Автоматические регуляторы возбуждения разделяются на два типа: АРВ сильного и АРВ пропорционального действия. Регуляторы сильного действия применяются для регулирования возбуждения генераторов и компенсаторов с ионными или тиристорными системами. Рассматривается возможность применения АРВ сильного действия для турбогенератора с бесщеточной системой возбуждения.
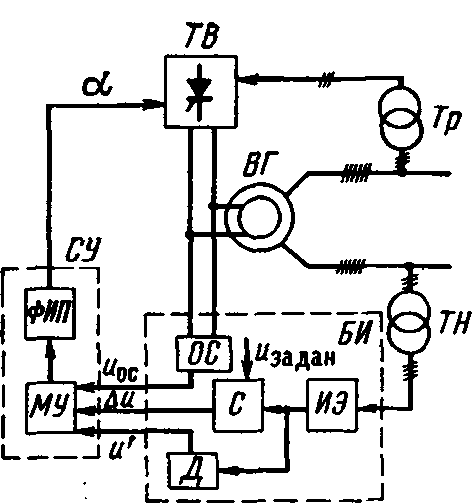
Рис. 21. Структурная схема возбуждения и регулирования вспомогательного генератора.
Автоматические регуляторы возбуждения пропорционального действия применяются для регулирования возбуждения главного генератора с высокочастотной системой возбуждения (см. рис. 7) и с системой силового фазового компаундирования (см. рис. 2), а также для регулирования возбуждения вспомогательного генератора в независимых системах возбуждения гидрогенераторов.
Для вспомогательного генератора независимой системы возбуждения турбогенератора ТГВ-500 разработан регулятор [Л. 15], структурная схема которого представлена на рис. 21. Данный регулятор занимает промежуточное положение между указанными типами АРВ, поскольку кроме канала отклонения напряжения он содержит канал производной напряжения, как и в АРВ сильного действия, но не содержит каналов регулирования по частоте (см. ниже). Возбуждение вспомогательного генератора ВГ выполняется по схеме самовозбуждения. Питание тиристорного возбудителя ТВ производится от трансформатора Тр, подключенного на выводы ВГ. Управление ТВ производится системой управления СУ, содержащей суммирующий магнитный усилитель МУ и фазоимпульсный преобразователь ФИП. Через трансформатор напряжения ТН напряжение статора ВГ подается на измерительный блок БИ регулятора, содержащий измерительный элемент ИЭ, сравнивающее С и дифференцирующее Д устройства. В указанных устройствах напряжение ВГ преобразуется в сигналы отклонения напряжения Δη и производную напряжения и'.
Регулятор имеет обратную связь ОС по напряжению ротора ВГ, сигнал от которой подается на одну из обмоток управления магнитного усилителя, который питается напряжением 450 Гц от преобразователя частоты и выполнен по однотактной схеме с самонасыщением. Сравнивающее устройство С представляет собой нелинейный мост на кремниевых стабилитронах; дифференцирующее звено и инерционная обратная связь выполнены на RC- цепочках. Измерительный элемент представляет собой трехфазный мостовой выпрямитель, нагруженный на активно-емкостную нагрузку.
Автоматические регуляторы возбуждения сильного действия обеспечивают регулирование по следующим параметрам:
по отклонению напряжения генератора от заданной уставки (∆U). Коэффициент усиления по каналу равен k∆U =50 е. в./е. н., где за единицу возбуждения (е. в.) принимается напряжение возбуждения генератора в номинальном режиме, а за единицу напряжения (е. н.) — номинальное напряжение генератора;
по первой производной напряжения (U') с коэффициентом усиления ku= 0-:-7,5 е. в./(е. н./с); по отклонению частоты (Δf) с коэффициентом усиления k∆f = 0-:-12 е. в./Гц;
по первой производной частоты (f') с коэффициентом усиления kf= 0-:-5 е. в./ (Гц/с).
Кроме того, предусматриваются гибкая и жесткая обратные связи по напряжению возбуждения генератора. Возможны и другие параметры регулирования (ток, производная тока и т. д.).
