§ 2. Аварийные случаи в ГЭУ из-за недостатков их систем возбуждения и резких колебаний нагрузки дизель-генераторов
Аварийные случаи в ГЭУ при ходе судна в ледовых условиях.
В практике работы ледоколов и судов ледового плавания имеется множество случаев поломок гребных винтов и валов, что приводит к весьма большим материальным затратам. Так, на судах Мурманского морского пароходства с 1960 по 1970 г. отмечалось от 10 до 15 аварийных повреждений гребных винтов за каждую арктическую навигацию. Особенно частыми повреждения гребных винтов и даже валов были на ледоколах типа «Капитан Белоусов», имеющих два носовых и два кормовых гребных винта. На ледоколе «Капитан Воронин» за 1956— 1976 гг. отмечено около 30 случаев поломки винтов и лопастей и 5 случаев поломки гребных валов. Большое количество повреждений объяснялось не только малой мощностью названных ледоколов, но и другими недостатками их ГЭУ, которые будут рассмотрены ниже.
Появление более мощных ледоколов, при создании ГЭУ которых учитывался опыт работы и современные возможности автоматизации, приводит к постепенному снижению общего количества аварийных повреждений винтов. Однако число таких повреждений все еще велико.
Причинами аварийных повреждений гребных винтов и валов в ледовых условиях может быть сложный комплекс обстоятельств, связанных с мощностью и маневренными качествами гребных установок и судна, ледовой обстановкой, опытом судоводителей и т. д. Число таких случаев может быть значительно снижено за счет выбора оптимальных систем возбуждения и управления.
Наибольшее количество аварий, приходящихся на одно судно, отмечено на ледоколах типа «Капитан Белоусов», где в схеме возбуждения ГЭУ использован двухобмоточный возбудитель генераторов, и ледоколов типа «Москва» с трехобмоточным возбудителем генераторов. ГЭУ судов с более современной (быстродействующей) системой возбуждения (например, ледокола «Киев») имели значительно меньшее количество аварий.
Надежность и эффективность работы ГЭУ при взаимодействии гребного винта со льдом следует рассматривать как один из основных критериев при выборе оборудования ГЭУ судов, работающих во льдах, и особенно системы автоматического управления. От надежности и технического совершенства ГЭУ ледоколов и судов ледового плавания зависит экономическая эффективность эксплуатации проводимых судов.
Специфика работы винта во льдах, тяжелый характер протекания переходных процессов выдвигают повышенные требования к механическим характеристикам ГЭУ судов активного ледового плавания по сравнению с характеристиками ГЭУ судов неледового плавания. Практически проводка караванов в условиях крупнобитых многолетних льдов Арктики осуществляется при скорости судна около 5—6 уз. Учитывая, что работа ледоколов и судов активного ледового плавания протекает в основном в ледовых условиях, можно прийти к выводу, что за номинальный режим работы ГЭУ указанных судов следует принять режим, соответствующий скорости судна примерно 5—6 уз.
Основное требование, предъявляемое к ГЭУ судов, работающих во льдах, заключается в необходимости автоматически изменять электромагнитный момент гребного электродвигателя в режиме резких изменений момента, сопротивления вращению гребного винта при неизменной частоте вращения первичных двигателей. При этом регулирование должно осуществляться по закону постоянства мощности установки в широком диапазоне изменения момента сопротивления винта от хода в свободной воде до режимов, лежащих выше швартовной характеристики.
Ледоколам и судам ледового плавания очень часто приходится работать в условиях шуги, особенно в арктической навигации и акваториях замерзающих портов, где скапливается большое количество мелкобитых набивных льдов. Для обеспечения постоянства мощности на регулируемом участке характеристики должно выполняться условие постоянства произведения момента на валу ГЭД на его частоту вращения, что представляет собой аналитическое выражение гиперболы постоянства мощности при работе судна от хода в свободной воде в установившихся режимах работы до моментов сопротивления винта, лежащих выше швартовной характеристики.

Рис. 6. Характер изменения момента и мощности ГЭД и суммарного момента сопротивления вращению гребного (бортового) электродвигателя ГЭУ ледокола «Москва» при работе на полной мощности.
