3-6. Прекращение асинхронного режима и восстановление синхронной работы приемной энергосистемы и энергообъединения
В тех случаях, когда возмущения столь тяжелы и маловероятны, что обеспечивать синхронную работу приемной энергосистемы с энергообъединением нецелесообразно, требуется решить вопрос: следует ли обеспечивать результирующую устойчивость или же выгоднее прекратить асинхронный режим с помощью делительной автоматики, а затем, после мобилизации резервов в отделившейся энергосистеме и после действия АЧР восстанавливать синхронную работу. Аналогичная альтернатива возникает в случае отделения приемной энергосистемы от энергообъединения: устанавливать НАПВ или АПВУС. Для того чтобы принять в подобных случаях наиболее целесообразное решение, требуется оценить, какая часть нагрузки и на какое время будет отключена при том или ином решении. Желательно было бы, конечно, сопоставить ущерб от перерыва электроснабжения в каждом из этих случаев, однако в настоящее время имеется слишком мало достоверных данных по оценке ущерба от перерывов электроснабжения, чтобы можно было использовать такое сопоставление.
Рассмотрим условия ресинхронизации энергосистем с дефицитом мощности, оценим влияние различных факторов на области ресинхронизации, определим долю нагрузки, которая при этом должна быть отключена или отключится самопроизвольно, и время, в течение которого может быть восстановлено электроснабжение этой нагрузки. Упрощенные расчеты ресинхронизации могут быть выполнены при следующих допущениях:
переходная э. д. с. генераторов Е1 за реактивным сопротивлением х'а постоянна;
роторы генераторов в электрическом и магнитном отношении симметричны;
в качестве условия ресинхронизации принят переход скольжения через нуль, хотя при строгом решении этой задачи требуется рассмотреть возможность «проскакивания синхронизма», т. е. сохранения асинхронного режима после изменения знака скольжения. (Учитывая, что
в эксплуатации «проскакивание синхронизма» встречается крайне редко, а при ресинхронизации энергосистем с дефицитом мощности не наблюдалось вообще, принятое допущение является вполне приемлемым.)
При асинхронном режиме приемной энергосистемы с энергообъединением на генераторы в этой системе действуют как ускоряющие, так и тормозящие моменты. Ускоряющими являются момент турбины Мт и асинхронный момент Мас, а тормозящим — собственный момент М22, определяемый нагрузкой и потерями в активных сопротивлениях сети. Так как по мере снижения частоты (в небольших пределах) несколько снижается и э. д. с., и нагрузка, и реактивные сопротивления, то можно приближенно считать, что собственные и взаимные моменты при этом практически не изменяются.
На рис. 3-28 в соответствии с выражением (3-23) построена область ресинхронизации энергосистемы с дефицитом мощности в координатах Р12, Р22.
Как видно из выражения (3-23), ресинхронизация В ОСНОВНОМ определяется соотношением мощностей Р22) С ОДНОЙ стороны, И Рт2 + Яас, С другой. При ОТСУТСТВИИ резерва, что в большинстве случаев имеет место, и при неизменной схеме асинхронная мощность и мощности турбины могут быть приняты приблизительно постоянными, так как влияние расположения нагрузки на асинхронную мощность незначительно.

Рис. 3-28. Область ресинхронизации энергосистемы с дефицитом мощности (Рбаз = Рном, &н = 2,0; резерв отсутствует; Г/=10 с).
В то же время величина Р22 в сильной степени зависит от э. д. с. приемной энергосистемы, места подключения и мощности нагрузки и значения потерь в активных сопротивлениях сети. Зависимости собственной мощности приемной энергосистемы от мощности нагрузки для различного места ее -подключения, характера и соотношения активного и реактивного сопротивления электропередачи показаны на рис. 3-29 (при их построении принималось, что напряжение на нагрузке в исходном предаварийном режиме было номинальным) .
В случае, когда активные сопротивления линий близки к нулю (рис. 3-29,а), что характерно для электропередач напряжением 154—220 кВ и выше, собственная мощность приемной энергосистемы Р22 почти пропорциональна мощности нагрузки Рн, если нагрузка расположена близко к генераторам, и мало зависит от мощности нагрузки, если нагрузка расположена вблизи центра качаний или за центром качаний ближе к шинам передающей системы.

