Глава пятая ГРУЗОВЫЕ ПРИВОДЫ
1. НАЗНАЧЕНИЕ ГРУЗОВОГО ПРИВОДА
Для автоматизации и телемеханизации управления выключателями на мелких подстанциях необходимы такие приводы, которые обеспечивали бы включение выключателя от импульса, переданного устройством телеуправления или же автоматическое включение от действия устройств автоматического повторного включения (АПВ) или автоматического включения резерва (АВР), но не требовали бы дорогостоящих мощных аккумуляторных батарей или специальных компрессорных установок.
Этим условиям удовлетворяют грузовые приводы.
Как было отмечено, грузовые приводы могут быть подразделены на: 1) приводы с ручным заводом при помощи мускульной силы оператора и 2) приводы· с заводом при помощи электрического двигателя.
Эти приводы применяются для выключателей, имеющих статический максимальный момент на валу при включении не более 40 кГ·м, с работой включения до 16 кГ-м при изменении угла поворота вала от 90 до 160.
2. ГРУЗОВОЙ ПРИВОД С РУЧНЫМ ЗАВОДОМ ТИПА ПГ-10
а) Конструкция привода.
Ленинградский завод "Электроаппарат" выпускает автоматические грузовые приводы с ручным заводом, в которых оперативное включение выключателя производится посредством энергии падающего груза. Общий вид такого привода показан на рис. 5-1, где груз 4 соединен посредством троса со шкивом на штурвале 3. При падении груза шкив поворачивается по часовой стрелке и производит включение выключателя, соединенного с приводом.
Механизм привода, реле защиты и электромагниты включения и отключения размещены в металлическом сварном корпусе. Штурвал 3 диаметром 320 мм надет на четырехгранную ступицу вала привода вместе со шкивом для троса. Трос закреплен одним концом на шкиве, к другому концу троса подвешен груз.
Для смягчения ударов при падении груза внутри него установлена буферная пружина. Груз представляет собой набор съемных кольцевых гирь; вес груза может регулироваться в пределах от 18 до 55 кг и зависимости от количества гирь.
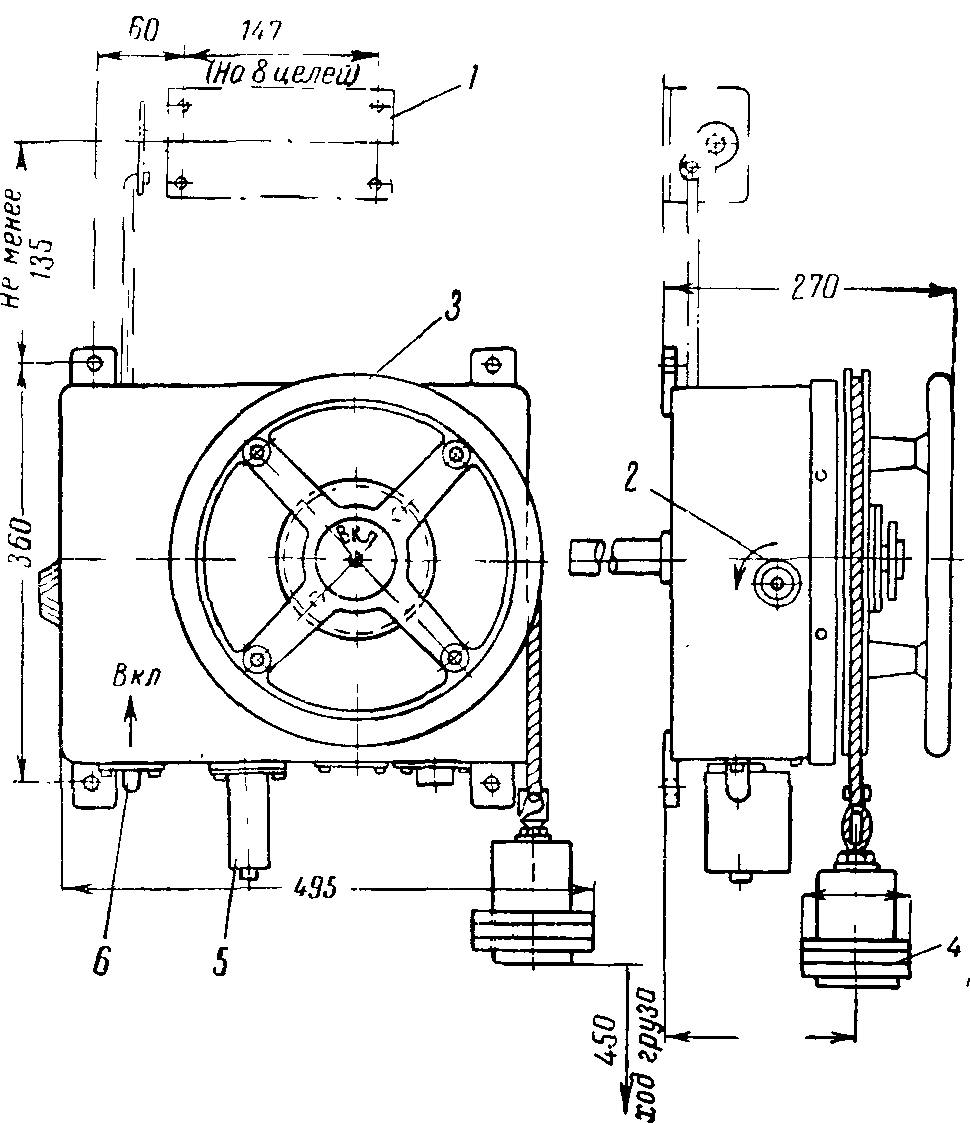
Рис. 5-1. Общий вид и габаритные размеры грузового привода типа ПГ-10.
1—блок-контакты; 2 — рукоятка; 3—маховик; 4—груз; 5—электромагнит дистанционного отключения; 6 — кнопка включения.