Идеальной системой автоматического управления ГЭУ, обеспечивающей отсутствие перегрузок при работе в условиях взаимодействия гребного винта со льдом, будет система, при которой в любой момент работы ГЭУ выполняется уравнение
Р = kМдnд = const, (1)
где Мд—момент ГЭД; nд — частота вращения ГЭД; k — коэффициент пропорциональности.
Одной из главных особенностей работы ГЭУ судов ледового плавания является непрерывное изменение момента сопротивления вращению гребного винта вследствие взаимодействия его
со льдом. Как показали расчеты и многочисленные испытания, момент сопротивления на винте ∑MС при взаимодействии гребного винта со льдом может достигать значений, в несколько раз превышающих значения номинального момента ГЭД за счет динамических нагрузок, вызываемых попаданием льдины под лопасти винта и ударов корпуса судна о лед (рис. 6). Эти нагрузки в отдельные моменты могут возрастать и создавать опасность для лопастей гребного винта и остальных элементов гребного электропривода. Причем время нарастания ледового момента Мл до максимального значения может достигать 0,8—1,3 с, а в некоторых случаях даже менее 0,8 с. Обычно продолжительность действия ледового момента составляет 3-7 с.
Моменты сопротивления на гребном валу в динамических режимах ГЭУ при взаимодействии винта со льдом могут быть определены исходя из уравнения динамического равновесия моментов гребного электропривода:
![]() (2)
(2)

Рис. 7. Зависимость моментов сопротивления вращению бортового гребного винта ледокола «Киев» от изменения частоты вращения ГЭД.
где![]() —маховый момент вращающихся частей гребного электродвигателя, гребного вала, винта и увлекаемых винтом масс воды и льда; Mτρ— момент трения (в расчетах может быть учтен как постоянный коэффициент).
—маховый момент вращающихся частей гребного электродвигателя, гребного вала, винта и увлекаемых винтом масс воды и льда; Mτρ— момент трения (в расчетах может быть учтен как постоянный коэффициент).
Приближенное значение суммарного момента сопротивления вращению винта ∑MС в любой момент времени может быть найдено, если, кроме Мд, располагать значением первой производной частоты вращения гребного винта dn/dt. Это значение получается дифференцированием кривой изменения частоты вращения гребного винта во времени. Следовательно, 2МС может быть определен экспериментальным путем. Полученный суммарный момент сопротивления включает в себя момент Мл, необходимый для разрушения льда лопастью гребного винта, и момент сопротивления Мв, возникающий при вращении винта в воде. Для определения ледового момента из выражения
![]()
необходимо располагать зависимостью MB=f(nд;t) в неустановившихся режимах работы гребного винта.
Следует отметить, что гидродинамические процессы, происходящие в данном случае, отличаются большой сложностью, и точное их аналитическое определение весьма трудно. Вместе с тем, значение Мв при заклиниваниях гребного винта значительно меньше Мп, поэтому момент сопротивления Мв с достаточной степенью точности может быть определен по общеизвестным методикам.
Функция Mn=f(nд) может быть получена и аналитическим путем [8]. Как видно на рис. 7, функция Мл=f(nд) имеет нелинейный характер.
На участке bd разрушение льда лопастью гребного винта происходит посредством смятия и скалывания. На участке befg лед разрушается смятием.
Отрезок ef соответствует нулевому упору винта по ледовому моменту. Частота вращения гребного винта, соответствующая отрезку ef, для каждой конкретной установки определяется с учетом скорости судна в момент взаимодействия гребного винта со льдом. С увеличением принятой расчетной скорости судна участок ef будет сдвигаться вправо, а с уменьшением — влево. В расчетах принимаются предельно возможные моменты сопротивления движению винта. Характеристика ледового момента на участке fg отличается неустойчивостью, так как уменьшению частоты вращения гребного винта на этом участке способствует увеличение момента сопротивления, причем участок fg имеет значительную крутизну.
При работе гребного винта на участке ef характеристики ледового момента упор винта относительно льда равен нулю, поэтому при длительной работе гребной установки в этом режиме скорость судна будет снижаться, что нежелательно при работе в ледовых условиях.
