- Вероятность обнаружения
Вероятность обнаружения объектов простой геометрической формы на однородном фоне в присутствии случайных шумов рассматривалась в гл. 4. Выводы, сделанные на основе этого рассмотрения, таковы, что визуальная система работает, как бы вычисляя отношение сигнала к шуму и сравнивая его с пороговым значением отношения сигнала к шуму как критерием важности полученного сигнала. Имеется значительное количество данных, подтверждающих эту теорию в различных условиях наблюдения. В условиях ограничения видимости квантовыми шумами или контрастом теория подтверждается данными Блэкуэлла [14], а при наличии аддитивных шумов — данными Кольтмана и Андерсона [15], Шаде [16], а также Розелла и Вильсона [121. Фактически нет опубликованных данных о зависимости условий обнаружения объектов непростой формы на неравномерных фонах от отношения сигнала к шуму.
В гл. 4 указывалось, что вероятность обнаружения возрастает с увеличением времени наблюдения, углового размера объекта и контраста. Испытания Бернштейна [17!, Колюччио и др. [181, Холланда и Харабедиана [19], а также Грининга и Уаймана {20], проведенные с реальными объектами в натурных условиях, показали, что процент обнаруживаемых объектов действительно возрастает с увеличением контраста. Бернштейн [17], например, установил, что изображения на экране электронно-лучевой трубки автомашин и людей должны иметь контраст CJL (LT — LB)/L в, равный 90%, чтобы обеспечить максимально возможную вероятность различения.
Кроме того, Бернштейн [17] установил, что разрешение влияет на вероятность обнаружения только в той мере, в какой оно изменяет отношение сигнала к шуму или контраст объекта. Однако Колюччио и др. [181 нашли, что условия обнаружения улучшаются с ростом разрешения И, определяемого числом разрешаемых штрихов на размер объекта, причем улучшение описывается формулой
Улучшение = Кг lg K2R, (10.24)
где К! и К2 — эмпирические константы.
Бэйли [211, используя в качестве отправкой точки описанную выше теорию поиска, рассмотрел большое число работ, из которых ясно, что полная вероятность обнаружения Р0ст является функцией помех. Если па картине с помехами, характеризуемой по
угловым размерам телесным углом £2S, нужно отыскать объект с угловым размером QT за время I, то в соответствии с выводами Бэйли полная вероятность обнаружения равна
![]() (10.25)
(10.25)
где Роон/виз — вероятность того, что наблюдатель обнаружит объект, если он смотрит прямо на него, а К — эмпирический коэффициент помех, пропорциональный плотности ложных объектов в картине. Типичные значения К по опубликованным данным, рассмотренным Бэйли, заключены в диапазоне 0,01—0,1. Эксперименты Бэйкера и др. [4], а также Вильямса и Бороу [71 подтверждают эту теорию.
10.7. Вероятности классификации и различения
Насколько известно автору, до сих пор не опубликованы данные о качестве изображения, необходимом для перехода от обнаружения к классификации. Это, однако, не свидетельствует о несущественности классификации как задачи интерпретации изображения. Классификация особенно важна в военных приложениях. Например, обычными ситуациями являются такие, когда известно, что в охраняемом секторе не предполагается наличие своих военных машин или что в определенном секторе должен появиться самолет противника. В этих случаях достаточно только обнаружить объект и классифицировать его как военную машину или самолет, чтобы открыть огонь.
Очень подробно исследовалось влияние изменения какого- либо одного из параметров, характеризующего качество изображения, на вероятность различения простых, представляющих практический интерес объектов. Барнард [221 определил вероятность различения случайным образом ориентированных колец Ландольта и звездообразных мир, в которых отсутствовал один луч, на фоне аддитивных гауссовых шумов. Он нашел, что результаты точно описываются с помощью модели, основанной на предположении, что система глаз — мозг работает, как оптимальный фильтр. Этот вывод подтверждает представление некоторых специалистов в области физиологии зрительного восприятия, чго система глаз — мозг состоит из набора статистически независимых узкополосных фильтров.
