Неблагоприятные режимы работы имеют место и в ГЭУ переменного тока.
Рассмотрим два наиболее распространенных вида ГЭУ переменного тока судов с едиными электроэнергетическими установками (ЕЭЭУ).
- ГЭУ переменного тока с асинхронным ГЭД судна типа «Зеленодольск» [6]. Крупносерийный рыбоморозильный производственно-транспортный рефрижератор отечественной постройки типа «Зеленодольск» предназначен для приемки разделанной и целой рыбы с промысловых судов в море, замораживания и транспортировки ее в порт. Район плавания судна — моря южного, северного и восточного бассейнов с неограниченным удалением от берегов.
Основные измерения и характеристики судна следующие: длина наибольшая 55,12 м, ширина наибольшая 9,5 м, водоизмещение в полном грузу 1115 т, техническая скорость хода в грузу 9,7—9,8 уз. Судно имеет четырехлопастный гребной винт нерегулируемого шага диаметром 1,85 м.
На судне установлены два главных дизеля типа 6ЧН 25/34 мощностью 450 л. с. при частоте вращения 500 об/мин. Главные дизели имеют автоматические центробежные регуляторы частоты вращения прямого действия с катарактом. Кроме того, установлен один стояночный дизель номинальной мощностью 225 л. с. при частоте вращения 750 об/мин, сочлененный с генератором типа ГСС-103-8 мощностью 100 кВт.
Главные генераторы типа МСС 375/500 имеют следующие номинальные данные: мощность 300 кВт, напряжение 400 В, коэффициент мощности 0,8, частоту вращения 500 об/мин.
Трехфазный гребной электродвигатель с фазным ротором типа АКСЗ-15-49-20 имеет следующие данные:мощность 475 кВт, напряжение 650 В, ток статора 600 А, частоту вращения 290 об/мин.
Гребной электродвигатель получает питание от шин общей судовой сети 380 В через индукционный регулятор типа МА 195-99/35, имеющий внутреннюю мощность 400 кВт, диапазон регулирования напряжения 0—650 В, ток нагрузки не более 600 А при cos φ=0,8, ток сети 1340 А.
Индукционный регулятор имеет дистанционный привод поворота ротора от асинхронного трехфазного электродвигателя и местный ручной привод.
Управление частотой вращения ГЭД и, следовательно, изменение скорости и направления движения судна осуществляется постами управления, установленными в рулевой рубке и в машинно-котельном отделении.
Схема главного тока предусматривает одну систему главных шин с напряжением 380 В. На судне принята единая электроэнергетическая установка. Все генераторы могут работать параллельно в любом сочетании на ГЭД с одновременным отбором мощности на судовые нужды.
Изменение частоты вращения ГЭД в пределах 290— 200 об/мин осуществляется за счет последовательного введения четырех ступеней сопротивлений в цепь ротора ГЭД посредством контакторов с плавным изменением напряжения на статорной обмотке при помощи индукционного регулятора в пределах (1—0,8) Uном.
Регулирование частоты вращения ГЭД в пределах 220—0 об/мин осуществляется изменением подводимого напряжения при введенных сопротивлениях в цепь ротора.
Реверс ГЭД осуществляется путем плавного изменения напряжения от номинального до нуля при введенных сопротивлениях в цепь ротора и изменением последовательности чередования фаз статорной обмотки с помощью реверсивных контакторов при напряжении, близком к нулю, с последующим плавным повышением напряжения и выведением из цепи ротора ступеней сопротивлений.

Рис. 28. Изменение параметров ГЭУ судна типа «Зеленодольск» при ходе в условиях шестибалльного волнения против волны.
Схема самовозбуждения генераторов выполнена по принципу фазового компаундирования.
Рассмотрим материалы испытаний гребной электроустановки судна типа «Зеленодольск» в условиях волнения в различных районах Балтийского моря.
Осциллографирование параметров ГЭУ при ходе судна в условиях волнения выполнялось при параллельной работе трех генераторов на ГЭД с отбором мощности на морозильный агрегат и рефрижераторную установку при одиннадцатом положении поста управления ГЭУ. Результаты исследований свидетельствуют о том, что при ходе судна лагом к волне колебания параметров ГЭУ практически отсутствуют. При ходе судна против волны влияние качки судна на параметры ГЭУ существенно.