Анализ повреждений гребных винтов и валов ледоколов и судов ледового плавания показал, что чаще они происходят либо после остановки винта, либо, когда направление вращения винта не соответствует направлению хода судна, т. е. когда направление хода судна из-за инерционности не соответствует положению поста управления. Остановка гребного винта при движении судна во льдах представляет собой наибольшую опасность; она может привести к поломке гребного винта или вала, поскольку при неподвижном винте его лопасти воспринимают деформацию изгиба и ломаются под действием массы движущегося судна. Следовательно, при повышении момента сопротивления вращению винта гребной электродвигатель должен развивать также повышенный момент, чтобы предотвратить понижение частоты вращения гребного винта до заклинивания, т. е. до полной остановки. При этом система автоматического управления ГЭУ не должна допускать динамических всплесков тока якорей электрических машин выше максимально допустимого, исходя из условий коммутации и нагрева.
Система возбуждения ГЭУ должна также обеспечить благоприятные условия работы первичных двигателей (стабильность их частоты вращения и отсутствие недопустимых перегрузок). От правильного выбора механической характеристики ГЭД во многом зависит эффективная и безаварийная работа судов, плавающих во льдах. Желательно, чтобы механическая характеристика ГЭД проходила выше точки а характеристики суммарного момента сопротивления винта (рис. 7).
Если механическая характеристика ГЭД проходит ниже характеристики суммарного момента сопротивления, ГЭУ не преодолеет максимально возможные повышенные моменты сопротивления вращению винта и вероятность заклинивания гребного винта при взаимодействии со льдом будет значительна.
Проведенные расчеты ледового момента и механических характеристик ледоколов «Капитан Воронин» и «Москва» показали, что они не удовлетворяют этим требованиям, и это, естественно, сказывается на характере переходных процессов их ГЭУ при работе во льдах. За время эксплуатации ледоколов этих типов было зафиксировано сравнительно большое число случаев заклиниваний гребных винтов.
Срабатывания защиты при понижении или повышении частоты вращения дизель-генератора ГЭУ, максимальной защиты и т. д. нежелательны не только с точки зрения безопасности плавания судна, но и с точки зрения вероятности повреждения гребных винтов и валопроводов.
При работе гребного винта в мелкобитых льдах на лопастях винта возникает дополнительный момент сопротивления вращению гребного винта. При этом суммарный момент сопротивления на гребном валу может значительно превышать номинальный, соответствующий швартовному режиму. В этом случае гребной винт как бы работает в более плотной среде.
Анализ материалов по главным машинам ГЭУ позволяет сделать вывод о том, что обычно ограничивающим звеном при работе гребного электропривода в условиях взаимодействия винта со льдом является дизель, если при этом достаточно удовлетворительно решены вопросы коммутации главных электрических машин. Так, электрические машины ГЭУ ледокола «Капитан Белоусов» допускают 10% перегрузки по току в течение 4 ч, 25% перегрузки в течение 2 ч, 50%—в течение 30 мин. Электрические машины ГЭУ ледокола «Ленинград» допускают 25% перегрузки в течение 30 мин, 50%—в течение 9 мин, 80% — в течение 2 мин.
Электрические машины ГЭУ ледокола «Киев» допускают двухкратную перегрузку по току в течение 1,5 мин. Перегрузочные же способности дизелей сравнительно ограничены. Так, например, главные дизели ледокола «Киев» допускают всего 10% перегрузки в течение часа и 20% кратковременно в течение нескольких минут. Момент сопротивления на валу первичного двигателя в ГЭУ определяется электромагнитным моментом генератора Мг.
Приведенные данные говорят о том, что величина и время действия тока главной цепи ГЭУ [1] лимитируются в первую очередь перегрузочными способностями дизеля по моменту. Вместе с тем перегрузки и соответственно колебания частоты вращения дизелей вызывают ухудшение режима сгорания топлива, увеличение теплонапряженности цилиндро-поршневой группы дизелей, увеличивают их износ и приводят к сокращению моторесурса.
Исходя из вышеизложенного, можно заключить, что система возбуждения ГЭУ должна обеспечить также и благоприятные условия работы дизелей. С этой целью в ГЭУ некоторых электроходов применены эффективные обратные связи для ограничения всплесков тока главной цепи.
Уместно в данном случае привести следующий пример. На дизель-электроходе «Лена» главные генераторы допускают перегрузку 1,5 Iном в течение 1 мин. В то же время максимальная защита настроена на ток 1,43 Iном=5000 А. Таким образом, возможности форсировки момента гребного электродвигателя за счет форсировки тока главной цепи здесь не использованы.