На рис. 22 представлена в качестве типовой структурная схема регулятора типа АРВ-300И для турбогенератора ТГВ-300. Основные особенности регуляторов для гидрогенераторов и синхронных компенсаторов будут указаны ниже.

Рис. 22. Структурная схема АРВ сильного действия.
Регулятор сильного действия содержит:
по каналу регулирования напряжения: блок компаундирования БК для компенсации реактивного сопротивления повышающего трансформатора с коэффициентом статизма 2—3%, потенциал — регулятор ПР для дистанционного изменения уставки регулятора с диапазоном изменения ±15%, выпрямительный трехфазный мост В1, фильтр Ф, нелинейный мост НМ для измерения отклонения напряжения ΔU, дифференцирующий элемент для формирования сигнала, пропорционального первой производной V напряжения статора генератора, выпрямитель В2 и диод подпора Д, обеспечивающие надлежащий уровень входного сигнала управления по каналу напряжения в зоне низких значений измеряемого напряжения;
по каналу форсировки возбуждения: реле форсировки РФ, имеющее выдержку времени на размыкание для предотвращения развозбуждения по цепи U' после отключения к. з.; чувствительный элемент реле РФ реагирует на изменение сигнала Δ U;
по каналу частоты: блок частоты БЧ, элемент выделения отклонения частоты ∆f и производной частоты канал автоматического ограничения перегрузок АОП с дифференцирующей цепочкой ОВМ' для обеспечения устойчивости при ограничении;
канал ограничения минимального возбуждения ОМВ с дифференцирующей цепочкой ОМВ' для обеспечения устойчивости при ограничении; коэффициенты усиления по каналам ограничений АОП и ОМВ составляют:
Rаоп, омв = 200 -:- 250 е. в./ед. тока рот.;
канал жесткой ЖОС и гибкой ГОС обратной связи по напряжению ротора, содержащий блок обратной связи БОС с делителем напряжения, который обеспечивает необходимый уровень коэффициентов усиления и потенциальную развязку между ротором и вторичными цепями.
Все перечисленные сигналы подаются на суммирующий магнитный усилитель УС, который не только суммирует сигналы, но и выполняет роль первого каскада усиления. Сигнал с выхода усилителя первого каскада усиления УС подается на вход усилителей второго каскада. Второй каскад усиления содержит два независимых усилителя: УФ — для управления форсировочной группой вентилей и УР — для управления рабочей группой вентилей. Для повышения устойчивости регулирования усилители охвачены местной отрицательной обратной связью МОС (жесткой и гибкой) с выхода второго каскада на вход первого. Предусмотрена также возможность охвата обратной связью только второго и только первого каскада усилителей.
Суммирующий магнитный усилитель УС состоит из двух однотактных магнитных усилителей, включенных по дифференциальной схеме. Каждый из них в свою очередь выполнен по двухполупериодной схеме с нулевой точкой и внутренней положительной обратной связью. Питание цепей смещения стабилизировано. Усилитель УС нагружен на соединенные последовательно обмотки управления двух усилителей второго каскада. Усилители второго каскада выполнены по двухтактной мостовой схеме. Рабочие обмотки каждого сердечника разделены на две одинаковые части, включенные в противоположные плечи моста последовательно с диодами. В одну из диагоналей этого моста включается вход фазосмещающего устройства (ФРР или ФРФ) соответствующей группы вентилей.
Усилители обоих каскадов питаются от стабилизированного статического преобразователя частоты ПЧМ, выходное напряжение которого 110 В, частота 450 Гц.
Подробные описания преобразователя частоты, блока частоты БЧ и блока обратной связи БОС даны в [Л. 16].
Некоторые наладочные организации (Л. 17] в системах регулирования с сочетанием аппаратуры АРВ-300И— ССУП-4 и АРВ-200И — ССУП-4 практикуют следующие изменения в структурной схеме:
во втором каскаде используется только один усилитель рабочей УР или форсировочной УФ группы, управляющий (рис. 23) обеими группами вентилей;
на выходе второго каскада для обеспечения нормальной работы ССУП-4, чувствительной к пульсации входного управляющего напряжения, устанавливается фильтр Φ1 (максимально допустимая пульсация 200мВ);
стабилизируется питание усилителя УС первого каскада усиления; это позволяет уменьшить паразитную связь по питанию между каналами измерения напряжения и частоты;
устанавливается фильтр на выходе ВУИ.

