, центробежное реле 6 подает сигнал оператору на щит управления о том, что привод готов к включению выключателя. Оператор, получив такой сигнал, в нужный момент подает вторую команду через катушку 5, которая воздействует на сцепляющее устройство 4, и это устройство производит сцепление зубчатого колеса 3 с сидящим на том же валу 0 эксцентриковым кулачком 7, который через ролик 8 и шток 9 производит включение выключателя. При этом поворачивается вал выключателя 10 с помощью системы рычагов, изображенной в верхней части рисунка. Вся эта система рычагов представляет собой механизм свободного расцепления, аналогичный механизмам, какие были описаны ранее.
Сцепляющее устройство 4 показано на рис. 9-2, оно выполнено таким образом, что когда кулачок 7 совершает один оборот, это устройство автоматически расцепляет кулачок с зубчатым колесом 3, в то время как вращение продолжается до тех пор, пока оно не остановится естественным путем. Отключение выключателя производится при помощи катушки 11, воздействующей на механизм так же, как было описано ранее.
В этом приводе электродвигатель может быть применен как постоянного, так и переменного тока, что является преимуществом таких приводов. Недостатком таких приводов является то, что невозможно включить выключатель в любой промежуток времени, так как для включения необходимо развить определенную скорость вращения маховика. Кроме того, конструкция его сложна, он дорог и менее надежен в эксплуатации по сравнению с электромагнитными приводами. Вследствие этого такие приводы в СССР в настоящее время не изготовляются.