Работа дизель-генераторов ГЭУ при ходе судна во льдах протекает следующим образом. При ударе винта о лед момент генератора за счет повышения тока главной цепи (в результате понижения частоты вращения ГЭД) и сохранения почти первоначального значения тока возбуждения генератора увеличивается. Через некоторое время, определяемое инерционностью системы возбуждения генераторов, как реакция системы возбуждения ГЭУ на возмущение происходит размагничивание и соответственно понижение момента генераторов. Всплеск момента генератора Мг вызывает перегрузку дизеля и в разной степени для разных ГЭУ понижение частоты его вращения. При уменьшении Мг частота вращения дизель-генератора увеличивается. Таким образом, обычно при ходе во льдах имеет место колебательный характер изменения частоты вращения дизель- генераторов.
Учитывая сказанное о режимах работы ГЭУ при ходе судна во льдах, сопоставим материалы эксплуатации и испытаний гребных электроустановок различных типов судов. Практика показала, что ГЭУ ледоколов типа «Капитан Белоусов» (с двухобмоточным возбудителем генераторов) в ледовых условиях работают недостаточно удовлетворительно. При испытаниях этого ледокола в апреле 1956 г. максимальная защита за двое суток сработала 92 раза, а в июле 1958 г. за трое суток около 200 раз, в результате чего было отмечено 18 полных заклиниваний гребного винта.
На однотипном ледоколе «Капитан Мелехов» в июле 1958 г. за 10 суток максимальная защита сработала 557 раз, причем наблюдались 24 случая полного заклинивания гребного винта. Во время работы ГЭУ ледокола «Капитан Воронин» в Арктике также наблюдались многочисленные срабатывания максимальной защиты и заклинивания гребных винтов.
Осциллограмма динамики параметров носового контура ГЭУ ледокола «Капитан Воронин» приведена на рис. 8. Как видим, процесс торможения гребного винта под действием льда характеризуется постепенным уменьшением частоты вращения ГЭД nд, причем в отдельные промежутки времени она вновь повышается, а затем понижается. Соответственно этому происходит изменение тока главной цепи I. Вначале происходят его увеличение и форсировка движущего момента гребного электродвигателя Мд, который почти повторяет кривую тока I, поскольку форсировка магнитного потока ГЭД Фд незначительна. Одновременно с этим наблюдается перегрузка установки по мощности Р.
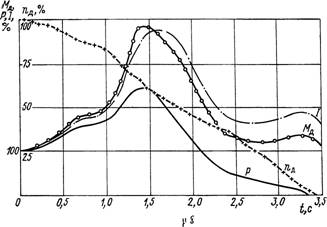
Рис. 8. Изменение параметров носового контура ГЭУ ледокола «Капитан Воронин» при ходе во льдах.
В течение времени, определяемого инерционностью цепи возбуждения генераторов, происходит размагничивание их за счет обратной связи по току главной цепи. При этом значения тока главной цепи, момента ГЭД и мощности падают даже ниже своих номинальных значений. Таким образом, создаются неблагоприятные условия для преодоления повышенного (за счет ледового момента) момента на валу ГЭД и происходит заклинивание гребного винта. Всплеск тока главной цепи достигает значения 3,8 Iном/
Недостаточно удовлетворительно работают также ГЭУ ледоколов типа «Ленинград» с трехобмоточным возбудителем генераторов. Так, за время работы ледокола «Москва» с 17 июня 1961 г. до 23 июля 1961 г. было зафиксировано 18 случаев отключения главных генераторов из-за снижения их частоты вращения при перегрузке во время взаимодействия гребных винтов со льдом. На ледоколе «Ленинград» за период с 12 по 24 июня 1962 г. по той же причине зафиксировано 14 случаев отключения главных генераторов. Как видим на рис. 9, в ГЭУ этих ледоколов также имеют место большие всплески тока I и момента двигателя Мд. Изменения момента Мд аналогичны изменению тока главной цепи, поскольку магнитный поток Фд форсируется изменение тока главной цепи. Вначале происходят его увели- исходят перегрузка дизелей по мощности Р и соответственно значительные колебания их частоты вращения.
 .
.
Рис. 9. Изменение параметров бортового контура ГЭУ ледокола «Москва» при ходе во льдах.