Рис. 3-29. Зависимости собственной мощности приемной энергосистемы от величины нагрузки и ее расположения
В случае, когда активные сопротивления линий значительны (рис. 3-29,6, в), что характерно для электропередач напряжением 110 кВ и ниже, характер зависимости Р22 от мощности нагрузки Рн при ее различном расположении аналогичен зависимостям при г2=0. Однако абсолютное значение Р22 существенно возрастает (тем больше, чем больше Гд). и условия ресинхронизации ухудшаются.
Расчеты показывают, что при малом активном сопротивлении линий (электропередачи напряжением 154 кВ и выше) самопроизвольная ресинхронизация при нагрузке, близкой по характеру к постоянному сопротивлению, обеспечивается в большинстве случаев (ресинхронизации не происходит только при больших набросах мощности, в 2—2,5 раза превышающих мощность генераторов приемной энергосистемы), а при нагрузке, близкой по характеру к постоянной мощности, может не обеспечиваться только при достаточно больших (более 10—15% при слабых связях, более 30—40% при жестких связях) дефицитах мощности и расположении нагрузки вблизи шин приемной системы. В то же время при значениях 1/х1=0,А—1,0 (электропередачи напряжением 110 кВ и ниже) влияние активного сопротивления может быть настолько существенным, что самопроизвольная ресинхронизация во многих случаях может не обеспечиваться даже тогда, когда нагрузка энергосистемы меньше генерируемой мощности, т. е. система в предаварийном режиме не является приемной. Такие случаи торможения генераторов из-за больших активных потерь наблюдались, например, при несинхронном АПВ с большим углом [170], а также в ряде эксплуатационных режимов. Например, при нарушении устойчивости, описанном в гл. 1 (см. рис. 1-4), активные потери в линии 110 кВ в асинхронном режиме составили примерно 50% мощности генераторов приемной энергосистемы.
Ресинхронизация энергосистем с дефицитом мощности или восстановление их синхронной работы может обеспечиваться следующими мероприятиями:
отключением части нагрузки, частотным пуском гидрогенераторов и переводом их из режима синхронного компенсатора в режим выдачи активной мощности, отделением приемной энергосистемы от энергообъединения посредством делительной автоматики (или вручную), частичным снижением возбуждения генераторов дефицитной энергосистемы и отключением (снятием возбуждения) синхронных компенсаторов на приемных подстанциях.
Длительность асинхронного режима tас после отключения части нагрузки может быть упрощенно оценена в предположении, что генераторы приемной энергосистемы после выпадения из синхронизма работают с установившимся средним скольжением sср. Тогда
![]() (3-24)
(3-24)
где ДР— разность между предельным по условиям ресинхронизации значением собственной мощности Р22пред и значением собственной мощности после отключения части нагрузки Р22откл (рис. 3-30,а)
![]() (3-25)
(3-25)
Здесь значения /ас и т/ даны в секундах, а 5ср и АР — в относительных единицах.

Рис. 3-30. Оценка длительности асинхронного режима.
При приближенной оценке /ас по (3-24) исходят из упрощенного представления равноускоренного движения ротора генератора от среднего установившегося скольжения 5ср до 0 под действием разности мощностей АР, что дает некоторый запас, т. е. величины /ас получаются несколько больше действительных. Для более точного определения длительности асинхронного режима необходимо рассчитать зависимость изменения скольжения генератора во времени [170].
На рис. 3-30,6 приведены рассчитанные по (3-24) зависимости /ас.х=:ф(ДР) для одного значения Р\2= 1,4 (при таком значении Р12, Р22пред=1,23) и различных исходных значений Р22 о (или 5ср). Длительность асинхронного режима существенно сокращается, если значение ДР>0,3-*-0,4.