Анализ наиболее характерных осциллограмм, снятых при ходе судна против волны при шестибалльном волнении (рис. 28), показал, что имеет место значительное колебание частоты вращения, тока и активной мощности гребного электродвигателя.
Падение частоты вращения ГЭД составляет 4%, подгон при уменьшении момента сопротивления 27%, весь диапазон колебания частоты вращения ГЭД 31%. Ток ГЭД изменяется в диапазоне (1,05-7-0,73) Iд.ном· Колебание активной мощности ГЭД равно (0,71-4-1,08)Рд.ном.
Частота вращения дизель-генераторов колеблется в пределах 3%. Напряжение на шинах ГРЩ повышается при резком уменьшении активной нагрузки генераторов до 5% установившегося значения.
Из рассмотрения осциллограмм следует, что рейки топливных насосов реагируют на резкое изменение нагрузки дизель- генераторов с запаздыванием около 0,7 с. Диапазон движения реек примерно соответствует диапазону колебания нагрузки.
Наблюдение за щитовыми приборами показало, что в данных условиях качки судна заметного перераспределения нагрузок между параллельно работающими дизель-генераторами не существует.
Из сказанного выше можно заключить следующее.
При правильной настройке регуляторов частоты вращения дизелей и удовлетворительном состоянии топливной аппаратуры колебания частоты напряжения судовой электростанции в переходных режимах не выходят за нормы, установленные регистром СССР, а распределение активной нагрузки между генераторами происходит удовлетворительно.
ГЭУ судов типа «Зеленодольск» не позволяет стабилизировать мощность ГЭД при качке судна. При данном испытании диапазон колебания момента сопротивления на винте составил (0,56-:-1,12)Мс.ном. При работе ГЭД на жесткой механической характеристике, соответствующей 15-му положению поста управления ГЭУ, диапазон колебания мощности ГЭД был бы примерно такой же.
В условиях качки судна режим работы дизель-генераторов улучшается при переходе на более мягкую механическую характеристику ГЭД. При введении в цепь ротора добавочных сопротивлений диапазон колебаний тока и мощности, потребляемых ГЭД от шин ЕЭЭС, на этих установках значительно уменьшается. При работе ГЭД на мягкой механической характеристике, соответствующей 11-му положению поста управления, диапазон колебания мощности ГЭД уменьшается до (0,81 -:-1,02) Рд.ном. Это подтвердилось и при исследовании в лабораторных условиях [6]. Получить мягкую механическую характеристику можно посредством регулирования частоты напряжения ГЭД за счет применения полупроводниковых преобразователей частоты.
- ГЭУ переменного тока с синхронным ГЭД судна типа «Алтай» [6]. В качестве ГЭУ с синхронным гребным электродвигателем рассмотрим гребную установку больших морозильных рыболовных траулеров типа «Алтай». Основные данные судна: длина наибольшая 108,5 м, ширина по миделю 14,4 м, осадка наибольшая 6,2 м, водоизмещение 6435 т, дедвейт 2800 т, скорость в грузу 13,7 уз. Судно имеет один гребной винт регулируемого шага (ВРШ), четырехлопастный, диаметром 3,8 м.
Для обеспечения судовых потребителей и гребного электропривода на судне установлены пять основных генераторов переменного тока со следующими номинальными параметрами каждого: напряжение 400 В, мощность 700 кВт, частота вращения 750 об/мин, ток 1015 А, частота 50 Гц. Генераторы типа МС-99-8/8 с системой самовозбуждения.
Основные генераторы приводятся во вращение дизелями типа 6Д-50М, имеющими номинальную мощность 1000 л. с. при частоте вращения 750 об/мин.
Схема главного тока предусматривает две системы главных шин: систему шин, обеспечивающую питанием гребной электродвигатель, и систему шин, обеспечивающую остальные судовые потребители. Каждый главный генератор может при помощи двух селективных выключателей типа AM-150-4 подключаться к системе шин ГЭД или к системе шин судовой сети.