Осциллограмма, приведенная на рис. 9, снята при ходе ледокола во льдах сплоченностью 10 баллов, толщиной 0,8—3 м при работе всех восьми дизель-генераторов.
Значительно успешнее работают в условиях взаимодействия гребного винта со льдом ГЭУ судов типа «Лена» (рис. 10 и табл. 1). Всплески тока и колебания частоты вращения их дизель-генераторов малы по сравнению с ГЭУ выше указанных ледоколов. Это объясняется в первую очередь меньшей инерционностью цепи возбуждения генераторов, большим коэффициентом усиления возбудителей, возможностью значительной дефорсировки возбуждения генераторов. Постоянная времени обмотки возбуждения генератора ГЭУ дизель-электрохода «Лена» имеет наименьшее значение. Кроме того, в цепи обмотки возбуждения генератора ГЭУ дизель-электрохода «Лена» имеется сопротивление для регулирования нагрузки первичного двигателя (при обычных эксплуатационных режимах оно достигает значения 4 Ом).
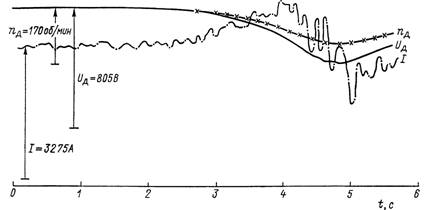
Рис. 10. Изменение параметров ГЭУ дизель-электрохода «Лена» при ходе во льдах. (В схеме три генератора на два ГЭД).
Благодаря этому постоянная времени цепи возбуждения генераторов снижается до 0,88 с, что благоприятно сказывается на работе ГЭУ в ледовых условиях.
На работу ГЭУ влияет наличие значительного суммарного махового момента вращающихся масс линии гребного вала ∑GD2. Ледовый момент Мл пропорционален диаметру гребного винта. Из сравниваемых судов наибольшую мощность Р, приходящуюся на один винт, имеют ГЭУ судов типа «Лена», что важно с точки зрения преодоления повышенного момента сопротивления. Так, по сравнению с ледоколом «Москва» на судах типа «Лена» номинальная мощность одного винта в 1,7 раза больше несмотря на то, что диаметр его меньше. Поэтому ГЭУ судов типа «Лена» обеспечивают сравнительно благоприятные условия работы первичных двигателей при взаимодействии гребного винта со льдом.
Параметры различных типов ГЭУ и результаты их испытаний
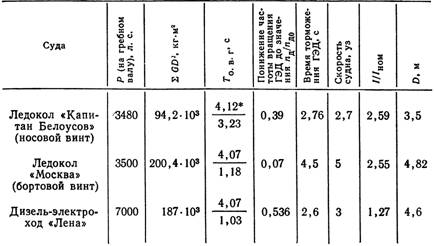
* В числителе указаны значения для прямолинейной части характеристик ГДГ, в знаменателе — для точки, соответствующей номинальному режиму.
Испытания ГЭУ ледокола «Киев» в Финском заливе и при работе по проводке судов в арктических навигациях дали удовлетворительные результаты. Система возбуждения ГЭУ этого ледокола имеет весьма сильные коррекции по первой производной от тока главной цепи.
На ледоколах «Москва» и «Ленинград» имеют место провалы тока главной цепи, а следовательно, и движущего момента ГЭД ниже номинального в период продолжающегося заклинивания гребного винта. На ледоколе «Киев» понижения движущего момента ГЭД при продолжающемся заклинивании гребного винта не наблюдается (рис. 11), чем объясняется незначительное количество заклиниваний.
На рис. 11 представлены графики изменения параметров ГЭУ левого гребного винта ледокола «Киев» при работе во льдах. В схеме восемь генераторов. Исходные данные для построения графиков следующие: ток главной цепи I=3600А, напряжение ГЭД (Uд=1200 кВт, частота вращения левого ГЭД Пд=155 об/мин, момент ГЭД Мд=34,7-104 Н-м, частота вращения дизель-генератора nг=330 об/мин.
При работе ледокола «Киев» в условиях взаимодействия гребного винта со льдом отмечены значительные всплески тока главной цепи до 2,34 номинального. Примерно такие же значения были получены во время испытаний ГЭУ ледокола «Москва» в арктические навигации I960 и 1961 гг. при сравнительно одинаковых условиях. Броски мощности ГЭУ на ледоколе «Киев» в отдельные моменты достигали двухкратного номинального значения, т. е. имели место значительные, хотя и кратковременные перегрузки первичных двигателей.