Зависимости, приведенные на рис. 3-29 и 3-30, и расчеты по (3-24) показывают, что отключение нагрузки приемной энергосистемы дает наибольший эффект, т. е. обеспечивает быструю ресинхронизацию, если активное сопротивление линий электропередачи незначительно и нагрузка расположена вблизи шин этой энергосистемы, причем это мероприятие тем эффективнее, чем ближе нагрузка по своему характеру к постоянной мощности. При большом активном сопротивлении линий торможение энергосистемы определяется в большей мере значением активных потерь и отключение нагрузки может вообще не привести к ресинхронизации или ресинхронизация происходит только после длительного асинхронного хода. Отключение нагрузки также малоэффективно, если нагрузка, независимо от ее характера, расположена вблизи центра качаний или между центром качаний и шинами энергообъединения. Во всех этих случаях целесообразно для восстановления синхронной работы приемной энергосистемы ориентироваться не на отключение нагрузки, а на другие мероприятия, рассматриваемые ниже.
Длительность асинхронного режима тем меньше, чем большая часть нагрузки отключается. Однако, конечно, не следует стремиться к тому, чтобы за счет отключения нагрузки обеспечить минимальное время асинхронного режима или минимизировать мощность отключаемой нагрузки из условия ресинхронизации, поскольку в первом случае пришлось бы отключать всю нагрузку, а во втором— слишком долго продолжался бы асинхронный режим. Целесообразным решением в этом случае является обеспечение ресинхронизации в приемлемое время 5—15 с, причем большее время соответствует менее жестким связям. Отключение нагрузки производится в таких случаях в основном с помощью АЧР.
В качестве иллюстрации действия АЧР как средства ресинхронизации может служить осциллограмма нарушения устойчивости района с дефицитом мощности после к. з. (рис. 3-19) с последующим восстановлением синхронизма после срабатывания в асинхронном режиме четырех очередей АЧРІ (/уст=48,5 Рц, ^РВ=0,3 с) с суммарной мощностью подключенных потребителей 30 МВт. Кривая изменения среднего значения частоты при этом показана на рис. 3-33 (построена по осциллограмме, приведенной на рис. 3-19).
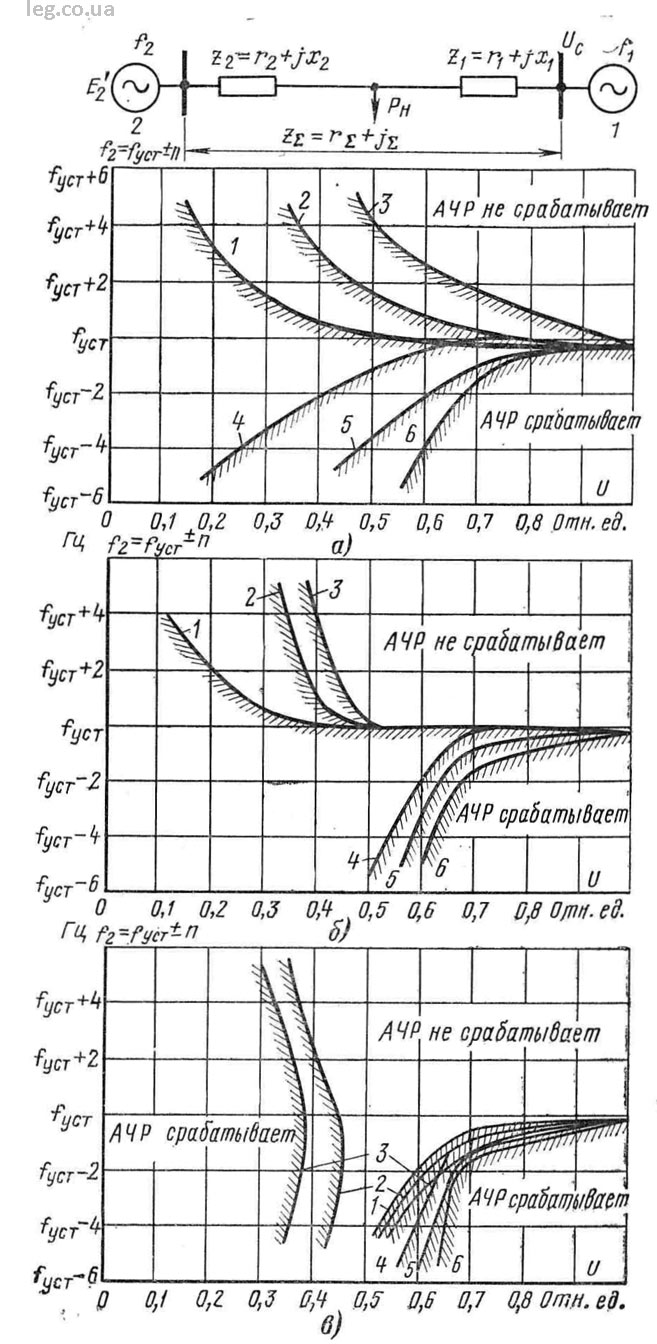
Рис. 3-31. Области срабатывания АЧР при асинхронном режиме в двухмашинной схеме. (Индукционное реле частоты ИВЧ-3 и ИВЧ-011).

