2. АСИНХРОННЫЕ ДВИГАТЕЛИ — ОСНОВНЫЕ ПРОМЫШЛЕННЫЕ ПОТРЕБИТЕЛИ РЕАКТИВНОЙ МОЩНОСТИ
Потребителями реактивной мощности являются все электроприемники, у которых кривая синусоидального тока отстает от кривой синусоидального напряжения на фазовый угол. Однако из всех потребителей реактивной мощности наиболее значительная ее доля приходится на асинхронные двигатели (АД) по следующим причинам:
асинхронные двигатели общепромышленного назначения средней мощности (0,1—400 кВт) являются основным видом электропривода и самой массовой продукцией электромашиностроительных заводов; в народнохозяйственном парке электродвигателей их число составляет 90%, а мощность 55%, при этом их количество неуклонно растет;
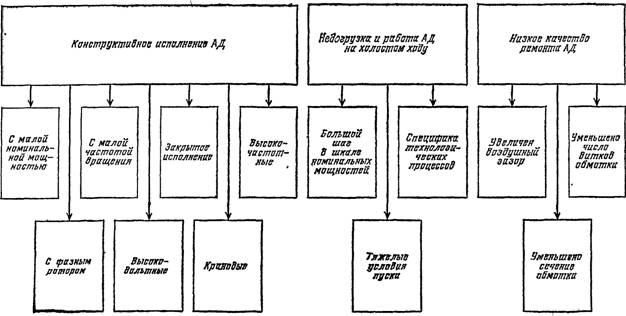
Рис. 1. Причины повышенного потребления реактивной мощности асинхронными двигателями
асинхронные двигатели являются наиболее емким потребителем электроэнергии, так как они потребляют свыше 40% вырабатываемой в нашей стране активной электроэнергии и на их долю приходится более 60% РМ всех ее потребителей (на долю трансформаторов — свыше 15%, на долю сварочных агрегатов и регуляторов, дуговых электропечных установок, преобразователей подстанций, электросетей и других индукционных приборов — около 25%);
режимы работы АД, значения их потребляемых и отдаваемых мощностей часто оказывают существенное влияние на общую РМ предприятия и энергосистемы; значения cos φ и КПД характеризуют технический уровень АД;
нагрузочные характеристики и режимы работы приводных АД ряда отраслей отечественной промышленности (легкой, пищевой, деревообрабатывающей и т. д.) такие, что доля потребляемой ими РМ часто превышает долю активной мощности на их валу.
Причины повышенного потребления реактивной мощности асинхронными двигателями, приводящими к снижению их соsф, перечислены на рис. 1. Одни причины являются объективными факторами, зависящими от конструктивных особенностей АД. Другие полностью зависят от эксплуатационного и ремонтного персонала предприятий, и их устранение обусловлено требованиями действующих Правил технической эксплуатации электроустановок потребителей, Правил устройств электроустановок и инструкций заводов-изготовителей.
Краткий анализ причин повышенного потребления реактивной мощности асинхронными двигателями по схеме рис. 1 показывает следующее.
Конструктивное исполнение АД таково, что чем меньше их номинальная мощность (при прочих равных условиях), тем больше относительная величина воздушного зазора, а следовательно, имеет место повышенное потребление РМ и низкое значение cos φ. Вследствие этого легкая, пищевая и им подобные отрасли, на предприятиях которых установлено большое количество маломощных АД, оказываются в заведомо неблагоприятных условиях в части затрат на компенсацию реактивной мощности.
Асинхронные двигатели с малыми частотами вращения выполняются с большим числом полюсов по сравнение с АД, имеющими более высокие частоты вращения. Из-за наличия большего числа полюсов увеличивается габарит АД, в частности боковая поверхность ротора. В силу этих причин АД с пониженными частотами вращения потребляют больше РМ и имеют более низкий соsф.
Асинхронные двигатели закрытого исполнения из-за худших условий охлаждения по сравнению с АД защищенного исполнения работают с меньшей активной мощностью и, следовательно, имеют повышенное потребление РМ.
Повышенное потребление РМ имеют также высокочастотные АД, поскольку их РМ (Q) зависит не только от конструктивного исполнения (длины боковой поверхности ротора б, мм, и величины воздушного зазора б, мм), но и частоты питающей сети Гц, что видно из следующей формулы, кВар:
![]() (9)
(9)
где В — магнитная индукция в стали двигателя, Т.
Кроме того, повышенное потребление РМ имеют АД с фазным ротором и крановые АД из-за большего воздушного зазора, а также высоковольтные АД из-за более мощной изоляции и более низкого коэффициента использования паза.
