Глава 8 Типы тепловизионных систем
- Введение
Секретный характер большинства разработок систем тепловидения не позволяет широко обсуждать характеристики систем в открытой литературе. Немногочисленные публикации на эту тему относятся к термографической аппаратуре [1—7], системам FLIR для гражданского применения [8, 9] и для применения в в военных целях [10—12]. Кратко рассмотренная в гл. 1 система с одноэлементным приемником излучения является простейшей. Однако фундаментальные ограничения или современное состояние технологии изготовления приемников излучения могут не позволить создать систему такого типа с достаточной тепловой чувствительностью, и для повышения отношения сигнала к шуму на кадр и на элемент разрешения приходится увеличивать число чувствительных элементов.
При этом можно сохранить вид растра таким же, как для одноэлементного приемника, и вытянуть линейку чувствительных элементов горизонтально (в направлении сканирования), или применить одномерное сканирование, располагая линейку вертикально, или, наконец, скомбинировать оба способа. Некоторые возможные схемы показаны на фиг. 8.1. При увеличении числа чувствительных элементов приемника для каждого элемента требуется как минимум свой предусилитель, так что повышение чувствительности сопровождается увеличением сложности системы. Чтобы не слишком усложнить систему, можно применить метод последовательной обработки сигнала или коммутирование каналов, причем в обоих случаях дг-канальное устройство сводится к системе с одним видеоканалом.
Обычные системы тепловидения отличаются друг от друга по двум принципиальным признакам: способу разложения картины и способу обработки предварительно усиленных сигналов приемника излучения для получения изображения. Отличия в оптике, сканирующих устройствах, системах охлаждения и индикаторах не имеют фундаментального значения, если указанные части системы отвечают минимуму предъявляемых требований. Например,
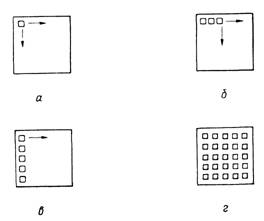
Фиг. 8.1. Возможные способы использования дискретных фотоприемных структур.
а — одноэлементный приемник излучения, сканирующий медленно по вертикали и быстро по горизонтали; б — последовательная линейка чувствительных элементов, сканирующая медленно по вертикали и быстро по горизонтали; в — параллельная линейка чувствительных элементов, сканирующая медленно по горизонтали и с чересстрочной разверткой по вертикали; г — двумерная мозаика чувствительных элементов без сканирования.
выбор системы охлаждения, работающей по циклу Стирлинга или циклу Виллюмье, может повлиять на стоимость, вес или надежность систем тепловидения в целом, но не дает оснований относить их к системам разного класса. Изменения же в типе сканирования или обработки сигнала, как мы увидим ниже, могут радикально изменить функционирование системы.
8.2. Последовательное и параллельное разложение картины
В дополнение к разделению сканирующих устройств на устройства со сканированием в параллельном и сходящемся пучках и на устройства с одномерным и двумерным сканированием можно разделить их на устройства с параллельным и последовательным разложением картины и соответствующей обработкой сигнала приемника. Различие между этими двумя типами сканирования показано на фиг. 8.2. При параллельном разложении картины чувствительные элементы приемника ориентированы перпендикулярно линии сканирования, как, например, в линейке чувствительных элементов приемника, используемых в системах с азимутальным сканированием. Выходные сигналы всех чувствительных элементов усиливаются, обрабатываются и подаются на индикатор одновременно, т. е. параллельно. При последовательном разложении картины [13] линейка чувствительных элементов ориентирована параллельно линии сканирования и каждая точка изображения сканируется всеми чувствительными элементами. Выходные сигналы элементов поступают в линию задержки и суммируются на выходе, при этом можно использовать сумму как единый сигнал (как это делается при использовании одноэлементного приемника), а можно направлять сигналы друг за другом на аналогичную линейку сканирующих индикаторных элементов.

Фиг. 8.2. Последовательное (а) и параллельное (б) сканирование.
I — усилитель; 2 — линия задержки; з — предусилители; 4 — чувствительные элементы приемника излучения; 5 — светодиоды.
Один тип сканирования может оказаться более выгодным, чем другой, в зависимости от таких факторов, как допустимые габаритные размеры приемного устройства, потребление мощности и соотношение эффективности характеристик системы и ее стоимости. Основное преимущество параллельной обработки сигнала заключается в том, что можно создать весьма компактные приемные устройства узкого назначения, используя сканирование в сходящемся пучке как для приемных, так и для индикаторных элементов с помощью одного зеркала. Это преимущество может быть утрачено при использовании системы общего назначения со сканированием в параллельном пучке. Основной недостаток параллельной обработки сигналов заключается в том, что разброс по обнаружительной способности Л* и чувствительности элементов приемника в линейке приводит к неравномерности изображения. Кроме того, прохождение по переменной составляющей паразитных сигналов, обусловленных различными значениями средней яркости участков картины, и их попадание на разные

Фиг. 8.3. Применение интегрирующей линии задержки при последовательном сканировании.
чувствительные элементы приемника излучения также вызывают неравномерность изображения.
Основные преимущества последовательного сканирования заключаются в том, что упомянутые выше неравномерности устраняются, поскольку разложение картины осуществляется на самом деле как бы одним чувствительным элементом и требуемое число чувствительных элементов диктуется не числом линий сканирования, как в системах с параллельным сканированием, а требуемой чувствительностью системы. Основной недостаток последовательного сканирования заключается в том, что приходится использовать сканирование в параллельном пучке, в результате чего оптическая система получается более сложной и громоздкой. Вид выражения для отношения сигнала к шуму системы FLIR с последовательным сканированием довольно трудно себе представить. Приводимый ниже вывод выражений для эффективной обнаружительной способности D* и отношения сигнала к шуму такой системы показывает, как в этом случае улучшаются характеристики, несмотря на неравномерность обнаружительной способности D* и чувствительности.