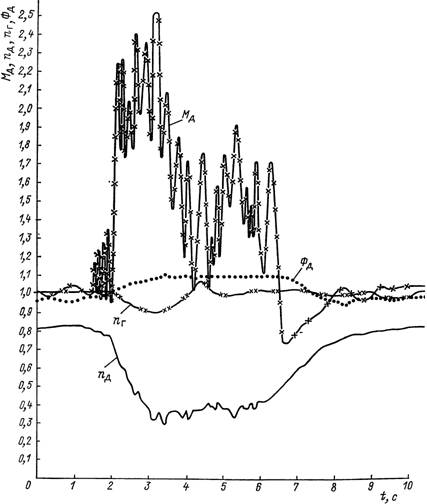
Рис. 11. Изменение параметров ГЭУ левого гребного винта ледокола «Киев» при работе во льдах.
Так, перегрузка дизелей по моменту Мг на ледоколе «Киев» в течение 1,8 с составляла 2,27 ном (рис. 12), при частоте вращения дизель-генератора nг=0,93 nг. ном. В данном случае диапазон колебаний частоты вращения составил 9,7% (с учетом подгона дизеля при уменьшении момента сопротивления на его валу). Таким образом, колебания частоты вращения дизель-генераторов при этом незначительны, а поэтому невелико и число срабатываний защиты от понижения частоты вращения дизель-генераторов по сравнению с ГЭУ ледоколов «Москва» и «Ленинград». За период арктической навигации с 1 июля 1966 г. по 22 октября 1966 г. защита от снижения частоты вращения главных дизель-генераторов ледокола «Киев» срабатывала 8 раз. Максимальное значение движущего момента гребного двигателя достигало значения, равного 2,5 номинального (см. рис. 11). За номинальный момент принят момент в швартовном режиме.
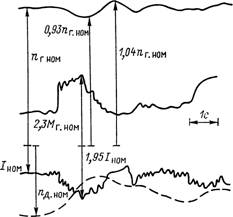
Рис. 12. Изменение параметров ГЭУ левого гребного винта ледокола «Киев» при ходе во льдах. (В контуре два генератора).
Форсировка движущего момента ГЭД в ГЭУ ледокола «Киев» также достигается в основном за счет увеличения тока главной цепи. Увеличение движущего момента гребного двигателя при возрастании магнитного потока несмотря на значительные форсировки тока возбуждения не превышает 11%, так как ГЭД работает в зоне, близкой к насыщенному состоянию его магнитной системы. Вследствие инерционности системы возбуждения ГЭД форсировка происходит с существенным запаздыванием.
Таким образом, динамические характеристики ГЭУ ледокола «Киев» удовлетворяют требованиям к работе в условиях взаимодействия гребного винта со льдом более, чем аналогичные характеристики ГЭУ вышеуказанных ледоколов.
Проанализируем, за счет чего получено такое существенное с точки зрения аварийности гребных установок улучшение динамических характеристик ГЭУ. Кроме усовершенствования системы возбуждения на ледоколе «Киев» были увеличены маховые массы главных дизель-генераторов посредством навешивания на их валы маховиков массой по 6,7 · 103 кг. Представляет интерес определить степень влияния этих факторов на улучшение динамики ГЭУ. Значение махового момента дизель-генератора на ледоколе «Киев» в 2,3 раза больше, чем на ледоколе «Москва». Различия гребных винтов указанных ледоколов незначительны и существенного влияния на динамику ГЭУ в условиях хода во льдах не оказывают.
На рис. 13 и 14 приведены осциллограммы переходных процессов в ГЭУ ледокола «Киев», полученные на аналоговой модели для случая заглубления лопастей гребного винта в лед на половину их длины при различных маховых массах дизель-генераторов. Изменение момента сопротивления вращению гребного винта принималось согласно рис. 6.
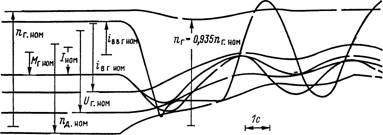
Рис. 13. Изменение параметров ГЭУ ледокола «Киев», полученных математическим моделированием, при GD2>=21 000 кг · м2.