Необходимый вес груза зависит от типа выключателя и от кинематической схемы соединения привода с выключателем.
Корпус привода закрывается крышкой, состоящей из двух съемных частей: верхняя половина крышки закрывает механизм привода, при снятии втором половины крышки открывается доступ к электромагнитам.
Ручное управление приводом производится посредством штурвала 3, который служит также для подъема груза 4. Кнопка 6 служит для включения выключателя; рукоятка 2, служащая для отключения выключателя и для вывода АПВ, расположена в средней части с левой стороны привода. Блок-контакты 1 типа КСА на 4, 6 и 8 цепей устанавливаются на стене над приводом.
Приводы типа ПГ-10 изготовляются в разных вариантах в зависимости от типа встроенных реле и отключающих электромагнитов. На рис. 5-2 представлена кинематическая схема привода.
б) Включение выключателя.
Прежде чем включить выключатель, необходимо поднять груз до его верхнего предельного положения. Это выполняется путем поворота штурвала против часовой стрелки. При повороте штурвала поворачивается рычаг 12 и в конечном положении рычаг запирается и удерживается роликом устройства 6 в заведенном состоянии. Включение выключателя может быть произведено либо вручную путем нажатия кнопки 30 оператором, либо дистанционно путем подачи импульса тока на катушку включающего электромагнита 31.
В том и в другом случае освобождается рычаг 12 от удерживающего устройства 6 и под действием груза, вращаясь по часовой стрелке, захватывает защелкой 8 рычаг 19 (на рис. 5-2 рычаг 19 показан во включенном положении выключателя, при отключенном положении этот рычаг повернут на 180). Так как рычаг 19 жестко связан с валом привода 16, то при повороте рычага 19 вместе с ним поворачивается и вал привода. Рычаг 19 защелкой 8 доводится до запирания его неподвижной защелкой 20. Для ограничения поворота рычага 12 служит буфер 24.
В начале поворота по часовой стрелке рычаг 12 производит завод серповидного рычага 4 при помощи ролика 9.
Этот рычаг в заведенном положении защелкивается роликом удерживающей стойки 17, и тем самым привод подготовлен на отключение выключателя.
