Глава 5
АСР МОЩНОСТИ ЭНЕРГОБЛОКОВ С ПРЯМОТОЧНЫМИ КОТЛАМИ 1. РАЗРАБОТКА АСР МОЩНОСТИ ЭНЕРГОБЛОКА С ИСПОЛЬЗОВАНИЕМ МИНИПРОЦЕССОРА
С ростом единичных мощностей агрегатов и увеличенном требований энергосистемы к качеству отработки заданий по нагрузке появляется необходимость в повышении надежности и значительном расширении функций АСР мощности энергоблоков. Это достигается с помощью аналоговых приборов, однако приводит к существенному перерасходу средств (по зарубежным данным примерно на 10%) при сравнении с использованием цифровых устройств, так как построение оптимальных АСР мощности крупных энергоблоков предполагает создание более сложных по своей структуре регуляторов. При этом следует применять вычислительные устройства, логические и нелинейные функциональные преобразователи. Например, оптимизация давления пара на энергоблоке сверхкритических параметров с целью достижения максимального к. п. д. турбины требует оперативного решения ряда нелинейных уравнений [286] и выполнения сложных функций управления [287]. Оптимальное поддержание температуры и давления свежего пара в соответствии с положением регулирующих клапанов турбины, обеспечивающее минимум удельного расхода тепла при сохранении заданного срока службы металла [344], возможно эффективно осуществить только с помощью средств вычислительной техники. В связи с этим регулирование мощности и другие проблемы автоматизации производственных процессов на крупных энергоблоках в настоящее время решаются в неразрывной связи с применением ЭВМ. Уровень развития и опыт освоения автоматизации теплоэнергетических процессов позволяет переходить от автоматизированной системы «информационная вычислительная машина — оператор — регулятор — энергоблок» к разработке и внедрению автоматических систем «управляющая вычислительная машина — регулятор — энергоблок», а также «управляющая вычислительная машина— энергоблок». Выбор ЭВМ по ее техническим характеристикам предлагается осуществлять на основании методики, представленной в работе [288], что обеспечивает сокращение затрат на оборудование.
Использование ЭВМ в схемах автоматизации производственных процессов вносит значительные качественные изменения в работу автоматизируемого объекта, так как в контуре появляется элемент с «памятью», позволяющий накапливать данные о переходных процессах или предсказывать ошибки регулирования, анализ которых позволяет вырабатывать оптимальные корректирующие воздействия [289]. Существенными особенностями цифровых систем являются возможности по диагностике отказов и адаптации к технологическому процессу. Кроме того, следует отметить, что применение управляющих вычислительных машин для автоматизации теплоэнергетических процессов обеспечивает по сравнению с предшествующими решениями более высокие показатели качества работы соответствующих систем (в 2—3 раза), надежности (отдельных узлов на порядок), низкую стоимость (отдельных узлов в 1,5—2 раза) и др.
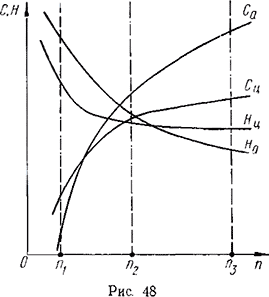
На рис. 48 показаны качественные изменения показателей стоимости С и надежности Н системы (а — аналоговый, ц — цифровой вариант построения) в зависимости от числа возлагаемых на систему функций п. Из рисунка видно, что на участке п1-2 предпочтительнее является аналоговый вариант, на участке п2 — п3—цифровой вариант построения системы регулирования
В работе [290] представлен обзор направлений в облаем разработок и применений ЭВМ. В ближайшие годы предполагается значительное увеличение производства минимашин. При одинаковом объеме производимых функций стоимость минимашин существенно ниже средних ЭВМ. Малые ЭВМ для сбора и передачи информации в центр управления более предпочтительны, чем связь каждого датчика с центральной ЭВМ [291]. Для автоматизации производственных процессов используется 20% малых ЭВМ, для решения технических задач — 19, в качестве коммутаторов, концентраторов — 18, для административного управления— 11, для автоматизации экспериментов — 9% [292]. Количество фирм выпускающих малые ЭВМ, в Великобритании насчитывается 44, в США — 70 [293]. Мирной объем продажи малых ЭВМ в 1972 г. был равен 20 тыс., в 1973 г.—33, в 1974 г.— около 40 тыс. [294].
