- Другие ограничения при наблюдении
Беннет и др. [23] установили, что увеличение не должно превышать предела, при котором элемент разрешения имеет угловой размер для глаза, равный 3' (~1 мрад). Этот вывод подтвержден Хемингуэем и Эриксоном [30] и согласуется с исследованиями, описанными в гл. 4.
Вильямс и Бороу [7] не обнаружили ухудшения характеристик поиска при движении картины по экрану индикатора со скоростью 0—8 град/с. При скорости 16 град/с время поиска увеличивается

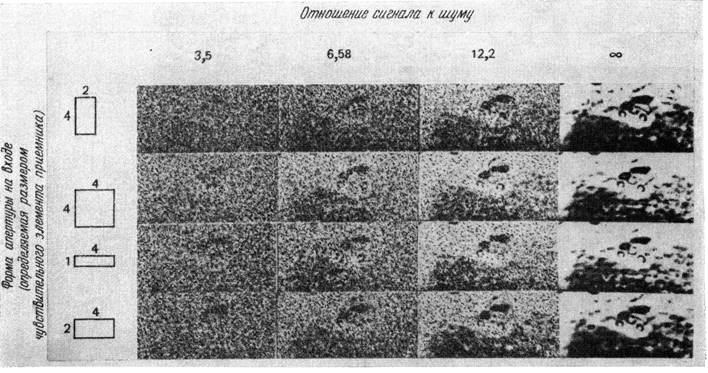
Фиг, 10.24, Результаты обработки теплового изображения при числе строк на высоту кадра, равном 125, и квадратной
апертуре луча монитора со стороной, равной ширине строки.


Фиг. 10.25. Результаты обработки теплового изображения при числе строк на высоту кадра, равном 31, и квадратной
апертуре луча монитора со стороной, равной ширине строки.

Фиг. 10,26. Исходное термографическое изображение.
ГЛАВА 10
на ~25%, а при 31 град/с — на 100%. Они установили также, что горизонтальное движение приводит к меньшему ухудшению видения, чем вертикальное.
Вильямс и Бороу [7] определили, что разброс по отдельным наблюдателям в способности извлекать информацию составляет 4:1. Аналогично Торнтон и др. [32] установили, что точность оценки изображений, полнота восприятия и время поиска для различных наблюдателей варьируют в отношении 5:1. Эриксон [31] обнаружил, что время поиска уменьшается при повышении периферической остроты зрения. Беннет и др. [23] нашли, что способность наблюдателей оценивать изображение объекта можно улучшить в 3 раза, если просто заранее сообщить им, что определенный объект (один из возможных) имеется на картине.
Жиклаи [33] создавал быстро меняющуюся последовательность телевизионных изображений, содержащих только вполне определенные объекты, и установил, что в идеальных условиях можно различить от трех до пяти объектов или символов в секунду.
- Оптимизация параметров системы
Для экономически эффективного проектирования необходимо обеспечивать только требуемые характеристики. Поэтому следует представлять себе, как взаимосвязаны в системе различные ограничения наблюдения. В качестве примера рассмотрим простую систему, имеющую квадратное поле зрения и растр с примыкающими друг к другу строками без пропусков и перекрытий. Предположим, что для обеспечения эффективности поиска по условиям ограничения размера экрана, восприятия мельканий оптимального коэффициента окружающего фона или по другим причинам мы выбрали угловые размеры экрана А' X А' (мрад2). Предположим далее, что из общего рассмотрения качества изображения мы выбрали угловое увеличение М, которое обеспечивает требуемую эффективность совокупности система — глаз. Тогда приемное устройство будет иметь квадратное поле зрения со стороной А = = A'lM (мрад).
