- УСТОЙЧИВОСТЬ РАБОТЫ СИСТЕМЫ С ТИРИСТОРНЫМИ РЕГУЛЯТОРАМИ РМ
Рассмотренная в § 4 (см. рис. 11, 13) система автоматического регулирования (САР) обеспечивает повышенное значение cos φ в любых условиях недогрузки АД. Система автоматического регулирования является статической, поскольку установившееся значение регулируемой величины зависит от нагрузки и изменяется при ее колебаниях. Строго ограниченные пределы регулирования значения подводимого к АД напряжения позволяют сделать вывод об устойчивости системы. Однако проверить рассмотренную САР на устойчивость и определить ее статическую ошибку все же необходимо.
Численное значение статической ошибки определяется при единичном возмущении от момента нагрузки на валу АД, так как задающее воздействие равно нулю (Хзад(р) = 0) и определяется лишь настройкой регулятора для конкретного АД.
На рис. 46 показана структурная схема замкнутой системы автоматического регулирования АД, состоящая из следующих пяти звеньев:
1) звенья 1 и 2, представляющие собой два соединенных звена, преобразующее и усилительное, и отражающие процесс в регуляторе системы;
2) звено 3 — апериодическое звено, которое при изменении задающего параметра отражает инерционность АД; входной величиной является напряжение на обмотке фаз статора, изменяющееся в зависимости от угла открывания тиристоров, а выходной — ток, проходящий по обмоткам статора АД;
- звено 4, являющееся простым преобразующим звеном; данное звено является отрицательной жесткой обратной связью по напряжению и представляет собой датчик (относительно малое активное сопротивление), включенный в одну из фаз обмотки статора (см. рис. 11); входной величиной является значение тока в цепи АД, а выходной — падение напряжения, снимаемое с датчика;
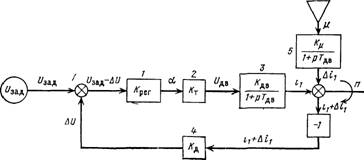
Рис 46 Структурная схема системы автоматического регулирования реактивной мощности недогруженных АД с тиристорным управлением
- звено 5, отражающее процесс в электродвигателе при возмущающем воздействии момента нагрузки и при Uзад== const.
Для проведения расчетов схему рис. 46 целесообразно представить в виде упрощенной схемы, показанной на рис. 47.
Значение статической ошибки данной САР можно получить непосредственно из передаточной функции системы, причем без нахождения ее оригинала, для чего необходимо следующее соотношение:
![]()
Тогда значение статической ошибки регулирования определяется из следующего уравнения, А/(Н-м):
![]()
где К , Кг, Крег, Кдв, Кд — постоянные вышеуказанных звеньев системы.
Например, для асинхронного двигателя типа А073-4 номинальной мощностью 28 кВт статическая ошибка системы при изменении нагрузки на валу АД на 0,01 Н-м будет равна 0,11 А. Значение 0,11 А есть разность между фактически установившимся значением регулируемого тока (тока статора) и заданным его значением.
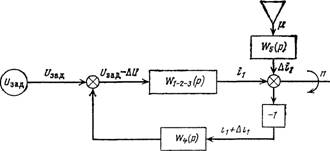
Рис 47 Упрощенная структурная схема системы автоматического регулирования реактивной мощности недогруженных АД с тиристорным управлением
Таким образом, устойчивость работы электроприемников при компенсации реактивной мощности с помощью КУ и тиристорных регуляторов, а также надежность работы самих средств компенсации реактивной мощности — необходимые условия ее рациональной компенсации и повышения экономичности работы электроустановок
Применение средств автоматического регулирования реактивной мощности позволяет увеличивать запасы устойчивости в необходимых пределах Так, в работах МЭИ выявлено, что применение ступенчато регулируемых компенсирующих устройств существенно облегчает самозапуск АД Условие их успешного самозапуска удовлетворяет следующему неравенству, В
![]() (86)
(86)
где Uост — остаточное напряжение на АД, В; Unp—предельное напряжение, при котором возможен успешный самозапуск АД, В; Mc(s) и М (s) — соответственно момент сопротивления и электромагнитный момент при скольжениях самозапуска, Н-м.
Если известно напряжение системы Uc, то остаточное напряжение примерно может быть определено по следующему выражению, В:
![]() (87)
(87)
где Хэк — эквивалентное сопротивление параллельно включенных АД и КУ, Ом, X — общее сопротивление.
Если мощность КУ возрастает, то это приводит к снижению Хэк, что вызывает рост остаточного напряжения при том же напряжении системы [см. (97)] Если же U ост = Uпр, то в результате увеличения мощности КУ напряжение системы, при котором возможен самозапуск, снижается
Использование устройств автоматического регулирования реактивной мощности позволяет включать дополнительные секции БК с мощностью, достаточной для увеличения предельного напряжения Unр, с тем чтобы производить успешный самозапуск АД в требуемый момент независимо от их удаленности.