Рис. 3-32. Области срабатывания АЧР при асинхронном режиме в двухмашинной схеме (полупроводниковое реле частоты РЧ-1).
Отметим еще одно обстоятельство, связанное с неверным пониманием факторов, влияющих на ресинхронизацию. Выдвигались предложения применять НАПВ с контролем разности частот, которые исходили из того, что если разность частот до НАПВ меньше, чем по условию (3-23), то ресинхронизация обеспечивается, а если эта разность больше, то синхронизация не обеспечивается. Это ошибочные утверждения. Процесс определяется соотношением мощностей и разностью частот после НАПВ. Как видно из кривых на рис. 3-29, значение Р22 в большинстве случаев значительно меньше Рн и, следовательно, после несинхронного включения, независимо от скольжения, при котором оно произведено, может произойти ресинхронизация. Неоднократно имели место в энергосистемах случаи, когда несинхронные включения происходили при разности частот до 10—20 Гц, причем лишь такие включения предотвращали тяжелую аварию.

Рис. 3-33. Кривая изменения среднего значения частоты в асинхронном режиме после торможения дефицитного района и действия АЧР.
С другой стороны, несомненно, что при больших активных сопротивлениях линий электропередачи возможны случаи, когда после включения со скольжением, равным нулю (и большим углом) ресинхронизации не происходит [170]. Изложенное еще раз показывает, что наиболее правильное истолкование явлений при ресинхронизации может быть получено лишь на основе использования уравнений для балансов мощностей (моментов) при асинхронном режиме, т. е. практического критерия (3-23).
Рассмотрим теперь случай, когда применение кратковременных асинхронных режимов нецелесообразно и при возникновении асинхронного режима следует производить отделение энергосистемы от энергообъединения. Это мероприятие следует прежде всего применять тогда, когда асинхронный режим по условиям работы некоторых потребителей вообще недопустим. На отделение энергосистемы следует ориентироваться также в следующих случаях:
если вблизи центра качаний расположены очень ответственные потребители и при возникновении асинхронного режима произойдет их отключение;
если в асинхронном режиме возможно самопроизвольное отключение нагрузки большей мощности, чем после отделения энергосистемы;
если асинхронный режим может привести к нарушению устойчивости других электростанций или частей энергообъединения [возникновению многочастотного асинхронного хода, что характерно для сложных энергосистем (см. гл. 5)].
Выпавшую из синхронизма энергосистему или ее часть следует отделять, если активное сопротивление линии электропередачи велико (г£/хЕ >0,3-0,4). Так как в этом случае торможение энергосистемы определяется в значительной степени значением активных потерь, то после отделения энергосистемы объем отключенной нагрузки во многих случаях будет невелик или же в ряде режимов вообще не придется прибегать к отключению нагрузки.
Для отделения энергосистем при нарушении их устойчивости во всех этих случаях применяется автоматика прекращения асинхронного хода (АПАХ). Кроме того, эта автоматика должна устанавливаться для того, чтобы при ориентации на ресинхронизацию произвести разделение, если ресинхронизация по каким-то причинам не произошла.
В соответствии с [40] АПАХ следует устанавливать на всех электропередачах, где может возникнуть асинхронный режим. Как показывает анализ отдельных аварий, многие из них развивались именно из-за отсутствия делительной автоматики.