Недогрузка АД и как ее крайний предел работа на холостом ходу определяются целым рядом причин. На предприятиях различных отраслей промышленности имеет место недогрузка АД систематического, переменного или резкопеременного характера, приводящая к заметному росту РМ, потребляемой АД. Причины недогрузки имеют разный характер. Одна из таких причин обусловливается конструктивным исполнением и зависит от шага в шкале номинальных мощностей АД. Трехфазные АД общепромышленного назначения номинальной мощностью от 0,6 до 100 кВт в зависимости от их единой серии имеют различное число типоразмеров. Например, их первая серия А и АО имеет 14 ступеней мощностей; вторая серия А2 и А02—18 ступеней, а четвертая серия 4А — уже 20 ступеней. Разрыв мощности между отдельными ступенями шкалы сравнительно высок, а поскольку при выборе номинальной мощности двигателя на шкале берется ближайшее большее значение по отношению к расчетному, то такой АД будет работать с недогрузкой, т. е. с пониженным cos φ.
Завышенная мощность приводных АД ряда машин и механизмов обусловлена тяжелыми условиями их пуска (пуск под нагрузкой, затяжные пуски, частые пуски). Поэтому для обеспечения надежного пуска таких АД их выбирают, как правило, на ступень большей номинальной мощностью.
В различных производствах и отраслях отечественной промышленности электропривод машин и станков работает в неодинаковых условиях, определяемых спецификой производства, особенностями технологических процессов, влиянием параметров окружающей среды и т. д. В одних случаях такая специфика приводит к установке АД заведомо завышенной мощности, в других — к вынужденной: продолжительной работе на холостом ходу. Необходимо подчеркнуть, что во многих случаях нет возможности
изъять избыточную мощность приводных АД по условиям технологических процессов их работы.
Известно, что энергетические показатели АД (cos φ и КПД) зависят от качества их ремонта. Ежегодно капитально ремонтируется свыше 4 млн. промышленных электродвигателей, причем затраты на этот ремонт составляют 80% стоимости изготовляемых АД. При ремонте имеется возможность повысить эксплуатационную надежность АД, изменить в соответствии с требованиями технологических операций параметры АД и улучшить их энергетические показатели. Однако встречаются случаи, когда низкое качество ремонта приводит к снижению cos φ.
Одним из таких часто встречающихся случаев является увеличение при ремонте воздушного зазора АД с тем, чтобы застраховаться от возможного задевания ротора за сталь статора. Основными факторами, влияющими на выбор воздушного зазора, являются, с одной стороны,, энергетические показатели АД, для повышения которых стремятся получить возможно минимальную величину воздушного зазора, а с другой — эксплуатационная надежность, шум и вибрация АД, из-за которой приходится увеличивать эту величину. Исследователи и специалисты вынуждены для каждого типоразмера и серии АД изыскивать оптимальные значения данного показателя. Например, для двухполюсных АД мощностью до 28 кВт воздушный зазор рекомендуется проверять по формуле Нюрнберга, мм:
![]() (10)
(10)
где Dt — внутренний диаметр статора, мм.
Если раньше при выборе АД средней мощности в первую очередь учитывались рабочие характеристики, масса и габариты двигателя, то в настоящее время основное внимание уделяется его экономическим показателям: cos φ и КПД. Такая проблема в АД решается не только применением улучшенных сортов электротехнических серий с уменьшенной толщиной листов, уменьшением активного сопротивления обмотки статора и увеличением его активной длины (пакетов стали, сердечника статора и ротора) или изменением формы паза, но и уменьшением воздушного зазора. У АД серии 4А воздушный зазор установлен заводом-изготовителем по эмпирической формуле, мм [5]
![]() (И)
(И)
где бо — составляющая воздушного зазора, компенсирующая его изменение в процессе работы АД вследствие теплового расширения, прогиба вала и эксцентриситета, мм; Кр — коэффициент, зависящий от числа пар полюсов р и равный 0,16; (при /7=1); 0,125 (при р= 2) и 0,09 (при р=3); Рном — номинальная мощность АД, кВт.
Наименьший зазор, который могут обеспечить заводы-изготовители АД серии 4А, равен 0,25 мм.
При ремонте АД необходимо не только соблюдать допустимые значения эксцентриситета и нормативную величину воздушного зазора, но и обеспечивать равномерность его расположения между ротором и статором. Равномерность зазора зачастую нарушается из-за деформации стали, смещения подшипниковых щитов, изгиба вала и ряда других причин. Такие нарушения приводят к возникновению гармонических полей, вследствие чего создаются дополнительные магнитные потери в стали и электрические потери в меди АД, что снижает их cos φ и КПД.
Уменьшение числа витков w в обмотке фазы АД при постоянных напряжении Е'(U), частоте питающей сети f, Гц, и сечении обмотки влечет за собой повышение магнитного потока, Т, и, следовательно, тока намагничивания машины, что видно из следующей формулы, В:
![]() (12)
(12)
Это обстоятельство приводит к росту РМ полей рассеяния, что можно определить по следующей формуле, кВар:
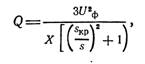 (13)
(13)
где Uф — напряжение фазы, В; s и sKP—рабочее и критическое скольжения АД; X — индуктивное сопротивление обмотки АД, Ом.