- Основы получения теплового изображения
Основные составляющие процесса получения теплового изображения показаны схематически на фиг. 1.1. Эти составляющие очевидны, но недостаточно точный анализ их влияния на процесс в целом может привести к серьезным ошибкам при проектировании, поэтому вкратце остановимся на них.
Чтобы обнаружить, а затем и опознать объект, он должен отличаться по температуре от фона на достаточную величину, которая позволила бы отделить его от других вариаций фона. Слой атмосферы, через который ведется наблюдение, не должен сильно рассеивать и ослаблять этот сигнал. Оператор должен иметь возможность осуществлять эффективный поиск, знать, что он должен искать, и ориентировать приемное устройство в соответствующем направлении. Приемное устройство должно собирать излучение с помощью оптической системы и преобразовывать его в электрический сигнал с достаточно высоким отношением сигнала к шуму с помощью приемника излучения, работающего в соответствующем спектральном диапазоне. Этот электрический сигнал должен затем вновь преобразовываться в оптический сигнал на индикаторном устройстве.
На заключительной стадии оператор должен иметь возможность оптимизировать извлечение визуальной информации, регулируя видеоусиление и яркость. Весь процесс преобразования инфракрасного изображения в видимое изображение должен происходить таким образом, чтобы восприятие контуров, ориентации, контраста и деталей объекта было сохранено или улучшено и чтобы не появлялись ложные сигналы и дополнительные шумы. Наблюдатель должен быть опытным и тренированным, иметь хорошее зрение и не отвлекаться от основной задачи при наблюдении.
На фиг. 1.2 приведена блок-схема типичной сканирующей системы тепловидения, показывающая основные функции ее элементов. В конкретных системах отдельные функции могут быть объединены или исключены, причем существует много различных способов реализации этих функций. На фиг. 1.3 показан один из возможных вариантов сканирующей системы FLIR.
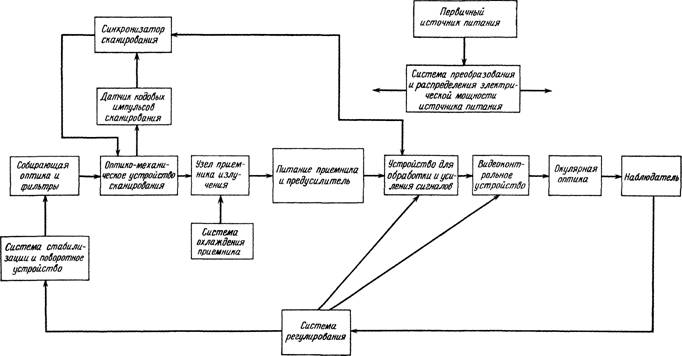
Фиг. 1.2. Блок-схема сканирующей системы тепловидения.

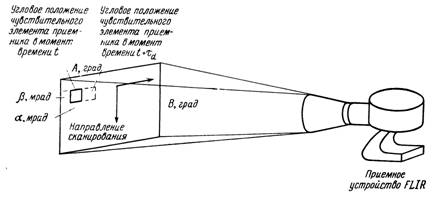
Фиг. 1.3. Упрощенная система сканирования по двум осям с одноэлементным приемником излучения.
Оптическая система собирает излучение картины и осуществляет спектральную и пространственную фильтрацию и фокусировку излучения, создавая изображение картины в фокальной плоскости, где расположен небольшой чувствительный элемент одноэлементного приемника излучения. Оптико-механическая система сканирования, состоящая из двух зеркал, одно из которых качается вокруг вертикальной оси, а другое — вокруг горизонтальной оси, расположена между объективом и приемником излучения. Пучок лучей от объекта, падающий на приемник, перемещается при прокачивании зеркал, образуя в пространстве объектов растр телевизионного типа, как показано на фиг. 1.3. Этот процесс последовательного сканирования называется разложением картины.
Поступающее от наблюдаемой картины электромагнитное излучение оказывает на приемник возмущающее воздействие, которое обычно пропорционально энергии излучения. Характер возмущения зависит от типа приемника и может проявляться в разделении носителей заряда, появлении фототока или изменении сопротивления. Обычно падающее излучение вызывает появление напряжения на нагрузке, и двумерное распределение яркости в пространстве объектов в результате сканирования преобразуется в одномерное распределение напряжения. Приемник инфракрасного излучения в определенной совокупности рабочих условий характеризуется двумя параметрами — чувствительностью R и удельной обнаружительной способностью. Чувствительность выражается как отношение сигнала приемника на выходе в вольтах к сигналу на входе в ваттах. Удельная обнаружительная способность представляет собой приведенное к единичной площади приемника излучения и единичной полосе частот отношение сигнала к шуму на выходе приемника для сигнала на входе, равного 1 Вт.
Эти два параметра зависят от частоты электрического сигнала /, Гц; длины волны оптического излучения X, мкм; площади приемника излучения Ad, см2; эквивалентной шумовой полосы Д/, Гц; среднеквадратичной величины напряжения шумов в полосе Д/ Fn, В; сигнала приемника в функции длины волны оптического излучения и частоты электрического сигнала Vs (X, /), В; спектрального распределения освещенности на приемнике Н, Вт/(см2*мкм).
Чувствительность и удельная обнаружительная способность определяются [3] по формулам