В тех случаях, когда асинхронный режим или глубокие синхронные качания приводят к существенному снижению напряжения на шинах потребителей и как следствие к серьезным нарушениям их электроснабжения, а отделение приемной энергосистемы при этом не вызывает такого понижения частоты, при котором работает АЧР (что характерно для слабых связей), целесообразно применять неселективную делительную автоматику, осуществляющую деление при углах 90—180°. Она мо-
жет реагировать на значений угла, тока, напряжения или сочетания этих параметров.
В остальных случаях действие АПАХ должно быть обязательно селективным, так как всякая ее излишняя работа приводит к отделению приемной энергосистемы. Согласно [40] в тех случаях, когда на ресинхронизацию нельзя рассчитывать, деление должно производиться через два-три цикла асинхронного режима или с выдержкой времени не более 6 с.
При допущении кратковременных асинхронных режимов после НАПВ или несинхронного включения, производимого персоналом, АПАХ является резервирующей автоматикой и действует в случае, если по каким-либо причинам ресинхронизация не произошла. В этих случаях АПАХ должна осуществлять деление с учетом времени, необходимого для ресинхронизации, т. е. через три — пять циклов асинхронного режима, но не позже чем через 15—30 с (большее время для электропередач, связывающих ГЭС с энергосистемами).
При выборе мест установки АПАХ следует стремиться обеспечить следующие требования: минимальное понижение частоты в приемной энергосистеме, минимальное число отключаемых выключателей и линий, сохранение допустимых уровней напряжения на приемных подстанциях, размещение устройств автоматики по возможности ближе к центру качаний, резервирование действия автоматики (например, установкой АПАХ на обоих концах линий).
Если автоматика не сработала или отсутствует вообще, дежурный персонал должен принять меры по восстановлению синхронизма. Если действия персонала по восстановлению синхронизма неуспешны, то по истечении 2 мин он должен вручную произвести отделение энергосистемы (не допускается асинхронный режим более 3 мин). Точки деления энергосистемы и конкретные мероприятия должны быть намечены заранее.
Применение АПВУС после разделения энергосистем позволяет производить включение отделившейся приемной энергосистемы с достаточно малым углом, чтобы это не представляло опасности для синхронных машин и обеспечивало втягивание в синхронизм практически без асинхронного режима. Использование наиболее совершенных схем АПВУС [72] дает возможность производить такое включение при достаточно большом скольжении. Поскольку мощность потребителей, отключаемых от АЧР в приемной энергосистеме с целью подъема частоты до значения, при котором работает АПВУС, должна быть минимальной, то требуется определить максимальное скольжение, при котором обеспечивается втягивание в синхронизм без асинхронного режима. Такие условия определены в [72] без учета различия между мощностью нагрузки приемной энергосистемы Ря и собственной мощностью Р22, которое часто существенно изменяет эти условия. Для определения условий, определяющих предельное значение скольжения при АПВУС, примем, что перед включением частота в приемной энергосистеме не изменялась, т. е. была ниже номинальной и постоянна.

Рис. 3-34. Фазовые траектории при несинхронном включении или АПВУС энергосистемы с дефицитом мощности.
В действительности после работы АЧР происходит подъем частоты, поэтому сделанное допущение обеспечивает некоторый запас. Для определения условий синхронизации используем при принятых ранее допущениях следующее уравнение:
![]() (3-28)
(3-28)
Фазовые траектории для уравнения (3-28) показаны на рис. 3-34. Легко показать, что эти траектории описываются выражением
![]() (3-29)
(3-29)
Траектория, проходящая через точку 5=0; б=я, ограничивает область синхронных качаний. При этом условии произвольная постоянная
![]() (3-30)
(3-30)
В соответствии с (3-29, 3-30) на рис. 3-35 показаны граничные фазовые траектории![]() для различных
для различных
![]() значений
значений
Приведем пример применения АПВУС в энергосистеме с дефицитом мощности. В ОЭС Северного Кавказа при отключении линии 330 кВ Машук — Невинномысск в восточной части ОЭС образуется значительный дефицит мощности, который ликвидируется с помощью АЧР. Несинхронное АПВ недопустимо вследствие больших токов в генераторах небольших ГЭС и нежелательно из-за больших понижений напряжения у основных потребителей. Для определения максимальной разности частот, на которую следует настроить АПВУС, были проведены испытания*, которые показали, что втягивание в синхронизм в первом же цикле происходит при разности частот 1.5 Гц. С запасом была выбрана уставка в 1,2 Гц. Осциллограмма опыта показана на рис. 3-36. Расчет по кривым, приведенным на рис. 3-35, дает с учетом АР/Р 12 = 0.2 разность частот в 1,6 Гц, а при допущении, что АР = 0, — всего лишь 1,1 Гц. Применение АПВУС с включением при разности частот 1,2 Гц позволило предотвратить в этом энергообъединении шесть аварий в течение двух лет.