в) Отключение выключателя.
Отключение выключателя может производиться либо вручную путем поворота ручки 32, либо дистанционно посредством электромагнита отключения, либо от реле защиты. Во всех этих случаях происходит воздействие на релейно-отключающий механизм. При ручном отключении в начале поворота ручки 32 конец рычага 5, поднимаясь вверх, выводится из зацепления с роликом рычага 15 и тем самым блокирует действие АПВ.
При дальнейшем повороте ручки ОТКЛ через механизм отключения 28 происходит поворот валика 21, планка которого нажимает на удерживающую стойку 17 и освобождает планку серповидного рычага 4. Освобожденный рычаг 4 ударяет по нижнему концу защелки 20, чем освобождает рычаг 19 и вал 16. После этого вал 16 под воздействием пружин выключателя свободно поворачивается и тем самым не препятствует отключению выключателя.
Дистанционное отключение выключателя производится при подаче импульса тока в электромагнит 26, вследствие чего втягивается сердечник этого электромагнита и через механизм отключения 28 поворачивается валик 21. В результате этого освобождается серповидный рычаг 4, который при своем падении производит отключение выключателя так же, как описано выше.
г) Отключение выключателя с мгновенным механическим АПВ, Когда выключатель отключается от действия защиты, происходит мгновенное АПВ. При действии защиты посылается импульс тока в катушку электромагнита 25 или 26, в результате чего сердечник катушки штоком поднимает планку 22, жестко соединенную с валиком 21. При этом валик 21 поворачивается в опорах 23 и воздействует на стойку 17, чем освобождает серповидный рычаг 4.

Рис. 5-2. Схема механизма привода типа ПГ-10.
1—блок-контакты; 2 — тяга; 3 — ось; 4—серповидный рычаг; 5—рычаг; 6 — удерживающее устройство; 7 —валик; 5 —защелка; 9 — ролик; 10 — рычаг; 11 —механизм завода; 12 — рычаг; 13 — рычаг; 14 — удерживающая планка; 15 — рычаг с роликом и сектором; 16 — вал привода; 17—удерживающая стойка; 18 — пружина, ускоряющая движение серповидного рычага 4; 19 — рычаг; 20 — защелка; 21 — валик; 22 — отключающая планка; 23 — опора валика; 24 — буфер; 25 и 26 —электромагниты отключения от реле защиты; 27—электромагнит дистанционного отключения; 28 — механизм отключения; 29 — блок-контакт; 30 — кнопка включения; 31 — включающий электромагнит; 32—ручка отключения и вывода механического АПВ; 33 —39—регулировочные элементы.
Освобожденным серповидный рычаг 4 падает и ударяет о нижнюю часть защелки 20. чем производит расцепление рычага 19 и освобождает вал привода 16, в результате чего выключатель отключается. В это время вал привода 16 поворачивается против часовой стрелки и с ним поворачиваются рычаг 19 и рычаг с роликом 15. Ролик ударяет по рычагу 5, воздействует на удерживающее устройство 6, в результате чего освобождается удерживающийся рычаг 12. Рычаг 12 под действием груза поворачивается по часовой стрелке и захватывает защелкой 8 рычаг 19, увлекает его за собой и поворачивает вал 16. Таким образом, происходит включение выключателя по циклу мгновенного механического АПВ (без выдержки времени).
д) Действие механизма свободного расцепления и вывод механического АПВ.
Как уже было описано выше, при повороте рычага 12 одновременно с ним производится завод серповидного рычага 4 посредством ролика 9, при чем полный завод рычага 4 производится в начальной стадии поворота рычага 12 по часовой стрелке на угол около 40°. При повороте рычага 12 на угол 140° рычаг 4 может свободно падать при действии защиты и при падении он расцепляет рычаг и тем самым не допускает включения выключателя.
Если выключатель включен, а груз спущен, тогда серповидный рычаг 4 при его срабатывании, т. е. при падении, ударяет своим концом по свободным концам защелок 8 и 20 и тем самым производит расцепление рычага 19, т. е. отключает выключатель. Из рассмотренного видно, что механизм свободного расцепления привода действует на большой части хода подвижных контактов выключателя, не давая ему включиться, если в цепи авария.