На данном этапе развития малые ЭВМ характеризуются небольшим объемом, применением интегральных схем с повышенной степенью интеграции, запоминающими устройствами на MOИ-схемах, пакетными накопителями данных на магнитных дисках емкостью порядка 2-106 бит с рабочей частотой 250 кГц, развитыми системами ввода — вывода и сопряжения [295]. Малые ЭВМ и микро-ЭВМ используются, как правило, на нижнем уровне иерархии Развивающаяся технология изготовления больших интегральных схем (БИС) позволяет «встраивать системные изделия» в технологический процесс для информационных и других целей. Например, кристалл зарубежного мультиплексорного дешифратора размером 3,7X3,9 мм2 имеет около 3500 активных элементов Фирмой «Intel» изготовлен микропроцессор на одном кристалле «Intel 8080», который относится ко второму поколению [296]. Ожидается, что возможно появление «гибридного» процессора, который по своим возможностям соответствует мини процессору, а изготовлен как микропроцессор («процессор на кристалле»). Если значительно усложнять архитектуру (состав блоков и взаимных временных связей) микропроцессора, то можно получить неэффективную вычислительную систему. Наиболее распространенными оценками архитектуры любой цифровой системы являются вычислительная мощность и стоимость [297]. Создание новых микропроцессоров изменяет разработку средств математического обеспечения, так как ряд программных функций может быть выполнен вне главной ЭВМ, а программирование для микропроцессоров не требует высокой квалификации специалистов. По данным [298], стоимость микропроцессоров существенно снизится к 1980 г.
В больших системах управления соотношение между количествами используемых аналоговых и цифровых устройств должно обеспечивать наименьшее значение отношения затрат к эффекту. Существует два принципа построения таких систем [299]: первый предусматривает дополнение к аналоговым системам управления в виде ЭВМ, которая в соответствии с программой координирует работу отдельных регуляторов, второй заменяет часть регуляторов непосредственным цифровым управлением объекта от ЭВМ. В настоящее время разработаны и выпускаются промышленностью специальные исполнительные устройства. Так, например, наилучшие образцы шаговых электродвигателей имеют погрешность установки ротора 3% от величины шага, величину шага от 0,9 до 180 °, частоту перемещения около 30 000 шаг/с, время установления ротора 3—4 мс [300]. В работе [301] описан цифровой регулятор, построенный на микропроцессоре и предназначенный для работы в системах управления технологическими процессами с распределенными вычислительными функциями. Преимущества и недостатки каждого из перечисленных направлений неразрывны с областью использования системы управлении. Установлено, что цифровой регулятор при периодичности опроса Т может быть представлен аналоговым с последовательно подсоединенным звеном «чистого» запаздывания τ(τ= 772) [302].
Кроме того, в некоторых случаях данные направления используются совместно на одном объекте: часть функций осуществляется через аналоговые системы регулирования, часть — с помощью непосредственного цифрового регулирования (например, АСР 2-го энергоблока ТЭС «Такэхара» в Японии и др.). Применительно к АСР мощности энергоблоков 500 МВт и выше в большинстве случаев наиболее эффективным ожидается второе направление при необходимой надежности ЭВМ. Следует отметить, что при непосредственном цифровом управлении ЭВМ может выполнять по жесткой программе функции регулятора, поддерживающего в заданных пределах значения определенного числа переменных, или самонастраивающего регулятора, который оптимизирует своей работой соответствующие показатели качества технологического процесса. Применение современных методов оптимального регулирования при наличии в конторе АСР ЭВМ существенно повышает эффективность использования таких систем управления [303]. За основной показатель эффективности ЭВМ следует принимать не производительность самой вычислительной машины, а эффективность использования ее в части решаемых задач [304].
Во многих случаях объем решаемых задач, а также предъявляемые требования к надежности систем управления обусловливают установку па объекте нескольких ЭВМ. При этом необходимо увязать ЭВМ между собой и с объектом управления, а также распределить между ними решаемые задачи На основе анализа надежности централизованной и децентрализованной систем управления технологическими процессами предлагается использовать вариант с децентрализованными микропроцессорами [305]. Измерительные и исполнительные устройства соединяются с соответствующим микропроцессором, находящимся рядом. Обмен информацией между микропроцессорами и центральной ЭВМ производится по общим каналам связи. При этом целесообразно, чтобы микропроцессоры имели микропрограммное управление, а объем запоминающего устройства (ЗУ) составлял 8—16 кбайт. На нижнем уровне иерархии следует применять небольшое, но быстродействующее ЗУ. На каждом последующем уровне иерархии необходимо устанавливать устройства с меньшим быстродействием, но с большей емкостью. Особенность систем управления технологическими процессами на базе ЭВМ — высокая скорость обработки информации, существование механизма прерываний, выполнение заданий по приоритетам, мультипрограммный режим и т д. Для повышения надежности функционирования системы управления с несколькими ЭВМ в работе [306] предлагается использовать координирующий блок, устанавливающий очередность и начало запуска программ в каждой ЭВМ, а также отключающий неисправные машины. Разработан способ передачи управления работающим оборудованием резервной ЭВМ без нарушения функционирования системы, выдачи ложных команд, возникновения возмущении от переключений и т. д. [307]. Техническое состояние ЭВМ выявляется путем контроля четности, ошибок в адресации, переполнения ячеек и т. д.