* Испытания проведены под руководством Н. Б. Глаголевой, Л. М. Горбуновой (ВНИИЭ) и В. А. Клепнева (ОДУ Северного Кавказа).

Рис. 3-35. Граничные фазовые траектории для различных значений
ар/р12.
Применение таких средств восстановления нормальной работы приемных энергосистем после нарушения синхронизма, как отключение части потребителей или отделение энергосистемы, приводит в ряде случаев к перерывам питания потребителей (правда, при наличии ЧАПВ и возможности ликвидации дефицита — кратковременным). Вместе с тем в определенных условиях можно обеспечить ресинхронизацию энергосистем, не прибегая к отключению потребителей, что может существенно повысить надежность энергоснабжения.
Как видно из выражения (3-23), собственная мощность приемной энергосистемы Р22 в большой степени зависит от э. д. с. (возбуждения) генератора. Поэтому изменение возбуждения генераторов может существенно влиять на условия ресинхронизации. На рис. 3-37 приведены зависимости SДОп и Sср от э. д. с. эквивалентного генератора приемной энергосистемы, построенные в соответствии с (3-23) для одного из значений соотношения параметров, а на рис. 3-38 по выражениям (2-52) и (3-23) построены области ресинхронизации энергосистемы в координатах Рц/Р22, Р12 как для случая ее ускорения (S>0), так и торможения (S<0).

Рис. 3-36. Осциллограмма опыта АПВУС линии 330 кВ Машук — Невинномысск.

Рис. 3-37. Влияние возбуждения (э. д. с.) генератора на области ресинхронизации приемной энергосистемы.
Анализ этих областей показывает, что при выпадении из синхронизма с $>0 увеличение (форсировка) возбуждения с точки зрения ресинхронизации всегда играет положительную роль, поскольку ЭТО приводит как К увеличению собственной МОЩНОСТИ Р22 и уменьшению среднего значения установившегося скольжения 5ср, так и к увеличению взаимной мощности Р12 и допустимого скольжения 5доп.
В случае, когда после выпадения из синхронизма энергосистема тормозится (яСО), увеличение возбуждения (форсировка) отрицательно влияет на условия ресинхронизации, поскольку увеличение МОЩНОСТИ Р22» пропорциональной квадрату э. д. с., и Яср происходит быстрее, чем увеличение мощности Я12, пропорциональной первой степени Э. Д. С., И Sд0П.

Рис. 3-38. Области ресинхронизации энергосистем.
В то же время снижение возбуждения (расфорсировка) может существенно улучшить условия ресинхронизации без отключения нагрузки, чем, с одной стороны, восстанавливается нормальная работа энергосистем, а с другой, повышается надежность работы потребителей [147]. Например, в рассмотренном случае (рис. 3-37) для ресинхронизации достаточно снижения э. д. с. с 1,2 до 1,18.
Этот способ ресинхронизации энергосистем с дефицитом мощности наиболее целесообразно применять при больших значениях активных сопротивлений линий. Он также может быть эффективен при значительной доле нагрузки, в сильной степени зависящей от напряжения (осветительная, бытовая). В тех случаях, когда нагрузка расположена между центром качаний и шинами энергообъединения, снижение возбуждения генераторов приемной энергосистемы приводит одновременно к удалению нагрузки от центра качаний и увеличению напряжения на нагрузке в асинхронном режиме, что улучшает условия ее работы.
При анализе областей применения этого способа ресинхронизации следует, естественно, учитывать те ограничения, которые возникают из-за снижения напряжения на шинах собственных нужд станций и на шинах части потребителей, расположенных между центром качаний и шинами приемной энергосистемы. Применение этого способа в таких условиях целесообразно лишь в том случае, если это не приводит к нарушению работы собственных нужд станции и массовому отключению потребителей или нарушению их устойчивости.