Предположим теперь, что требуется обеспечить определенную вероятность различения объекта с некоторым критическим линейным размером в метрах на наклонной дальности R (км). Угловой критический размер объекта 0С (мрад) будет равен отношению линейного критического размера объекта в метрах к дальности в километрах. Требуемая вероятность различения определяет примерное число строк растра (или элементов разрешения для систем без выборки) в угловом размере 0С; пусть это число будет L. Тогда одна строка должна иметь угловой размер §JL (мрад). Требуемая вероятность различения определяет также (правда, в менее явном виде) некоторый минимальный угловой критический
размер объекта для глаза, скажем 0с, который согласуется с РСВ глаза и спектром пространственных частот объекта. Параметры 0С и 0с связаны соотношением
![]() (10.28)
(10.28)
но в то же время
![]() (10.29)
(10.29)
поэтому
![]() (10.30)
(10.30)
Таким образом, поле зрения приемного устройства определяется выбором углового размера экрана, обеспечивающего эффективный поиск, и требованиями по различению. Например, реальные цифры могут быть следующими: А' = 160 мрад (~9°), 0С = = 1 мрад (3 м/3 км), 0с = 4 мрад (~12'). Эти значения дают поле зрения А = 160-1/4 = 40 мрад = 2,3° и увеличение, равное 4. Если мы выберем Рра3л = 50%, подходящим значением числа строк будет L = 4. Тогда угловой размер одной строки составит 0C/L = 0,25 мрад и общее число каналов будет равно 40 мрад/0,25 мрад = 160. Наконец, для эффективной дистанции наблюдения экрана D (м) и для малых значений А' ширина экрана W (мм) должна быть равна W « DA'm. При размещении экрана индикатора в кабине оператора дистанция D может быть равной 0,6 м, так что для нашего примера W составит 0,6* 160 = 96 мм л; « 10 см.
Многие применяемые в настоящее время системы тепловидения не вполне оптимальны, по крайней мере в том отношении, что размер экрана, угловой размер строки, поле зрения и увеличение обычно выбираются независимо. Например, поле зрения может быть выбрано из условия перекрытия определенного участка земной поверхности с определенной высоты, в то время как увеличение выбирается независимо из условия эффективного разрешения. Тогда значительная часть экрана не будет использоваться, поскольку наблюдатель не сможет охватить всю информацию.
Опасность спроектировать систему с завышенными характеристиками всегда довольно велика, поскольку технически возможно обеспечить более высокое отношение поля зрения к разрешению по сравнению с тем, которое наблюдатель сможет эффективно использовать. В приведенном выше численном примере число строк 160 на все поле зрения мало для современных систем FLIR с высокими характеристиками. В результате характеристики FLIR обычно ограничиваются не возможностями прибора, а возможностями оператора.
ЛИТЕРАТУРА
- Biberman L. М., ed., Perception of Displayed Information, Plenum, 1973.
- Enoch J. М., Effect of the Size of a Complex Display Upon Visual Search,. JOS A, 49, 280-286 (1959).
- Ford A., White С. Т., Lichtenstein М., Analysis of Eye Movements During Free Search, JOS A, 49, 287—292 (1959).
- Baker C. A., Morris D. F., Steedman W. C., Target Recognition on Complex Displays, Human Factors, 2, 51 — 61 (1960).
- White С. Т., Ocular Behavior in Visual Search, Applied Optics, 3, 569— 570 (1964).
- Krendel E. S., Wodinsky J., Search in an Unstructured Visual Field, JOSAy 50, 562-568 (1960).
- Williams L. G., Borow M. S., The Effect of Rate and Direction of Display Movement Upon Visual Search, Human Factors, 5, 139 — 146 (1963).
- Williams L. G., Target Conspicuity and Visual Search, Human Factorsv
- 80-92 (1966).
- Bloomfield J. R., Visual Search in Complex Fields, Human Factors, 14,. 139—148 (1972).
- Peterson H. E., Dugas D. J., The Relative Importance of Contrast and Motion in Visual Detection, Human Factors, 14, 207—216 (1972).