Ход судна обеспечивается синхронным гребным электродвигателем типа МСГ-2600-14/36 со следующими номинальными данными: мощность 2400 кВт, напряжение 400 В, ток 4400 А, частота 50 Гц, частота вращения 167 об/мин. Система обеспечивает питание ГЭД с одновременным отбором мощности при параллельной работе пяти, четырех, любых трех или двух дизель- генераторов. Кроме этих режимов, возможна длительная работа любого одного дизель-генератора на ГЭД. При этом судну обеспечивается минимальный ход. Один генератор обеспечивает судовые нужды.
Изменение скорости судна и направления его хода обеспечивается соответствующим изменением угла поворота лопастей ВРШ. Указанное осуществляется двумя постами управления ВРШ, расположенными в навигационной рубке, или постом управления, расположенным в центральном посту управления у главного распределительного щита.
Проведенные испытания ГЭУ судов типа «Алтай» показали, что режимы реверса ВРШ и особенно асинхронного пуска ГЭД являются тяжелыми для электроэнергетической установки судна. Сравнительно тяжелым режимом является также режим работы ГЭУ при качке судна.
На рис. 29 представлена осциллограмма изменения параметров гребной электроустановки судна типа «Алтай» при ходе с тралом в условиях семибалльного волнения со скоростью 4 уз. В данном случае волнение квазирегулярное. В связи с изменением момента сопротивления на гребном валу мощность, потребляемая гребным электродвигателем, изменяется от 0,5Рд.ном до 0,71Рд.ном При этом ток ГЭД изменяется от 0,53Iд.ном 0,72Iд.ном. Изменение мощности, потребляемой ГЭД, приводит к соответствующему изменению нагрузки параллельно работающих дизель-генераторов, однако распределение нагрузки между ними происходит непропорционально изменению мощности ГЭД.
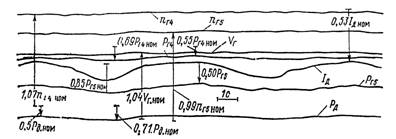
Рис. 29. Изменение параметров ГЭУ судна типа «Алтай» при ходе с тралом в условиях 7-балльного волнения.
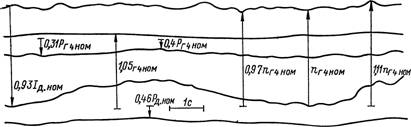
Рис. 30. Изменение параметров ГЭУ судна типа «Алтай» при ходе без трала в условиях семибалльного волнения.
Как видно из рис. 29, изменение мощности Рг5 составляет 26% номинальной нагрузки Рг.ном, в то время как мощность Рг4 изменяется на величину, составляющую 14% Рг.ном. Опыт эксплуатации ГЭУ судов типа «Алтай» показывает, что неравномерное распределение нагрузки между параллельно работающими генераторами при качке судна наблюдается часто. Основная причина заключается в наличии разницы в быстродействии, настройке регуляторов частоты вращения дизелей.
Изменение напряжения генератора при качке судна незначительно, поскольку система регулирования возбуждения генератора следит за изменением нагрузки. Изменения частоты вращения дизель-генераторов не превышают 7 %.
При ходе судна в тех же условиях, что и рассмотренные выше, со средней скоростью 4 уз, но без трала, диапазон изменения мощности ГЭД увеличивается (рис. 30). Соответственно увеличивается размах колебаний тока ГЭД при том же периоде: Τ≈8,5 с. Если при ходе судна с тралом изменение тока ГЭД составляет 0,16Iд.ном, то при ходе без трала 0,29Iд.ном. Значительное увеличение колебаний тока и мощности ГЭД приводит к увеличению диапазона изменений мощности дизель-генератора. Система возбуждения генератора в данном случае не может поддерживать стабильность напряжения генератора Uг, как при ходе с тралом, и диапазон колебаний частоты вращения дизель-генератора увеличивается до 13—14%.
Таким образом, материалы испытаний ГЭУ с синхронным гребным электродвигателем и ВРШ показывают, что при качке судна дизель-генераторы работают в напряженном режиме, обусловленном изменением их нагрузки.
При ходе судна с тралом изменение нагрузки меньше, т. е. трал является как бы своего рода демпфирующим звеном. При отсутствии трала колебания нагрузки настолько значительны, что могут приводить к существенным колебаниям частоты вращения дизель-генераторов. Такие изменения нагрузки, имеющие место в течение длительного времени эксплуатации ГЭУ в условиях качки судна, снижают моторесурс и надежность работы первичных двигателей. Значительные изменения частоты вращения дизель-генераторов, а следовательно, и частоты напряжения на шинах судовой сети неблагоприятно влияют на режим работы судовых потребителей.