В эксплуатации иногда бывает необходимость временно вывести механическое АПВ. В этом случае следует повернуть ручку 32 против часовой стрелки до фиксированного положения ВЫВОД АПВ. В результате этого при отключении выключателя и поворота вала 16 и рычага 15 против часовой стрелки ролик рычага 15 пройдет под поднятым рычагом 5 и не воздействует на механизм АПВ.
е) Электрическое-релейное АПВ и включение резерва АБР.
Электрическая релейная схема для грузового привода может быть осуществлена по таким же типовым схемам АПВ, как и для электромагнитных приводов, но при этом в приводе необходимо вывести механическое АПВ, причем импульс тока на включение от релейной схемы АПВ должен подаваться на катушку 31 дистанционного включения. Для использования привода при автоматическом включении резерва АВР может быть применена механическая или электрическая схема.
При механическом включении резерва достаточно воздействовать на кнопку привода 30 ВКЛ посредством командной тяги, действующей от вала рядом установленного привода рабочего выключателя. При электрическом включении резерва необходимо в первую очередь вывести механическое АПВ в самом приводе и после этого подать импульс тока через блок-контакты привода рабочего выключателя на катушку включения 31 привода резервного выключателя.
ж) Регулировка механизма привода.
Для правильной и безотказной работы привода весьма важным является взаимодействие рычагов механизма. Чтобы проверить правильность работы механизма, необходимо рычаг 12 (рис. 5-2) установить в положение, соответствующее опущенному грузу. Рычаг с роликом 15 устанавливается так, чтобы этот рычаг в своем нижнем положении имел зазор 10—15 мм при встрече с опускаемым рычагом 5. После этого включается выключатель и проверяется зазор между вышеуказанными рычагами. При необходимости дальнейшую регулировку механизма привода следует проводить регулировочными элементами от 33 до 39, показанными на рис. 5-2.
Для надежного удержания груза в верхнем заведенном положении и надежного срабатывания привода при включении служит винт 33. Так как рычаг 12 может западать за ролик механизма 6, то глубина западания должна быть приблизительно равна 1 мм. При таком положении электромагнит включения должен срабатывать при напряжении 90—110% от его номинального напряжения на зажимах.
Для регулировки завода серповидного рычага 4 роликом 9 предусмотрен винт 34. Он должен находиться в таком положении, чтобы при включении зазор между роликом стойки 17 и планкой 14 в момент подъема составлял порядка 3—5 мм. При этом серповидный рычаг 4 не должен упираться в верхнюю стенку корпуса.
Для регулирования западания планки 14 за ролик стойки 17 служит винт 35. Винтом должно быть отрегулировано такое западание, чтобы легко можно было производить отключение и надежно удерживался серповидный рычаг на ролике.
Винты 36 и 37 служат для облегчения работы отключающих электромагнитов. После момента отключения приводом сердечники электромагнитов должны иметь свободный ход не более 1,5 мм.
Для регулировки зацепления сегментообразной защелки 8 за рычаг 19 при включении служит винт 38, при этом величина захвата должна быть 5—6 мм.
Для регулировки механизма отключения служит гайка 39. Тяга подбирается такой длины, чтобы при отключении привода вручную или электромагнитом 27 диск блок-контакта 29 освобождается свободно. При выводе АПВ защелка не должна отходить.
з) Основные технические данные привода ПГ-10.
Как отмечалось выше, привод ПГ-10 имеет механическое АПВ. Это АПВ может быть отрегулировано в пределах поворота вала привода от 50 до 160о за счет сектора рычага 15, на котором имеется 18 положений уставок через каждые 5°.
Включающий груз имеет ход по вертикальной оси 450 мм. Поднятие груза может быть осуществлено вручную оператором как при отключенном, так и при включенном выключателе. Последнее действие бывает необходимо для АПВ. Вес привода вместе с грузом составляет около 90 кг.