Этот способ ресинхронизации может применяться и в сочетании с другими способами (АЧР, частотный пуск и др.). Окончательному решению вопроса о применении этого способа ресинхронизации должен предшествовать не только анализ условий результирующей устойчивости и условий работы нагрузки, но и анализ устойчивости сложной по структуре приемной энергосистемы, если в ней осуществляется такое мероприятие. Частичное снижение возбуждения для обеспечения результирующей устойчивости энергосистем с дефицитом мощности пока что еще не нашло применения. Однако после внедрения цифровых регуляторов возбуждения этот способ обеспечения устойчивости, по-видимому, сможет применяться достаточно широко.
Для обеспечения ресинхронизации приемных энергосистем, в которых значительную часть мощности составляют синхронные компенсаторы, широко используется отключение этих агрегатов или временное снятие с них возбуждения (с последующим включением или подачей возбуждения после ресинхронизации). Это мероприятие фактически приводит к некоторому снижению эквивалентной э. д. с. приемной энергосистемы, что, как было показано выше, способствует ее втягиванию в синхронизм. Другая цель этого мероприятия — предотвратить наблюдавшееся в ряде аварийных режимов повреждение выпавших из синхронизма синхронных компенсаторов. Этот агрегат не имеет первичного двигателя, после нарушения синхронизма ресинхронизация возбуждённого СК обычно не происходит, и компенсатор сильно затормаживается (иногда его частота падает до 20—30 Гц); при этом, как показывает анализ аварий, повреждаются в первую очередь демпферные контуры в поперечной оси.
Отключение СК наиболее эффективно при мощности более 30—40% мощности приемного узла* и больших активных сопротивлениях линий.
* Имеется в виду соотношение реактивной мощности синхронных компенсаторов и активной мощности генераторов этого района.
Ликвидации дефицита и обеспечению ресинхронизации способствуют также такие мероприятия, как пуск остановленных гидроагрегатов при понижении частоты (частотный пуск) и перевод гидрогенераторов, работающих в режиме СК, в режим выдачи активной мощности. Время мобилизации резервной мощности в зависимости от типов агрегатов составляет 10—30 с для перевода в активный режим из режима СК и 50—90 с для автоматического пуска из неподвижного состояния, самосинхронизации и набора нагрузки, т. е. это время достаточно велико. Кроме того, если запускаемые агрегаты находятся вблизи центра качаний, то они могут не войти в синхронизм. Для предотвращения подобных явлений должны быть установлены устройства контроля напряжения и успешности самосинхронизации [38].
Указанные выше мероприятия по мобилизации резерва в силу длительного времени их реализации целесообразно применять в комплексе с мероприятиями, обеспечивающими более быструю ликвидацию нарушения режима (ресинхронизация с помощью отключения нагрузки, делительная автоматика), в то же время они позволяют снизить объем отключаемой нагрузки и сократить перерыв в питании отключенных потребителей за счет создания условий для работы ЧАПВ.
Приведем несколько примеров восстановления нормальной работы дефицитных энергосистем после нарушения синхронизма.
Одессаэнерго и Молдавэнерго в течение нескольких лет были соединены с энергообъединением Юга линией 110 кВ с предельной передаваемой мощностью около 130 МВт. Электростанции этих энергосистем (до ввода в действие Молдавской ГРЭС) выдавали мощность 350—400 МВт, а около 100 МВт принималось из энергообъединения. При отключении межсистемной электропередачи производилось ее повторное включение с помощью НАПВ. За время паузы НАПВ часть нагрузки отключалась в результате действия АЧР.

Рис. 3-39. Ресинхронизация приемной энергосистемы после работы АЧР.

Рис. 3-40. Зависимости длительности асинхронного режима от величины отключаемой нагрузки.