- Johnson J., Analysis of Image Forming Systems, Proceedings of the Image- Intensifier Symposium, U. S. Army Engineering Research Development Laboratories, Fort Belvoir, Virginia, October 1958) (краткое изложениесм. [1]).
- Rosell F. A., Willson R. H., Recent Psychophysical Experiments and the Display Signal-to-Noise Ratio Concept (гл. 5 работы [1]).
- Williams L. G., Honeywell, Inc., Systems and Research Division, Minneapolis, Minnesota (частное сообщение).
- Blackwell H. R., Contrast Thresholds of the Human Eye, JOS A, 36, 624— 643 (1946).
- Coltman J. W., Anderson A. E., Noise Limitations to Resolving Power in Electronic Imaging, Proc. IRE, 858—865 (1960).
- Schade О. H., Sr., An Evaluation of Photographic Image Quality and Resolving Power, JSMPTE, 73, 81 —119 (1964).
- Bernstein B. R., Detection Performance in a Simulated Real-Time Airborne- Reconnaissance Mission, Human Factors, 13, 1—9 (1971).
- Collucio T. L., MacLeod S., Maier J. J., Effect of Image Contrast and Resolution on Photointerpreter Target Detection and Identification, JOS A, 59, 478-481 (1969).
- Hollanda P. A., Harabedian A., The Informative Value of Line-Scan Images as a Function of Image Contrast and the Number of Scans per Scene- Object (Ground-Level, non-simulated imagery), Perkin-Elmer Report № 10032, Perkin-Elmer Optical Technology Division, Danbury, Connecticut, 1970.
- Greening C. P., Wyman M. J., Experimental Evaluation of a Visual Detection Model, Human Factors, 12, 435—445 (1970).
- Bailey H. H., Target Detection Through Visual Recognition: A Quantitative Model, Rand Corporation Memorandum RM-6158-PR, Rand Corporation, Santa Monica, California, 1970.
- Barnard T. W., Image Evaluation by Means of Target Recognition, Phot- Sci. and Eng., 16, 144—150 (1972); An Image Evaluation Method, A Symposium on Sampled Images, Perkin-Elmer Corporation, Norwalk, Connecticut, 1971.
- Bennett C. A., Winterstein S. H., Kent R. E., Image Quality and Target Recognition, Human Factors, 9, 5—32 (1967).
- Perception of Displayed Information, L. M. Biberman, ed., Plenum, 1973, Ch. 3 (Results of Boeing image evaluation studies).
- Johnston D. М., Target Recognition on TV as a Function of Horizontal Resolution and Shades of Gray, Human Factors, 10, 201—209 (1968).
- Scott F., Hollanda P. A., Harabedian A., The Informative Value of Sampled Images as a Function of the Number of Scans per Scene Object, Phot. Sci. and Eng., 14, 21—27 (1970).
- Gaven J. V., Jr., Tavitian J., Harabedian A., The Informative Value of Sampled Images as a Function of the Number of Gray Levels Used in Encoding the Images, Phot. Sci. and Eng., 14, 16—20 (1970).
- Steedman W. C., Baker C. A., Target Size and Visual Recognition, Human Factors, 2, 120—127 (1960).
- Hollanda P. A., Scott F., Harabedian A,, The Informative Value of Sampled Images as a Function of the Number of Scans per Scene Object and the Signal-to-Noise Ratio, Phot. Sci. and Eng., 14, 407—412 (1970).
- Hemingway C., Erickson B. A., Relative Effects of Raster Scan Lines and Image Subtense on Symbol Legibility on Television, Human Factors,
- 331—338 (1969).
- Erickson R. A., Relation Between Visual Search Time and Peripheral Visual Acuity, Human Factors, 6, 165—177 (1964).
- Thornton C. L., Barrett G. V., Davis J. A., Field Dependence and Target Identification, Human Factors, 10, 493—496 (1968).
- Sziklai G. C., Some Studies in the Speed of Visual Perception, IRE Trans. Info. Thry., IT-2, 125—128 (1956).