- Вращающиеся преломляющие клинья
Вращающийся преломляющий клин является одним из наиболее гибких элементов систем сканирования. Использование двух вращающихся клиньев позволяет получить линейную развертку, развертку по кругу, по эллипсу, розетку или спираль [8, 9]. Устройства сканирования с помощью клина следует применять в параллельном пучке лучей, поскольку в сходящихся пучках они вызывают сильные аберрации. Поэтому рассмотрим только случай применения клиньев в параллельном пучке лучей (фиг. 7.27). Пусть падающий луч характеризуется углом срх с компонентами (Pi* и ф1у, и пусть угол между лучом и осью в промежутке между клиньями равен ф2 с компонентами ф2зс и ф2у. Координаты (х, у) выбраны таким образом, что положительные углы соответствуют повороту вверх от оси. Для показанного на фигуре случая выходящий луч параллелен оси. Направление вращения клиньев вокруг оси считается положительным, если оно происходит против часовой стрелки; углы поворота обозначены 0Х и 02.
Движение луча, входящего в систему под углом ф1? при изменении углов 0Х и 02 можно описать, прослеживая обратный ход луча, вышедшего из системы под углом ф3, и используя известные законы преломления лучей в клине:
- Найти отклонение ф3 луча, выходящего из клина 2, в зависимости от поворота клина 02.
- Разделить угол ф2 на две компоненты, связанные с неподвижными и вращающимися координатами клина 1.
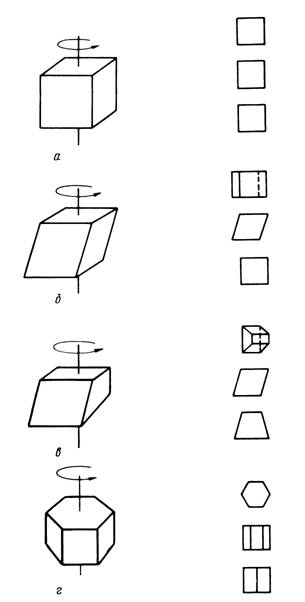
Фиг. 7.26. Вращающиеся преломляющие призмы. а — прогрессивная развертка; б — чересстрочная развертка 2:1; в — чересстрочная развертка 4: 1; г — чересстрочная развертка 3:1. Справа от каждой призмы приведены вид сверху, вид спереди и вид сбоку (сверху вниз).


Фиг. 7.28. К выводу выражения для угла отклонения луча.
а — неотклоненный луч срз — 0; б — луч, выходящий из вращающегося клина 2\ в — преобразование в невращающуюся систему координат; г — преобразование во вращающуюся систему координат клина 1\ д — луч, выходящий из клина J, во вращающейся системе координат; е — луч, выходящий из клина 1, в невращающейея системе координат.
Совместное использование полученных соотношений дает искомые общие уравнения для сканирующего устройства, состоящего из двух клиньев:

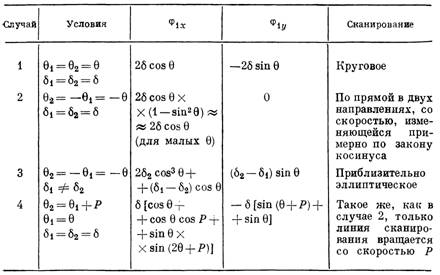
В табл. 7.2 приведены некоторые используемые на практике случаи сканирования с помощью пары вращающихся клиньев, имеющих постоянные и одинаковые по абсолютной величине скорости вращения. Недостатком систем этого типа при сканировании по линейному закону является более низкий, чем в других системах, коэффициент использования развертки из-за изменения скорости по синусоидальному закону. Покадровая и построчная регистрация требует также высокого постоянства угловой скорости вращения клиньев. При использовании зубчатых передач люфт в них и в связи с этим износ зубьев представляют серьезную проблему.
Таблица 7.2
Четыре возможных случая сканирования с помощью пары вращающихся клиньев