Как указывалось выше, важным условием успешной безаварийной работы первичных двигателей (дизелей) ГЭУ при колебаниях момента сопротивления на гребном винте является обеспечение постоянства их нагрузки.
Уменьшить колебания мощности, потребляемой синхронным гребным электродвигателем, можно путем использования способности обмоток ГЭД накапливать и отдавать в сеть энергию, что решается схемным путем. Но, как показали исследования [б], при малых колебаниях частоты вращения ротора ГЭД поддержание постоянства активного тока статора и мощности ГЭД воздействием на его возбуждение практически невозможно. Частично эта задача может быть решена методом перераспределения мощности [1].
Перераспределение мощности можно получить путем изменения энергии, потребляемой судовыми потребителями активной мощности (камбузом, электрообогревателями и т. д.), вентиляторами и другими потребителями неответственного назначения. При увеличении момента сопротивления на гребном валу мощность, потребляемая этими потребителями, уменьшается, при уменьшении — возрастает.
Вторым способом перераспределения мощности является аккумулирование энергии посредством маховиковых электроприводов с силовыми полупроводниковыми устройствами в период сброса нагрузки с гребного винта и отдача ее в сеть в период наброса нагрузки на гребной винт. Стабилизация мощности дизель-генераторов при этом осуществляется следующим образом. При увеличении мощности ГЭД частота вращения маховикового привода замедляется, рекуперируя часть накопленной кинетической энергии в судовую сеть посредством электрической системы. При уменьшении мощности ГЭД маховиковый привод разгоняется, запасая тем самым энергию в маховых массах. В судовых условиях в качестве маховикового привода могут служить либо управляемая электрическая машина переменного тока, либо управляемая электрическая машина постоянного тока [1].
Как указывалось выше, из-за различного состояния и настройки регуляторов частоты вращения дизелей при ходе судна в условиях волнения происходит существенное перераспределение мощности между параллельно работающими генераторами единой энергетической установки. Это может привести к значительной перегрузке одного генератора и разгрузке другого, а в конечном итоге — к аварийному происшествию.
Обратимся к результатам математического моделирования работы ГЭУ судна типа «Алтай» при качке судна. При моделировании использованы известные [6] уравнения системы четырех параллельно работающих синхронных генераторов на один синхронный ГЭД. Поскольку характер изменения параметров ГЭУ в значительной мере зависит от регуляторов частоты вращения дизелей, в данном случае должна быть учтена и система уравнений дизеля.
Система уравнений для дизеля типа Д50, примененного в ГЭУ судна типа «Алтай», в относительных отклонениях при пренебрежении силами сухого трения и инерционностью измерителя может быть выражена в виде
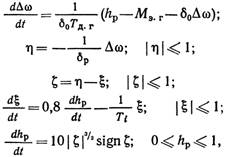
где δ0 — коэффициент наклона механической характеристики дизеля при неизменной подаче топлива (δ=0,725); Τд.г — постоянная времени дизель-генератора (Тд.г=2,87 с); Мэ.г — электромагнитный момент генератора; hР — координата реек топливных насосов; η — относительное отклонение координаты измерителя; δρ — коэффициент неравномерности регулятора; ζ — координаты золотника.
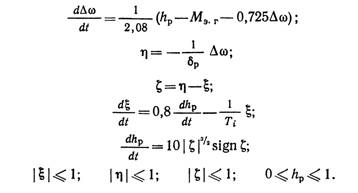
После подстановки параметров получим уравнение дизелей, о. е.:
На математической модели ГЭУ было выполнено исследование влияния изменения настройки регуляторов частоты вращения дизелей на распределение нагрузки между параллельно работающими дизель-генераторами при значительных колебаниях нагрузки электростанции. Варьировались статизм регуляторной характеристики (коэффициент неравномерности) и постоянная времени изодрома. Исследование выполнялось с одновременным и поочередным изменением одноименных настроечных параметров.
В качестве возмущающего воздействия принималось изменение полного тока ГЭД в пределах ±30% номинального с периодами гармонических колебаний Tв=4, 6, 9 с при исходной нагрузке 0,7 iном.
