Влияние настройки схемы возбуждения на аварийность в маневренных режимах.
При проектировании гребных электроустановок некоторых серий судов принят метод ступенчатого автоматического изменения частоты вращения дизелей в процессе перекладки поста управления ГЭУ. Регулирование частоты вращения дизелей по мере изменения отбираемой от них мощности позволяет получить значительную экономию топлива. Тем не менее опыт эксплуатации серий судов типа «Днепрогэс», а также крупной серии судов типа «Сибирь» выявил необходимость отказа от автоматического регулирования частоты вращения дизелей в функции от положения поста управления ГЭУ посредством изменения затяжки всережимной пружины регулятора.
Испытания гребной электроустановки сухогрузного судна «Днепрогэс» показали, что при значении времени перекладки поста управления от положения, соответствующего ходу вперед, до положения, соответствующего ходу назад, с реверсы ГЭУ протекают неудовлетворительно, поскольку происходит срабатывание защиты дизелей от понижения частоты вращения из-за перегрузки. Перегрузка дизеля по мощности и моменту после перекладки поста управления составляет 10—20% номинальных значений указанных параметров.
Причина срабатывания защиты заключается в следующем. По мере перекладки поста управления при переходе его через нулевое положение частота вращения дизеля достигает значения, соответствующего режиму холостого хода. При дальнейшей перекладке поста управления момент сопротивления на валу дизеля и мощности увеличивается во времени быстрее, чем частота вращения дизеля. Последний не успевает развить номинальную частоту вращения, а мощность и момент сопротивления на его валу уже превосходят значения, соответствующие номинальной частоте вращения. Дизель оказывается перегруженным по мощности и моменту при пониженной частоте вращения.
Таким образом, система возбуждения ГЭУ в указанном случае не обеспечивает достаточного ограничения перегрузок дизелей по моменту и мощности. Это необходимо учитывать при проектировании и настройке ГЭУ.
При реверсах некоторых ГЭУ наблюдаются значительные всплески тока главной цепи, превышающие более чем в два раза номинальное значение. В ГЭУ ледокола «Киев», например, всплеск тока главной цепи достигал значения 2,8 ном. В отдельных случаях это может привести к срабатыванию максимальной защиты и в конечном итоге к потере хода судном.
Рассмотрим пример, показывающий, как низкое качество реверсивных характеристик ГЭУ может привести к поломке винта. Ледоколы «Капитан Сорокин» и «Капитан Николаев» имеют ГЭУ постоянно-переменного тока и три гребных винта. Гребные электродвигатели постоянного тока получают питание от синхронных дизель-генераторов через мостовые трехфазные неуправляемые выпрямители. Суммарная мощность главных дизелей 24 800 л. с. В течение непродолжительного времени эксплуатации этих ледоколов в Арктике произошло несколько повреждений гребных винтов с поломками одной и даже двух лопастей одновременно. Осциллографирование реверсивных характеристик ГЭУ, выполненное на ледоколе «Капитан Николаев» при работе в ледовых условиях, показало следующее. При реверсе ГЭД с заднего хода на передний вследствие несовершенной настройки системы автоматического регулирования на несколько секунд происходит задержка частоты вращения ГЭД на значениях, близких к нулевому. При движении судна с определенной скоростью и встрече остановившегося винта со льдом вероятность поломки лопастей гребных винтов весьма велика.
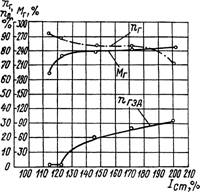
Рис. 42. Зависимость параметров ГЭУ при взаимодействии гребного винта со льдом от тока стоянки.
Данные по реверсивным характеристикам некоторых ГЭУ, полученные во время испытаний, приведены в табл. 2.
Настройка тока стоянки ГЭУ и безаварийность работы установки в ледовых условиях.
На рис. 42 представлены кривые максимальных отклонений частоты вращения дизель-генератора пг, максимальных значений электромагнитного момента генератора Mг, а также минимальных значений частоты вращения ГЭД (при взаимодействии гребного винта со льдом) в функции от тока стоянки. Кривые получены посредством математического моделирования
ГЭУ с четырьмя дизель-генераторами типа 13Д100 (генераторы типа ГП-1375-810) суммарной мощностью 7200 л. с. Из рис. 42 видно, что с уменьшением значения тока стоянки увеличивается степень провала частоты вращения ГЭД, причем начиная с Iст=1,3 происходит заклинивание гребного винта, что, как указывалось ранее, может привести к поломке гребного винта или валопровода.