Рис. 23. Схема измененной структуры выходных цепей АРВ (предложение ОРГРЭС).
Структурная схема устройства ограничения тока ротора до номинального значения представлена на рис. 24,а. Величина, пропорциональная току ротора I(с выхода фильтра ВУИ), подается на выявитель перегрузки ВП, пропускающий ток перегрузки в полосе Iп= (1,3-:-2,0)Iном. Ток выхода ВП попадает на вход модели температуры МТ, состоящей из двух последовательных элементов: квадратора К и интегрирующего звена ИН. На выходе модели температуры расположен пороговый элемент ПЭ1 с заданной уставкой, формирующий воздействие на разгрузку. Для обеспечения нормального протекания процесса разгрузки введен второй пороговый элемент ПЭ2, контролирующий наличие перегрузки.

Рис. 24. Схемы устройств автоматического ограничения.
a и б — структурные схемы ограничителей перегрузок соответственно ВЭИ и ЭСП; в — принципиальная схема блока ограничения минимального возбуждения.
Устройство воздействует на вход усилителя УС. Приведенная структура ограничителя обладает существенными дефектами:
неточность моделирования температуры вследствие использования интегрального элемента;
неотработанность механизма возврата системы в исходное положение при устранении причин перегрузки;
ненадежная работа устройства при повторных перегрузках и перегрузках малой кратности.
В настоящее время в институте «Энергосетьпроект» разработан и внедряется в типовое проектирование еще один вариант автоматического ограничителя перегрузок АОП, структурная схема которого представлена на рис. 24,б. Измеритель перегрузки ИП выявляет абсолютное значение и знак отклонения тока ротора (статора) относительно некоторой заданной уставки: +Δ/— перегрузка, — Δ/ — недогрузка. Сигнал, пропорциональный перегрузке, подается на вход модели температуры МТ, состоящей из нелинейного преобразователя НП и инерционного элемента ИЭ. Использование инерционного звена вместо интегрального приближает модель к реальному физическому объекту. Тем самым повышается точность моделирования, особенно ощутимая в зоне небольших кратностей перегрузок, которые встречаются наиболее часто. Наличие нелинейного преобразователя с регулируемой нелинейностью позволяет подобрать практически любую заданную характеристику МТ. Выход модели температуры фиксируется пороговым элементом ПЭ, который формирует воздействие на разгрузку через логический элемент типа И при условии наличия перегрузки, контролируемой выявлением знака перегрузки ВЗП. В случае недогрузки формируется сигнал на возврат системы возбуждения в исходный режим. Неуспешное действие канала разгрузки контролируется элементом независимой выдержки времени ЭВ, который формирует сигнал на входе в схему защиты генератора, через логический элемент типа НЕ, деблокируемый при наличии перегрузки. Применение АОП по структурной схеме рис. 24,б позволяет полнее использовать перегрузочные возможности машины.
Регулятор сильного действия для гидрогенераторов отличается от приведенного для турбогенераторов параметрами комплектующей аппаратуры, а именно чувствительностью блоков ПЧМ, магнитных усилителей обоих каскадов и другой аппаратуры к значительному повышению частоты тока статора генератора (до 135% номинальной) при полном сбросе нагрузки машины. Вентильные возбудители гидрогенераторов могут снабжаться фазорегуляторами типа ФС-2, требующими больших мощностей управления. В этом случае в комплекте АРВ Предусматривается дополнительный силовой блок.
Регулятор сильного действия для синхронных компенсаторов отличается от типового в большей мере. Одногрупповая схема возбуждения требует одного выходного усилителя во втором каскаде. Не используется фильтр в цепи канала напряжения, так как статический фазорегулятор ФС-13 менее чувствителен к пульсациям.