Как видно из рис. 13 и 14, всплески тока главной цепи достигают значений (2,4—2,5)Iном, что совпадает с результатами, полученными при натурных испытаниях.
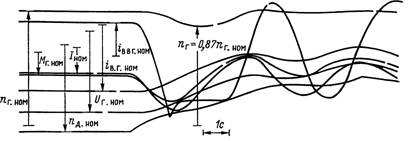
Рис. 14. Изменение параметров ГЭУ ледокола «Киев», полученных математическим моделированием, при GD2>=9165 кг · м2.
С целью исследования влияния маховиков было произведено математическое моделирование работы ГЭУ во льдах при одной и той же системе возбуждения (на магнитных усилителях), но при разных значениях суммарного махового момента дизель- генератора: 21 000 кг-м2 (ГЭУ ледокола «Киев») и GD2=9165 κγ·μ2 (ГЭУ ледокола «Москва»).
Из сравнения рис. 13 и 14 видно, что применение маховиков в ГЭУ ледокола «Киев» позволило значительно повысить стабилизацию частоты вращения дизель-генератора. Таким образом, улучшение динамических характеристик ГЭУ ледокола «Киев» по сравнению с ГЭУ ледокола «Москва» достигнуты не только за счет изменения системы возбуждения, но и в значительной мере за счет применения маховиков, навешенных на валы дизель-генераторов. Математическое моделирование работы ГЭУ показало, что увеличение суммарного махового момента за счет маховика до трехкратного значения существенно влияет на динамику дизель-генератора.
Учитывая эффективность применения маховиков даже при сравнительно совершенных системах возбуждения, рассмотрим вопрос выбора маховых масс дизель-генераторов ГЭУ судов, работающих во льдах. С одной стороны, значительные колебания частоты вращения дизель-генераторов нежелательны из-за увеличения вероятности срабатывания защиты от снижения частоты вращения, так как это часто приводит к аварии гребных установок. С другой стороны, для преодоления значительного ледового момента необходима форсировка движущего момента ГЭД. Как известно, последний определяется выражением
![]()
Поэтому необходимую форсировку Мд можно получить за счет увеличения тока главной цепи и магнитного потока ГЭД Фд. Последний способ эффективен при работе гребного электродвигателя в номинальных режимах в зонах, значительно отстоящих от зоны насыщения. В ГЭУ ледоколов и судов ледового плавания гребные двигатели, как было сказано ранее, работают в режимах, близких к насыщенному состоянию магнитной системы. Увеличение форсировки Фд связано с увеличением массы, стоимости, размеров ГЭД, а также инерционности его цепи возбуждения. Поэтому целесообразно форсировку движущего момента ГЭД обеспечить за счет допустимых всплесков тока главной цепи. Перегрузочные способности электрических машин ГЭУ довольно велики, и форсировки тока главной цепи лимитируются в основном перегрузочными способностями дизелей.
Итак, налицо два противоположных обстоятельства: для преодоления повышенного момента сопротивления на гребном винте необходима форсировка движущего момента ГЭД, а следовательно, форсировка тока главной цепи; в то же время повышение тока является весьма нежелательным, так как оно вызывает чрезмерные колебания частоты вращения дизеля, а перегрузочные способности дизеля незначительны. Поэтому в данном случае эффектным представляется использование накопленной кинетической энергии системы дизель — маховик — генератор.
Степень понижения частоты вращения при перегрузке дизеля может быть определена интегрированием уравнения динамического равновесия моментов дизеля Мдз и генератора Мг:
![]()
(3)
где![]() — суммарный маховый момент генератора, первичного двигателя и маховика.
— суммарный маховый момент генератора, первичного двигателя и маховика.
Энергия, которая может быть получена за счет некоторого допустимого понижения частоты вращения первичного двигателя, определяется по формуле
![]() (4)
(4)
где Jд.г—момент инерции дизель-генератора; ω1, ωдоп— соответственно первоначальная и допустимая угловая частота вращения дизель-генератора; ηд.г — КПД дизель-генератора, учитывающий лишь трение.
Учитывая, что![]() 9 формулу (4) можно привести к более удобному для практических расчетов виду:
9 формулу (4) можно привести к более удобному для практических расчетов виду:
![]() (5)
(5)
Условие допустимой перегрузки первичного двигателя определится уравнением
![]() (6)
(6)
где tn — время, в течение которого мощность превышает номинальную.