Все исследователи сходятся во мнении, что улучшение разрешающей способности прибора наблюдения улучшает характеристики различения и опознавания. Бэйли [211 полагает, что вероятность различения Рразл связана с наименьшим числом элементов разрешения, содержащимся в наименьшем размере объекта и определенном с 90%-ной вероятностью. Джонсон [111 указал,
что для уверенного различения число разрешаемых штрихов на критический размер объекта должно составлять 4±0,8.
Беннет и др. [23] установили, что при наблюдении с расстояния 380 мм характеристики различения улучшаются с улучшением разрешения до ~0,25 мрад; ниже этого уровня существенного улучшения различения не наблюдается. Грининг и Уаймен [20] рекомендуют следующее соотношение:
![]() (10.26)
(10.26)
где rs — разрешение приемного устройства, включая глаз, мрад2; г — определенное эмпирическим путем разрешение для данного объекта, мрад2; т = 1 при rjr >1ит = 2 при rjr 1, причем
![]() QT — телесный угол, под которым виден объект;
QT — телесный угол, под которым виден объект;
Nr — определенное эмпирическим путем число элементов разрешения на объекте.
Их эксперименты в натурных условиях показали, что число элементов разрешения, требуемое для различения с уверенностью 90%, меняется от 3 до 20 в зависимости от сложности объекта. Исследователи фирмы «Боинг» [24] установили, что эффективность извлечения фотографической информации повышается приблизительно пропорционально площади, ограниченной кривой МПФ, и пропорционально Ne для тех типичных видов МПФ, которые они исследовали.
Наиболее надежные результаты в теории поиска получены при исследовании требуемых для различения и опознавания числа пространственных выборок или строк растра, укладывающихся в размер изображения объекта. Результаты Джонстона [25] по исследованию вероятности различения Рразл телевизионных изображений автомотосредств в функции числа строк растра L, укладывающихся в изображении объекта, достаточно точно описываются формулой
(10.27)
где 7 L 13.![]()
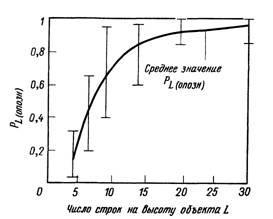
Ряд натурных исследований, проведенных с системами тепловидения, показали, что для обеспечения 50%-ной вероятности Рразл необходимо иметь 4 ± 1 строк, укладывающихся в размер изображения объекта, а для обеспечения 90%-ной вероятности 6+1 строк. Скотт и др. [26] формировали изображения макетов военных автомашин с выборкой по вертикали при числе строк, укладывающихся по высоте изображения объектов 4, 6, 9, 13, 5, 20 и 30. Наблюдателям предлагалось отождествлять изображения автомашин с аналогичными изображениями без выборки и затем вычислялись вероятности правильного различения объектов. Эти результаты приведены на фиг. 10.8. Аналогичные исследования
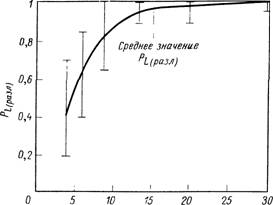
Число строп на Высоту объекта
Фиг. 10.8. Продолы изменения вероятности различения в зависимости от числа строк, укладывающихся но высоте изображения объекта, для всех классов автомотосредств [26].
провели Холланда и Харабедиан [19], получив аналогичные результаты.
Гейвен и др. [27] исследовали особенности извлечения информации с помощью фотографий с выборкой с равными интервалами в обоих направлениях с величиной о гауссовой функции рассеяния, равной половине постоянной решетки. Они использовали значения числа строк сканирования на диагональ объекта, равные 22,1Г 33,1 и 49,6. Интенсивность изображения квантовалась примерно по равновероятным уровням от 1 до 7 бит (от 2 до 256 уровней). Определялась вероятность различения обработанных таким образом изображений в функции числа строк сканирования L и числа бит по интенсивности. Результаты представлены на фиг. 10.9 и 10.10. По данным этих исследований, не наблюдалось заметного улучшения характеристик па уровне выше 3 бит. С другой стороны, Джонстон [251, используя замкнутую телевизионную систему, не обнаружил заметной зависимости различения от градаций серой шкалы на экране телевизора для числа градаций от 5 до 9.
Стидмен и Бэйкер [281 исследовали зависимость различения объекта от его углового размера, используя круглые неподвижные фотографические изображения с угловыми диаметрами 4.6; 9,3; 13,9 и 17,7° при дистанции наблюдения 0,6 м. На каждом изображении было 184 объекта произвольной сложной формы из общего набора 557 объектов; 24 объекта подлежали различению; освещенность составляла 215 л к. Все объекты имели высокий контраст и были только слегка размыты. Результаты этих исследований