Синхронный компенсатор может работать с отрицательным током ротора. Поэтому во избежание «опрокидывания» синхронного компенсатора вводится еще один параметр регулирования: внутренний угол φ между продольной осью ротора и напряжением статора синхронного компенсатора. Канал регулирования по внутреннему углу содержит датчик угла поворота, механически связанный с валом ротора. Сигнал с выхода датчика угла подается в суммирующий усилитель встречно сигналу отклонения напряжения. В нормальном режиме (с положительным током ротора) внутренний угол мал и регулирование практически ведется только по напряжению. С ростом угла выход датчика угла φ растет до выравнивания воздействий по каналам φ и ∆U. Вследствие этого предотвращается «опрокидывание» синхронного компенсатора.
Ограничение угла может быть заменено ограничением реактивной мощности с помощью ОМВ. Зависимость между углом ротора и потребляемой синхронным компенсатором реактивной мощностью является нелинейной [Л. 19]. Это в ряде случаев делает невыгодным работу в зоне больших углов. Кроме того, ограничение по реактивной мощности позволяет отказаться от механического элемента — датчика угла.
В настоящее время разработан и начинает серийно выпускаться опытным заводом ВЭИ унифицированный автоматический регулятор возбуждения сильного действия (АРВ-СД) для гидрогенераторов, турбогенераторов и синхронных компенсаторов с ионной и тиристорной системами возбуждения.
Унифицированный регулятор сделан на базе прежних разработок ВЭИ. В конструктивном отношении АРВ-СД выполнен в виде ряда блоков. [Л. 9, 16, 27, 29].
Исполнение блоков ограничения перегрузки и ограничения двойного тока ротора нельзя считать удовлетворительным. В качестве недостатка можно отметить: сохранение интегрального звена в основе модели температуры, усложненное решение разгрузки при повторной перегрузке, усложненный узел возврата, отсутствие гибкости схемы (ограничитель перегрузок целесообразно было бы решить в конструктивном отношении в виде нескольких отдельных блоков).
Несколько подробнее остановимся на блоке ограничения минимального возбуждения (ОМВ). В ряде энергосистем (Л. 28] режим малых нагрузок сопровождается избытком реактивной мощности вследствие влияния емкостной проводимости линий электропередачи. В этих условиях эффективным средством компенсации реактивной мощности является снижение напряжения в генерирующих узлах сети вплоть до перехода генераторов в режим потребления реактивной мощности, т. е. в режим недовозбуждения. В этом случае ток ротора генератора может снизиться до такого уровня, при котором возможно нарушение устойчивости его работы или возникновение опасности перегрева лобовых частей обмоток статора. Критический уровень возбуждения не является постоянным. Он зависит от активной нагрузки генератора и от напряжения сети. Задачу ограничения минимального уровня возбуждения решает блок ОМВ (рис. 24,в), содержащий фазовый дискриминатор и схему сравнения.
Для того чтобы уставка ОМВ зависела как от реактивной, так и от активной составляющей тока статора, на вход блока подаются токи IА и Iс. Результирующий ток I, поступающий на вход фазового дискриминатора, равен сумме векторов I=k2IA+k3Ic, где к2 и к3— коэффициенты пропорциональности. Вектор I повернут относительно вектора IА на некоторый угол а. Выходное напряжение фазового дискриминатора определяется выражением
![]()
где Iа, Iр — активная и реактивная составляющие тока статора; k± — коэффициент передачи блока.
Разность напряжений U3 и k4Uг(где Uг — напряжение статора генератора) поступает на выход ОМВ через нелинейное звено. Тем самым блок ОМВ начинает функционировать в качестве жесткой отрицательной обратной связи.
Таким образом, ОМВ формирует воздействие, предотвращающее снижение возбуждения генератора ниже допустимого. Напряжение, при котором наступает ограничение, можно задавать, изменяя коэффициент k4. Элементы Ф1 и Ф2 выполняют роль фильтров, обеспечивающих согласование выхода ОМВ с входом АРВ по содержанию высших гармоник. Цепочки R7, С3 и С4 выполняют роль демпфирующего звена и обеспечивают устойчивость работы генератора в режиме ограничения. Статизм характеристики ОМВ регулируется резистором Р5.