ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ КОНТРОЛЛЕРА
Контроллер выполняет следующие функции:
непрерывный циклический опрос матрицы датчиков;
регистрацию изменений в состоянии датчиков;
хранение информации об изменениях в собственном ОЗУ;
передачу информации в ЭВМ;
поддержку системных часов:
самотестирование.
Обычно имеется возможность контроля за работой контроллера и изменения его настройки с панели управления. Опрос матрицы представляет собой последовательное считывание состояния портов ввода и сравнение полученных результатов с предыдущим их состоянием. При возникновении изменении они фиксируются в ОЗУ контроллера, который переходит в режим “жесткого слежения”, т.е. повторяет опрос, не откликаясь ни на команды с пульта, ни на сигналы ЭВМ. Выход из этого режима происходит при отсутствии дальнейших изменений более 20 с. Это время обеспечивает отделение одной аварии от другой и может определяться, например, циклом самого продолжительного АПВ. Каждое сообщение снабжается временной меткой, которая отражает системное время с точностью 0,01 с. Полученная информация находится в ОЗУ контроллера до сеанса связи с ЭВМ. При переполнении ОЗУ при продолжительном отсутствии связи информация сбрасывается. Обмен информацией с ЭВМ происходит по её инициативе. Для связи используется последовательный порт контроллера.
ИСПОЛЬЗОВАНИЕ ПАРАЛЛЕЛЬНОГО ПОРТА ВВОДА-ВЫВОДА ДЛЯ СБОРА ДИСКРЕТНОЙ ИНФОРМАЦИИ
В системе сбора информации от дискретных датчиков используются два способа подключения их к контроллерам (ЭВМ): радиальный; матричный (шинный).
При радиальном способе датчик подключается к одному разряду порта ввода (рис. 2.3).
Для подключения каждого датчика требуется один провод и один общий (источник) для всех датчиков. Следовательно, для датчиков требуется N + 1 жил кабеля. В некоторых системах на один контакт используется пара проводов (устройство “Карат”).
Рис. 2.4. Подключение датчиков матричным способом
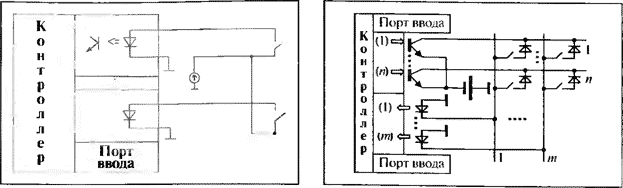
Рис. 2.3. Подключение датчиков радиальным способом
открывается транзистор (2) порта вывода; считывается информация с разрядов (/) -г (т) порта ввода; закрывается транзистор (2) порта вывода; и т.д. до порта вывода (и).
—В этом случае для опроса датчиков требуется пт жил кабеля. Обычно число разрядов портов одинаково (п = т) и, следовательно, для N датчиков требуется 2Ν жил кабеля. Решив простое уравнение 2 n = N +1, получим, что при N > 1 матричная схема дает экономию в количестве жил кабеля. Так, для N = 100 при первом способе требуется 101 жила кабеля, а при втором 20 жил. Очевидно, что матричная схема значительно экономичнее и далее рассматривается только она. Пример нумерации контактов для матричной схемы приведен на рис. 2.5.

Рис. 2.5. Вариант подключения контактных датчиков матричным способом
Проверка связей контроллер — ЭВМ осуществляется при каждом запуске системы. Если программу контроля запроса контроллера сделать резидентной, то очевидно система будет запускаться несколько раз в сутки. Это объясняется тем, что запуск осуществляется при любых коммутациях (включениях-отключениях выключателей) в схеме и при любых пусках РЗА (в том числе и при внешних КЗ).