Фиг. 10.10. Кривые равной вероятности различения в функции уровня квантования и числа строк, укладывающихся в размер изображения объекта [27].

Фиг. 10.11. Процентное изменение времени поиска и процент ошибок различения в функции углового размера объекта [28].
--------- время; — — — — ошибки.
показали, что процентная ошибка различения и времени поиска относительно постоянны для угловых размеров, больших 12', и резко увеличиваются при угловых размерах, меньших 12'. На фиг. 10.11 показаны процентное изменение времени поиска и процент ошибок различения в функции максимального углового размера объекта.
- Вероятность опознавания
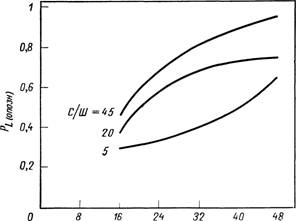
Холланда и др. [29] исследовали зависимость опознавания объектов от числа строк сканирования, укладывающихся в размер изображения объекта, и от отношения сигнала к шуму в точке. Они использовали 20 макетов бронетанковой техники и получали их изображение с помощью оптико-электронной системы. Число строк сканирования L, соответствующих высоте объекта, составляло 16, 32 и 48; к изображениям добавлялись гауссовы шумы, чтобы получить значения отношения сигнала к шуму 3, 5, 10, 20 и 45. Эти исследователи построили, в частности, кривые процента правильных опознаваний в функции отношения сигнала к шуму для различных значений числа строк L, а также кривые L в функции отношения сигнала к шуму для постоянных условий опознавания. Полученные ими зависимости вероятности опознавания Роиозн от числа строк сканирования и отношения сигнала к шуму представлены на фиг. 10.12—10.15. Основные выводы, сделанные в работе [291, следующие:
- Ропозн для наземных объектов военной техники является возрастающей функцией отношения сигнала к шуму вплоть до значений этого отношения, равного 15.
2- Ропозн Для изображений без шумов только на 5% выше, чем Ропозн при отношении сигнала к шуму 30.
- С увеличением отношения сигнала к шуму от 20 до бесконечности Ропозн возрастает максимум на 10%.
- При отношениях сигнала к шуму 2, 3 и 4 различия в качестве изображения пренебрежимо малы.
Ранее описанные эксперименты Скотта и др. [26] с изображениями, полученными при сканировании картины, позволили определить зависимость Р0позы от числа строк, укладывающихся по высоте изображения объекта (фиг. 10.16). Процентное увеличение правильного опознавания при L > 20 очень незначительное; вероятность 50% примерно соответствует значению L = 7. Изменения опозн при наблюдении под углом 45° и при наблюдении в надир показаны на фиг. 10.17.
По данным Хемингуэя и Эриксона [30], относящимся к вероятности опознавания типографских знаков произвольной формы на телевизионном экране в зависимости от углового размера зна-

Фиг. 10.9. Вероятность различения в функции уровня квантования и числа строк, укладывающихся в размер изображения объекта [27].
Число строк, укладывающихся в размер изображения: 1 — 49,6; 2—33,1; 3—22,1.
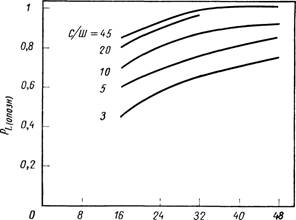
Фиг. 10.12. Вероятность опознавания различных военных автомотосредств в функции числа строк L, укладывающихся по высоте изображения объекта, для различных отношении сигнала к шуму С/Ш в точке [29].
Число строп на Высоту объекта L
Фиг. 10.13. Вероятность опознавания танков в функции числа строк L, укладывающихся по высоте изображения объекта, для различных отношений сигнала к шуму С/Ш в точке [29].
Число строп на Высоту объекта I

Фиг. 10.14. Вероятность опознавания различных военных автомотосредств в функции отношения сигнала к шуму С/Ш в точке для различного числа строк L, укладывающихся по высоте изображения объекта [29].
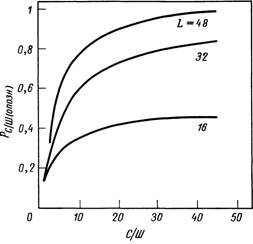
Фиг. 10.15. Вероятность опознавания танков в функции отношения сигнала к шуму С/Ш в точке для различного числа строк L, укладывающихся по высоте изображения объекта [29].
Фиг. 10.16. Пределы изменения вероятности опознавания в функции числа строк, укладывающихся по высоте изображения объекта, для всех классов автомотосредств [26].

Фиг. 10.17. Вероятность опознавания в функции числа строк, укладывающихся по высоте изображения объекта, для всех классов автомотосредств при наблюдении под углом 45° и в надир [26].
1 — наблюдение под углом 45°; 2 — наблюдение в надир.
ков 0С (мрад) и от числа строк телевизионного разложения, укладывающегося в изображении знака, вероятность опознавания достаточно точно описывается формулой
![]()