3. Определение скольжений электродвигателей при восстановлении питания методом последовательных интервалов
Аналитический метод расчета самозапуска. после восстановления питания основан на численном интегрировании методом последовательных интервалов системы дифференциальных уравнений движения (1). Число уравнений соответствует числу электродвигателей, участвующих в самозапуске,
где индексы k, i обозначают соответственно порядковый номер двигателя и номер расчетного интервала. В формулах (7) начальное значение ski равно скольжению, достигнутому электродвигателем к концу выбега.
Из формул (7) следует, что для определения приращения скольжения на расчетном интервале необходимо знать для каждого электродвигателя его электромагнитный момент и момент сопротивления механизма с. н.
§ 4. Определение электромагнитных моментов электродвигателей и моментов сопротивления механизмов собственных нужд
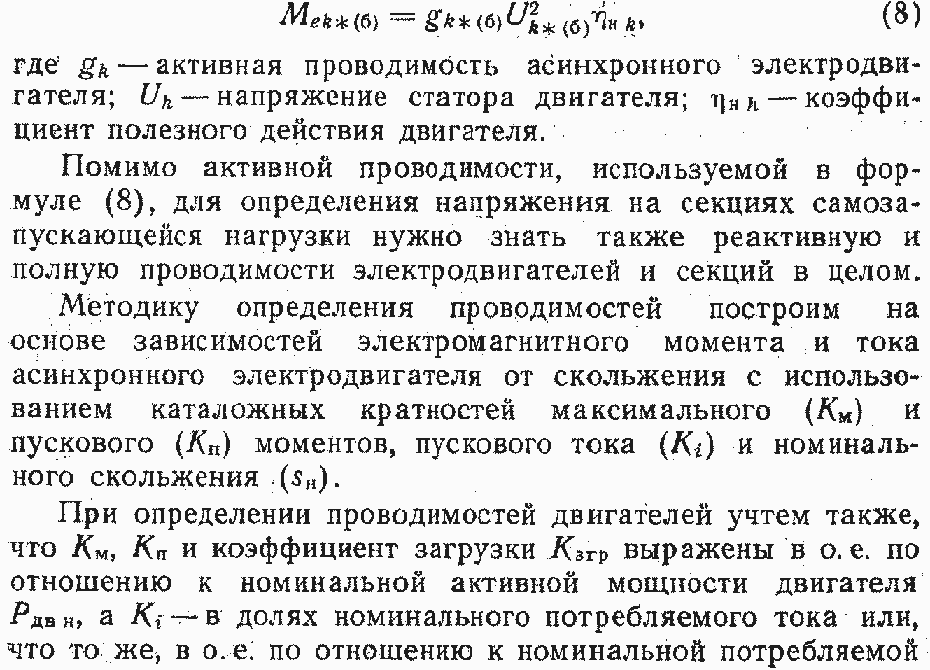
Электромагнитный момент двигателя может быть найден на основе его статической схемы замещения
7
При использовании статической схемы замещения для асинхронных двигателей для определения момента сопротивления механизмов с. н. можно также пользоваться статическими характеристиками. На рис. 2 представлена зависимость момента сопротивления механизма от частоты вращения. Аппроксимацию предлагается осуществлять при помощи следующих универсальных выражений (индексы k, iопущены):

при открытии обратного клапана насосов, работающих на противодавление, выраженные в о. е. по отношению к номинальному моменту агрегата с. н. (индекс «(н)» опущен); nм*, nкл* — частоты вращения, соответствующие минимуму момента сопротивления и открытию обратного клапана; nн* — номинальная частота вращения; р1, р2 — показатели степени характеристики момента сопротивления до и после открытия обратного клапана.
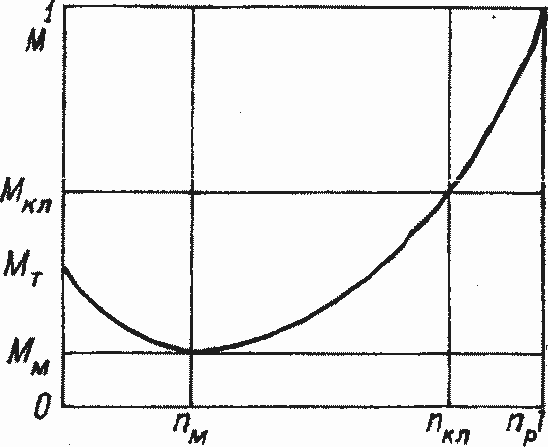
Рис. 2
Момент сопротивления приводят к базисным условиям по формуле
с постоянным моментом сопротивления![]() =
=![]() для насосов, работающих на противодавление,
для насосов, работающих на противодавление,![]() принимают значения, зависящие от доли противодавления в общем напоре, p1 = 2, p2 = 1.
принимают значения, зависящие от доли противодавления в общем напоре, p1 = 2, p2 = 1.
Для механизмов с более сложной характеристикой — целесообразно использовать графические зависимости. В этом случае можно учесть также различие в характере изменения момента сопротивления при понижении и повышении частоты вращения.