По результатам обработки осциллограмм построены графики изменения размаха колебаний углов нагрузки дизель-генераторов, частот вращения, положений реек топливных насосов в функции варьируемых параметров (рис. 31, 32).
Как видно из рисунков, наиболее неравномерная загрузка имеет место при значительном рассогласовании статизма регуляторов и больших различиях в углах открытия иглы изодрома (игла одного регулятора полностью закрыта, а другого полностью открыта).
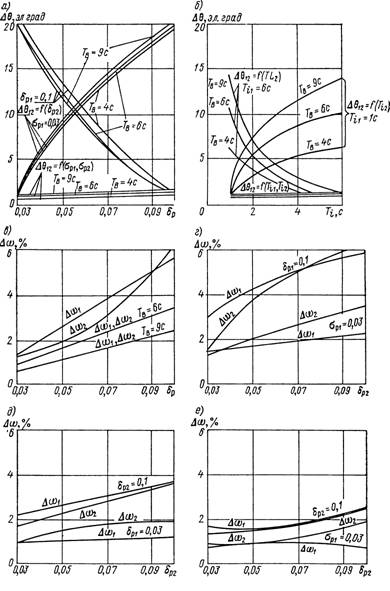
Рис. 31. Зависимости амплитуд отклонений угла мощности >ΔΘ и частот вращения >Δω дизелей от параметров настройки регуляторов частоты вращения (индексами 1, 2 указаны номера дизелей двух параллельно работающих генераторов): а—т>i>1=т>i>2=0,35с; б—>δΡ1 = δρ2=0,03; β—т>i>1=т>i2=0,35с; г — тв=4с; тi1 = т>i2=0,35с; д — тв=6с; е — тв>= 742=0,35с.
При рассогласовании постоянных времени изодромов от 1 до 6 с размах колебаний Θ не превышает 14 эл. град. Одновременное изменение статизма или постоянных времени изодромов на разницу углов влияет незначительно. Изменение периода волнения при рассогласовании статизма регуляторов мало влияет на отклонение угла между роторами, в то же время при неодинаковой настройке изодромов и уменьшении волнения Тв с 9 до 4 с размах колебаний разницы углов между роторами уменьшается примерно в 2 раза.
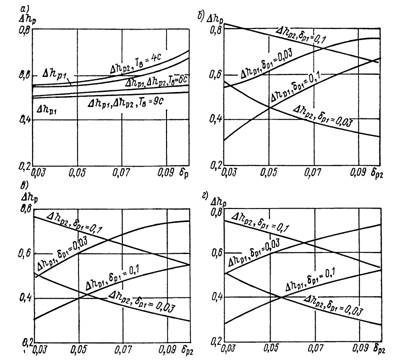
Рис. 32. Зависимости амплитуд отклонений координат реек топливных насосов дизелей от величины статизма их регуляторов частоты вращения: а — тi1 = тi2=0,35с; б — тв=4с; тi1 = тi2=0,35с; в — тb=6c; тi1=тi2=0,35с; г — тв=9с; тi1 = тi2=0,35с.
Размах колебаний Δω при одновременном увеличении статизма регуляторов с 0,03 до 0,1 и Тв=6 и 9 с увеличивается на 1,7±2,3 %, а при Тв=4 с примерно на 4,7%. В случае изменения статизма только одного регулятора размах колебаний частот вращения меняется менее ощутимо, причем существенное влияние на размах колебаний оказывает период возмущающего воздействия.
При изменении настройки статизма одного из регуляторов размах колебаний при максимальном различии в статизмах может отличаться на 50%. Изменение периода волнения на данный параметр влияет несущественно (рис. 32 б,в,г). Различие в постоянных времени изодромов в пределах от 1 до 6 с на размах колебаний реек влияет мало.
Если ГЭУ работает в условиях волнения, необходимо обеспечить равномерную загрузку дизель-генераторов в случае колебаний мощности. Как показали исследования, при рассогласовании в настройке коэффициентов неравномерности и постоянных времени регуляторов частоты вращения дизелей могут иметь место значительные колебания мощности у одного из параллельно работающих генераторов. Наиболее заметно это проявляется при рассогласовании статизма. При рассогласовании постоянных времени изодромов размах колебаний реек топливных насосов изменяется незначительно (3—5%).