На основании опыта эксплуатации АСР мощности энергоблоков 150 МВт (см. параграф 4 гл. 4) следует отметить, что имеется принципиальная возможность распространить подобную систему для энергоблоков 300 МВт (например, для котла типа ПК-41-1 — турбины типа К-300 240) с некоторыми специфическими дополнениями, обусловленными технологическими и динамическими характеристиками объекта регулирования. Работы ВНИИЭ также подтверждают возможность использования для энергоблоков с прямоточными котлами АСР мощности, разработанной для энергоблоков с барабанными котлами. Наличие у котла двух независимых корпусов, увеличение числа ограничивающих сигналов, существенная нелинейность динамических характеристик, повышение требований к точности отработки задания по мощности и качеству переходных процессов в АСР обусловливают иметь при реализации АСР мощности на энергоблоке 300 МВт две подсистемы регулирования, охватывающие каждый корпус в отдельности, блок ограничений с расширенными возможностями, а также коррекции структурных схем и параметров настройки отдельных регуляторов в зависимости от нагрузки, возмущений и т. д. Несмотря на ряд достоинств (простота, низкая стоимость, хорошая совместимость с оборудованием), применение аналоговых АСР затруднено в эксплуатации. Это связано прежде всего с низкой точностью регулирования, невысокой надежностью, нестабильностью параметров во времени, что требует от обслуживающего персонала периодических проверок, и корректировок устройств системы.
Попытка корректировать параметры настройки АСР с учетом фактора времени приводит к значительному усложнению системы и как следствие этого к потере надежности. До настоящего времени цифровые системы регулирования, обладая рядом существенных преимуществ по сравнению с аналоговыми системами, были не в состоянии конкурировать из-за высокой стоимости, низкой надежности и трудностей стыковки с оборудованием. Быстрое развитие микросхемной интегральной техники (серия К 120, К 155 и др.) позволяет цифровым АСР реализовать свои преимущества перед аналоговыми системами. Они не вносят собственной погрешности, обладают высокой стабильностью параметров настройки, без особых сложностей могут практически осуществить любой закон регулирования. Например, ПИДД-закон регулирования реализуется следующим алгоритмом на ЭВМ:
где ∆G — приращение выходной координаты регулятора; еп, en-1, еn-2> еn_3 — ошибки регулирования соответственно в n, n—1, n—2, и п—3 циклах опроса; kи, kп, kд1, kд2— соответственно весовые коэффициенты интегральной, пропорциональной, первой и второй дифференциальных составляющих ПИДД-закона регулирования.
Подтверждая рациональность использования алгоритмов, реализующих в цифровом виде пропорционально-интегрально-дифференциальный закон регулирования, следует отметить целесообразность разработки новых, полнее использующих возможности ЭВМ цифровых алгоритмов управления. Практически установлено, что для эффективного цифрового управления период квантования должен быть не менее чем в 8 раз меньше периода собственных колебаний системы регулирования.
Возможность блочной компоновки, разработки развитых индикационных устройств, невысокая стоимость серийных интегральных микросхем позволяют создавать приемлемые для практического использования цифровые АСР мощности энергоблоков, удобно согласующиеся с широко внедряемыми автоматизированными системами управления тепловыми электростанциями на основе станционных ЭВМ Помимо значительного увеличения числа и типов ЭВМ, интенсивно разрабатываются высокоточные первичные приборы на элементах цифровой техники:
датчик температуры на интегральных схемах, ваттметр на основе схемы интегрального множительного устройства [308] и др. Однако, учитывая малость опыта эксплуатации подобных систем, на первом этапе внедрения АСР мощности крупных энергоблоков, по-видимому, целесообразно оставить основные контуры регулирования первичных параметров аналого-импульсными, а надстройку, управляющую работой данных контуров, выполнять в виде минипроцессора. Такой подход позволит с наименьшими затратами средств и времени осуществить цифровое управление мощностью энергоблока и накопить соответствующий опыт эксплуатации.