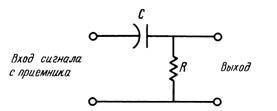
Фиг. 1.4. Схема связи по переменной составляющей сигнала.
Если наблюдение ведется на земных фонах, то, как будет показано в гл. 2, радиационные контрасты очень малы. Соответствующие контрасты, выраженные в напряжении сигнала, также малы, так что, если эти напряжения линейно преобразуются в оптические сигналы на индикаторе, наблюдатели будут испытывать трудности в обнаружении и опознавании объектов из-за низких значений контраста в изображении. Обычно контраст повышается за счет передачи от приемника излучения к предусилителю только переменной составляющей сигнала. Этим устраняется постоянная составляющая сигнала от фона. Простейшая возможная схема связи по переменной составляющей сигнала показана на фиг. 1.4. Эта схема не пропускает постоянную составляющую сигнала, т. е. через нее проходят только изменения сигнала относительно его среднего значения.
Сканирование в индикаторном устройстве должно быть строго синхронизировано со сканированием картины, так что индикатор и зеркала сканирующей системы управляются одним синхронизатором. Например, если индикатор — электронно-лучевая трубка, то синхронизирующие импульсы управляют схемами горизонтального и вертикального отклонений электронного луча.
Любую сканирующую систему тепловидения можно описать при помощи нескольких основных параметров. Фоточувствительный элемент приемника обычно имеет прямоугольную форму с размерами а по горизонтали и Ъ по вертикали (в сантиметрах). Угловые размеры фоточувствительного элемента приемника, работающего с оптикой, имеющей эффективное фокусное расстояние г) / (в сантиметрах), при небольших размерах приемника равны а = а/f и Р = blf (в радианах). Угловые размеры обычно выражаются в миллирадианах (10~3 рад). Угловые размеры области в пространстве объектов, в пределах которой объекты изображаются системой, называются полем зрения приемного устройства. Системы FLIR обычно имеют прямоугольное общее поле зрения с размерами А (град) по азимуту и В (град) по углу места.
Различие между фокусным расстоянием и частотой, одинаково обозначенными буквой /, ясно из контекста.

Фиг. 1.5. Эффективность сканирования.
1 — возможная площадь, если все время Ту используется для сканирования пространства; 2 — площадь потерь на обратный ход вертикальной развертки; з — площадь потерь на обратный ход горизонтальной развертки или на автоматическое выравнивание каналов; 4 — полезная площадь, соответствующая времени n8CTf
Время кадра Tj — это время (в секундах) между моментом, когда система сканирования визирует первую точку поля зрения, и моментом, когда система, завершив сканирование всех остальных точек поля зрения, возвращается к первой точке. Частота, с которой система формирует полную картину, называется частотой кадров F (F = 1/71/).
Приемник (или приемники) излучения в системе не образуют информативного видеосигнала в течение полного времени кадра 71/, поскольку некоторое время требуется для автоматической регулировки усиления, восстановления постоянной составляющей и обратного хода сканирующего механизма. Соответствие между временем активного сканирования и пространственным перекрытием показано на фиг. 1.5. Большой прямоугольник на фиг. 1.5 соответствует перекрытию пространства при сканировании, если все время кадра Г/ используется для сканирования картины. Сплошной штриховкой показана площадь потерь, обусловленных затратой времени на обратный ход вертикальной развертки. В этом случае имеют в виду, что система при сканировании по вертикали имеет коэффициент использования развертки r\v < 1. Пунктирной штриховкой показана площадь потерь, вызванных затратой времени на обратный ход горизонтальной развертки или на автоматическое выравнивание каналов. Эти потери учитываются коэффициентом использования развертки по горизонтали г]н. Внутренний, незаштрихованный прямоугольник определяет активную площадь сканирования; соответствующее этой площади время равно г] vnTf. Полный коэффициент использования развертки r]sc равен произведению г]уг]н
Другой полезный параметр, который характеризует процесс сканирования,— время элемента разложения id (в секундах).
Фиг. 1.6. Время элемента разложения Td и угловой размер а чувствительного элемента приемника излучения в направлении сканирования.
Эту величину можно себе представить, рассматривая точечный источник тепловой энергии на пути сканирования пространства приемником излучения. Время между моментами, когда передний и задний края чувствительного элемента приемника пересекают этот точечный источник при сканировании, равно Если угловая скорость сканирования в пространстве объектов постоянна, то величина %d будет постоянна по всему полю зрения; в противном случае она будет разной в различных точках поля зрения.
Например, если сканирование линейно, то система с одноэлементным приемником излучения, с коэффициентом использования развертки, равным единице, и с соприкасающимися строками сканирования будет характеризоваться постоянной величиной %d =
=![]() Если коэффициент использования развертки отличен от единицы, то величина та будет равна
Если коэффициент использования развертки отличен от единицы, то величина та будет равна
![]()
(1.3)
Это иллюстрируется схемой, представленной на фиг. 1.6. В последующих главах этой книги анализируется процесс получения теплового изображения в соответствии со схемой фиг. 1.1 и рассматривается дальнейшее развитие простых систем, упомянутых выше.
Состояние элементной базы меняется так быстро, что подробное обсуждение, из каких элементов состоят отдельные компоненты систем, не имеет смысла. Цель данной книги заключается скорее в том, чтобы дать такое введение в предмет, что неискушенный читатель мог бы без затруднения отвечать на простые вопросы типа «чем определяется поле зрения?» или «зачем нужно восстановление постоянной составляющей?». Сведения о приемниках излучения, системах охлаждения для них и индикаторных устройствах можно получить в проспектах фирм, поэтому мы сосредоточим внимание на таких аспектах получения теплового изображения, которые не охватываются книгами по оптике, сканирующим устройствам и анализу систем.