Интегрирующая линия задержки (фиг. 8.3) линейно суммирует сигналы чувствительных элементов приемника и извлекает корень квадратный из суммы квадратичных значений шумов. Эффективная обнаружительная способность D* и эффективное отношение сигнала к шуму «эквивалентного» одноэлементного приемника определяются комбинациями характеристик отдельных чувствительных элементов. Характеристики могут быть оптимизированы соответствующим выбором коэффициентов усиления каналов, ведущих в линию задержки.
- Сравнение характеристик систем FLIR
с параллельным и последовательным сканированием
Автор твердо убежден, что последовательное сканирование имеет преимущество над параллельным для большинства применений систем FLIR. Явное предпочтение, отдаваемое в этом разделе системам с последовательным сканированием, должно рассматриваться прежде всего как выражение этой точки зрения автора. Приведенные здесь утверждения основаны на современном состоянии технологии и прогнозируемых перспективах ее развития, однако они вполне могут оказаться опровергнутыми при радикальном усовершенствовании технологии изготовления приемников излучения.
С учетом преимуществ последовательного сканирования можно сделать следующие утверждения:
- Данный уровень объективных характеристик системы с последовательным сканированием может быть достигнут с числом чувствительных элементов приемника, составляющим не более этого числа в системе с параллельным сканированием.
- Если системы с параллельным и последовательным сканированием имеют одинаковые объективные характеристики, то система с последовательным сканированием обеспечит лучшее по субъективной оценке качество изображения.
Эти утверждения основаны главным образом на практике использования систем FLIR с последовательным и параллельным сканированием с одинаковыми объективными характеристиками, а также подкрепляются следующими техническими аргументами. Рассмотрим две системы FLIR с последовательным и параллельным сканированием, имеющие следующие одинаковые параметры:
- диаметр входного зрачка и оптическое пропускание;
- поле зрения;
- угловой размер чувствительного элемента приемника;
- частоту кадров;
- число активных строк на высоту картины;
- спектральный диапазон работы;
- зависимость и чувствительности от длины волны и электрической частоты.
Напомним, как указывалось в гл. 5, что эффективная тепловая чувствительность системы улучшается при уменьшении отношения![]() Необходимое для сравнения уравнение, определяющее ΔTдор, имеет вид
Необходимое для сравнения уравнение, определяющее ΔTдор, имеет вид
![]() (8.18)
(8.18)
где п — число чувствительных элементов приемника излучения.
Если сравнить две системы по отношению![]() при
при
условии, что семь указанных выше параметров одинаковы, то сравнение можно свести к рассмотрению показателя качества Q, определяемого уравнением
![]() (8.19)
(8.19)
Эталонная эквивалентная шумовая полоса А/н зависит от времени элемента разложения и шумовых характеристик системы приемник — предусилитель. Обнаружительная способность D* (кр) зависит от напряжения питания приемника, режима его работы (ОФ или какой-либо другой) эффективности применения охлаждаемых диафрагм и, наконец, экономических соображений при изготовлении приемников.
Ко времени написания книги (1974—1975 гг.) наиболее употребительные приемники излучения имели значительную составляющую шумов со спектром вида 1// в полосе частот, характерной для работы систем с параллельным сканированием. В то же время в полосе частот, типичной для систем с последовательным сканированием, вклад шумов 1// незначителен. Обеспечить функционирование чувствительных элементов приемника в режиме ОФ при числе элементов 200 гораздо труднее, чем в линейке с числом элементов 20. Формы охлаждаемых диафрагм на практике делают простыми; обычно это обыкновенные щели, а не набор отверстий. При параллельном сканировании щель длиннее и такая диафрагма менее эффективна, чем более короткая щель при последовательном сканировании.
В системе с параллельным сканированием, содержащей 200- элементный приемник излучения, для обеспечения стыковки приемника с устройством для охлаждения небольшой мощности приемник должен работать при низком напряжении питания, чтобы
уменьшить приток тепла. Таким образом, утрачивается возможность выбора напряжения питания с учетом условий оптимизации обнаружительной способности D* (кр). Перечисленные четыре фактора дают преимущества системе с последовательным сканированием, что в настоящее время позволяет обеспечить в такой системе с числом чувствительных элементов п = 20 такой же показатель качества Q, что и в системе с параллельным сканированием с числом чувствительных элементов приемника п = 200.
Второй аргумент в пользу последовательного сканирования — более высокое, субъективно воспринимаемое качество изображения, что связано главным образом с трудностью изготовления многоэлементных линеек для параллельного сканирования с одинаковыми элементами по обнаружительной способности и чувствительности. Если в системе с параллельным сканированием не предусмотрена в той или иной форме автоматическая регулировка чувствительности, неоднородность элементов по чувствительности приведет к большой паразитной разности сигналов от строки к строке из-за неодинакового восприятия однородного теплоизлучающего фона. С другой стороны, при использовании автоматической регулировки увеличивается разница в шумах чувствительных элементов приемника. Обе эти проблемы не возникают в системах с последовательным сканированием, поскольку в них неоднородности элементов по обнаружительной способности и чувствительности сглаживаются таким образом, что сохраняется максимально возможное отношение сигнала к шуму.