Реверсивные характеристики различных типов ГЭУ
Тип судна | Схема ГЭУ | п. у. с | Время до остановки ГЭД, с | I ном | Время рекуперации энергии, с | Максимальная мощность рекуперации, о. е. | Подгон дизелей, о. е. |
«Днепрогэс» | Четыре генератора на два якоря ГЭД | 0,6 | 2,3 | 2,3 | 1,15 | 0,9 | 1,21 |
Два генератора на один якорь ГЭД | 11,5 | 10,9 | 1,18 | 7,6 | 0,234 | Снижение до 0,62 | |
«Лена» | Четыре генератора на два якоря ГЭД | 0,9 | 10 | 1,39 | — | — | 1,08 |
Один генератор в контуре | 4,1 | 10,4 | 1,21 |
|
| 1,1 | |
Портовый | Три генератора на два якоря ГЭД | 2 | 3,9 | 1,3 | 2,8 | 0,55 | 1,03 |
Два генератора на два ГЭД | 2,7 | 4,5 | 1,32 | 3,1 | 0,96 | 1,07 | |
«Москва» | Четыре генератора на три ГЭД | >1 | 16,8 | 1,38 | 10,5 | 0,44 | 1,16 |
Восемь генераторов на три ГЭД | >1 | 9 | 1,43 | 7,3 | 0,46 | 1,16 | |
«Киев» | Четыре генератора на три ГЭД | 0,6 | 3 | 2,8 | 2 | 0,9 | 1,18 |
Однако увеличение значения Iст приводит к некоторому увеличению первоначальных всплесков момента на валу первичных двигателей и провалов частоты вращения дизель-генератора в начале переходного процесса при взаимодействии гребного винта со льдом.
Следует отметить, что в пределах изменения Iст от 1,3 до 1,83 степени провалов и всплесков момента Мт можно принять постоянными, так как их изменение на данном участке незначительно. Учитывая это, а также характер функции nд=f (Iст), целесообразно произвести выбор тока стоянки в пределах от 1,65 до 1,83, т. е., по возможности, в пределах прямолинейной части зависимостей nr=f2(I ст) и Mr=f3(Iст). Разумеется, в каждом конкретном случае оптимальное значение Iст может быть разным, поэтому требуется произвести математическое моделирование с целью получения динамических характеристик ГЭУ при работе во льдах и при реверсах и на основе полученных результатов произвести выбор значения Iст·
Следует отметить, что завышение значения в допустимых пределах эффективно с точки зрения преодоления повышенного момента сопротивления на гребном винте. Однако это приводит к некоторому увеличению механических нагрузок на конструкции генераторов.
Влияние настройки системы возбуждения на безаварийность работы ГЭУ при ходе судна во льдах.
После нескольких лет эксплуатации на ледоколе «Киев» произошло ослабление крепления и смещение активной стали генераторов ГЭУ. Одной из мер для предотвращения повторения подобной аварии было уменьшение массы маховиков, навешенных на валы дизель-генераторов, с 6,7 · 103 до 3,95Х Х103 кг. При этом маховый момент маховика снизился с 12 до 8,56 т-м2. Поскольку рабочая частота вращения дизель-генераторов была снижена с 330 до 320 об/мин, для сохранения значения напряжения генератора и мощности установки номинальный ток возбуждения генератора увеличили с 43,5 до 48 А.
Во время испытаний, проведенных до уменьшения маховых моментов дизель-генераторов, максимальные броски тока главной цепи при работе ледокола во льдах доходили до 234% номинального значения. Изменение частоты вращения дизель-генераторов находилось в диапазоне (0,89-1,07), т. е. отклонение частоты вращения дизель-генераторов составляло 18%.
Испытания ГЭУ ледокола «Киев», проведенные после снижения маховых масс дизель-генераторов, показали, что при работе ледокола в ледовых условиях броски тока остались примерно такими же, но диапазон колебаний частоты вращения дизель-генераторов составил (0,81 — 1,1), т. е. 27%. При этом увеличилось число срабатываний защиты от снижения частоты вращения дизель-генераторов, а следовательно, и вероятность появления аварийных ситуаций.
Чтобы избежать этого, после проточки маховиков необходимо было произвести перенастройку системы возбуждения ГЭУ: увеличить степень действия гибкой обратной связи по току главной цепи или снизить значение тока стоянки путем перенастройки схемы.
Как видим, качество настройки элементов систем регулирования ГЭУ в значительной мере влияет на аварийность в ГЭУ. Поэтому в процессе достройки или ремонта судна и проведения сдаточных испытаний этому вопросу необходимо уделить особое внимание. После проведения настройки отдельные, наиболее важные, параметры элементов системы регулирования должны быть зафиксированы в судовой технической документации. Практика эксплуатации ГЭУ показала, что при отсутствии достаточной информации в судовой документации требуются значительные трудозатраты при настройке ГЭУ судовым персоналом.