После включения линии собственная мощность Р22 этих энергосистем была существенно меньше, чем мощность нагрузки перед включением (см. кривые рис. 3-29), поэтому ресинхронизация происходила быстро и основная часть отключенной нагрузки с помощью ЧАПВ подключалась вновь. При нарушениях статической устойчивости, происходивших довольно часто, так как диспетчер не всегда успевал вводить ограничения потребителей при наступлении максимума нагрузки, также за счет действия АЧР обеспечивалась быстрая ресинхронизация, а затем основная часть потребителей вновь подключалась к системе в результате действия ЧАПВ.
На рис. 3-39 показана запись регистрирующего частотомера во время одного из таких нарушений устойчивости. Как видно из этой записи, ресинхронизация произошла через 27 с. При этом отключенная от АЧР мощность составила около 60 МВт. В асинхронном режиме напряжение в энергосистеме понижалось кратковременно лишь на 15—20%. Если бы в этом случае применялась делительная автоматика и АПВУС, то пришлось бы отключать потребителей мощностью около 110— 120 МВт и время перерыва питания для этих потребителей было бы на 20—30 с больше.
Второй пример относится к другой энергосистеме — Омскэнерго, которая также в течение нескольких лет потребляла из ОЭС Сибири до 25% мощности. Для определения мощности нагрузки, которую требуется отключать для обеспечения ресинхронизации, было проведено исследование на специализированной АВМ «Дельта». В результате проведенных расчетов была получена зависимость времени ресинхронизации от мощности нагрузки, отключаемой АЧР (рис. 3-40). Как видно из этой кривой, отключение 20—30% нагрузки обеспечивает достаточно быструю ресинхронизацию. Однако дефицит мощности также имеет примерно такое же значение. Следовательно, в данном случае применение ресинхронизации за счет действия АЧР по сравнению с использованием АПВУС может дать эффект только в сокращении времени перерыва питания. Поскольку в этой энергосистеме основные потребители находятся далеко от центра качаний, то такое решение является целесообразным.
Рассмотрим теперь те случаи, когда отключение нагрузки недостаточно эффективно или же нецелесообразно вследствие того, что при этом в значительной степени понижается генерируемая мощность. Характерным примером является нарушение устойчивости энергорайона, описанное в гл. 1 (см. рис. 1-4). Нагрузка этого района покрывалась примерно на 50% за счет местных ТЗЦ и на 50% за счет приема мощности из ОЭС по двум линиям 220 кВ и линии МО кВ. Вследствие отключения обеих линий 220 кВ (отключение шин подстанции 220 кВ из-за к. з. в результате поломки изолятора) возник асинхронный режим по оставшейся в работе линии 110 кВ малой пропускной способности. Действие АЧР в данном случае, как показал последующий анализ, не могло обеспечить ресинхронизацию (было отключено около 30% нагрузки энергорайона) вследствие значительного активного сопротивления линий электропередачи (потери активной мощности в асинхронном режиме составили около 20% нагрузки района).

Рис. 3-41. Зависимости изменения частоты во времени.
1 — авария; 2 — расчет при частичном снижения возбуждения генераторов и отключении части нагрузки от АЧР.
Изменение частоты в энергорайоне (полученное обработкой осциллограммы) показано на рис. 3-41 (кривая 1). Для того чтобы предотвратить подобные случаи, можно было бы или значительно увеличить мощность нагрузки, отключаемой АЧР, или понизить возбуждение на генераторах энергоузла для обеспечения ресинхронизации. Поскольку в этом энергорайоне значительное число потребителей, не подключенных к АЧР, потребляла также и тепло от ТЭЦ и их подключение к АЧР только ухудшило бы положение из-за последующего сброса мощности ТЭЦ, более эффективным в данном случае является снижение возбуждения генераторов одновременно с отключением части нагрузки, не связанной с потреблением пара, от АЧР. На рис. 3-41 (кривая 2) показано, как происходило бы изменение частоты, если бы при частоте 47,0—47,5 Гц возбуждение генераторов было снижено на 15—20% и вновь поднято после ресинхронизации. Статическая устойчивость в послеаварийном режиме была бы обеспечена за счет отключения нагрузки от АЧР в процессе ресинхронизации (в объеме, несколько большем, чем при аварии, около 40% нагрузки). Как видно из приведенной расчетной кривой, восстановление нормальной работы потребителей произошло бы достаточно быстро.