Поскольку возможности перегрузки ГЭУ ограничены не столько условиями коммутации электрических машин, сколько ограниченными перегрузочными способностями дизелей, становится очевидным, какое важное значение имеет в данном случае суммарный маховый момент дизель-генератора. Поэтому с целью улучшения динамических характеристик ГЭУ судов, активно работающих во льдах, целесообразно увеличить его за счет навешивания на вал первичного двигателя маховика со значительным маховым моментом. Как показал опыт эксплуатации ГЭУ ледокола «Киев», увеличение махового момента маховика не вызывает осложнений при пуске и переходе частоты вращения ГДГ со ступени на ступень.
При увеличении махового момента дизель-генератора необходимо произвести поверочный расчет крутильных и аксиальных колебаний валовой линии дизеля во избежание работы в зоне резонанса.
Известно, что на крутильные колебания линии вала дизель- генератора влияет в основном маховый момент, а на аксиальные колебания — масса маховика. Поэтому после определения махового момента дизель-генератора следует произвести расчеты колебаний и с учетом всех результатов выбрать номинальные значения массы и формы маховика. Целесообразно при этом выбрать максимально допустимый (с точки зрения конструктивных возможностей установки) диаметр маховика, после чего при выбранном маховом моменте маховика можно будет снизить его массу. Соответствующим увеличением суммарного махового момента ΣGD2д.г за счет повышения махового момента маховика можно добиться того, что значение тока главной цепи будет лимитироваться, главным образом, коммутацией электрических машин. Значительные форсировки момента ГЭД можно получить за счет всплесков тока главной цепи, а стабилизацию частоты вращения первичных двигателей за счет увеличения маховых моментов дизель-генераторов и соответствующего выбора системы управления ГЭУ. Исходя из этого, целесообразно в подобных установках применять компенсированные генераторы и гребные электродвигатели.
В настоящее время существует мнение, что трехобмоточный возбудитель генераторов ГЭУ удовлетворяет требованиям систем возбуждения судов, работающих во льдах. С целью проверки данного суждения было произведено математическое моделирование работы ГЭУ ледокола «Киев» с трехобмоточным возбудителем.
С учетом постоянной времени возбудителя система уравнений принимает вид:
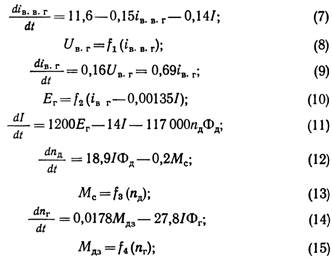
Зависимость (15) нелинейна.
Из сравнения рис. 13 и 15 видно, что в случае применения трехобмоточного возбудителя всплеск тока главной цепи в 1,2 раза больше и провал частоты вращения дизель-генератора достигает значения 0,24nг.ном (при обычной схеме 0,07п). При отсутствии маховиков (рис. 16) частота вращения дизель- генератора понижается настолько (на модели до 0,35nг.ном), что должна сработать защита. Таким образом, система возбуждения ГЭУ с трехобмоточным возбудителем генераторов не может в данном случае обеспечить благоприятной работы ГЭУ при ходе судна во льдах, даже если увеличить маховой момент дизель-генераторов.
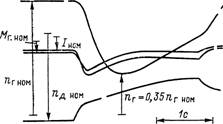
Рис. 15. Изменение параметров ГЭУ ледокола «Киев» с трехобмоточным возбудителем генераторов, полученных математическим моделированием, при GD2=21 000 кг-м2.
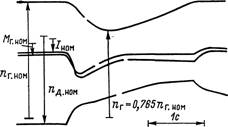
Рис. 16. Изменение параметров ГЭУ ледокола «Киев» с трехобмоточным возбудителем генераторов, полученных математическим моделированием, при GD2=9165 кг · м2.
При проектировании ГЭУ не следует полностью полагаться на результаты испытаний находящихся в эксплуатации судов. Нужно учитывать в первую очередь качественную сторону протекания переходных процессов, поскольку параметры разных ГЭУ могут быть разными. Целесообразно произвести сравнительную оценку проектируемых систем ГЭУ, используя при этом материалы натурных испытаний, опыт эксплуатации и методы математического моделирования.