ОБЩАЯ СТРУКТУРНАЯ СХЕМА КОМБИНИРОВАННОЙ АСР МОЩНОСТИ
Основные требования, которые предъявляются к АСР мощное 1 и энергоблоков, можно разделить на три группы: системные, блочные и требования обслуживания и ремонта.
Системные требования — это требования к АСР мощности со стороны энергосистемы, которые заключаются в том, чтобы АСР своими действиями способствовала повышению устойчивости энергосистемы в нормальных и аварийных ситуациях.
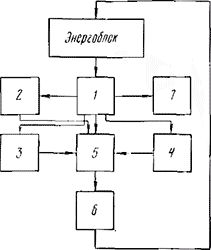
Рис. 14
Блочные требования — требования к АСР мощности со стороны энергоблока, заключающиеся в том, чтобы АСР в процессе своей работы во всех режимах поддерживала параметры, связанные с регулированием мощности, в заданных пределах. Это обеспечиваем повышение срока службы основного оборудования и эффективность его использования.
В отдельных случаях эксплуатации системные требования могут противоречить блочным. Тогда необходимо отдавать приоритет системным требованиям при обеспечении соответствующей степени надежности работы оборудования. Если в возникшей ситуации требуемая надежность работы не может быть обеспечена, то следует учитывать только блочные требования при отработке максимально близкого к установленному заданию значения мощности.
Требования обслуживания и ремонта — это требования к АСР мощности обслуживающего персонала. Они заключаются в том, чтобы АСР была удобна в эксплуатации и проста в ремонте.
Перечисленные требования определяют такие общие показатели работы АСР мощности, как экономическая эффективность, надежность, всережимность и др.
Для выполнения указанных требований АСР мощности энергоблока должна иметь (рис. 14) информационную 1, программную 2, логическую 3, счетно-решающую 4, регулирующую 5, исполнительную 6 и сигнализирующую 7 части. Структура АСР мощности (количество частей и связи между ними) в каждом конкретном случае определяется конструктивными особенностями и динамическими свойствами энергоблока (см. гл. 2), а также принятыми критериями оптимизации работы системы (см. параграф 1 гл. 3).
Основными устройствами программной части 2 являются устройства задания скачка и скорости изменения нагрузки, управления количеством форсунок-горелок, автоматической разгрузки блока, изменения заданного значения давления пара перед турбиной и др.
К устройствам логической части 3 можно отнести устройства выбора структурной схемы АСР, изменения законов регулирования отдельных регуляторов системы, выбора параметров статической и динамической настройки регуляторов, задания отклонений контролируемых параметров, выявления отказов в работе элементов АСР и др
Устройствами счетно-решающей части 4 служат устройства опенки качества работы системы в целом и отдельных ее регуляторов.
Приведенная классификация функциональных устройств АСР мощности относительно условная, так как отдельные устройства могут выполнять программные и логические, логические и счетно-решающие операции и т. д.
При испытаниях энергоблоков сверхкритических параметров оказалось, что быстрые и глубокие изменения нагрузки приводили к недопустимым отклонениям параметров технологического режима, появляющимся при значительных возмущениях со стороны регулирующих клапанов турбины. Из этого следует, что регулирующее воздействие, представляющее нагрузку котла (расходы питательной воды, топлива и воздуха), необходимо согласовывать с перемещением регулирующих клапанов турбины. С другой стороны, как отмечалось в параграфе 1 гл. 1, привлечение энергоблоков к регулированию графиков нагрузки поставило задачу создания высокоманевренных АСР мощности, наиболее полно использующих аккумулирующую способность котла, так как схемы «через турбину» и «через котел» отличались или некоторой нестабильностью, или не обеспечивали высокой приемистости. В связи с этим появились комбинированные АСР мощности, которые при разных структурных схемах имеют один общий признак, заключающийся в том, что на регулятор турбины подаются одновременно сигналы по отклонениям мощности и давления пара от заданных значений [70, 219—223]. Как правило, работоспособность комбинированных АСР мощности проверяется при изменениях нагрузки со скоростью не менее 10% в минуту.
В указанных выше работах приведены результаты испытании комбинированных АСР мощности, установленных на энергоблоках 350—500 МВт, при изменениях нагрузки со скоростью 60—110 МВт/мин. При этом параметры поддерживались удовлетворительно. Кроме того, отмечается, что комбинированная АСР мощности при изменениях нагрузки в энергосистеме обеспечивает более высокую маневренность и стабильное поддержание параметров в переходных режимах по сравнению с системами, построенными на основе группового принципа. Задачей работы, защищенной патентом [224], являлось построение АСР мощности, позволяющей отрабатывать быстрые изменения нагрузки при малой аккумулирующей способности котла. Решение поставленной задачи осуществляется путем поддержания постоянного давления на входе в пароперегреватель и в пределах зоны испарения с помощью дополнительного клапана-регулятора. В работе [2251 рассмотрено выполнение требований по маневренности к прямоточному котлу, которое заключается в поддержании соотношения вода—топливо, конструктивных мероприятиях по установлению желаемых статических характеристик пароперегревателя, а также воздействии на массовое заполнение котла. Чем больше воздействие регулятора давления на расход питательной воды, тем меньше отклонения давления и больше предъявляется требований к регулятору температуры острого пара. Поэтому в зависимости от инерционности топки и ограничении по впрыскам должна быть скоординирована работа регуляторов температуры и давления пара, а также не следует отказываться от введения на регулятор мощности сигнала, пропорционального отклонению давления. На основе анализа динамических показателей использования различных сигналов, подаваемых на котел, можно отдать предпочтение сигналу по отклонению мощности ввиду его безынерционности и отсутствия влияния на процессы регулирования котла при внутренних возмущениях. Целесообразнее применять исчезающие форсирующие связи, так как они улучшают процесс регулирования энергоблока и способствуют повышению его приемистости ([226]. Форсирующий импульс на котел по расходу пара равноценен импульсу от системы регулирования турбины. Следует также отметить, что существуют и другие выводы о роли форсирующих воздействий на котел энергоблока, участвующего в регулировании частоты и мощности. Так, в работе [227] утверждается, что поддержание давления мара перед турбиной с помощью ПИ-регулятора и опережающих сигналов по мощности или положению регулирующих клапанов равноценно использованию ПИД-регулятора без применения дополнительных сигналов. Из-за необходимости ограничивать перерегулирование по расходу топлива (как показывают исследования, перерегулирование пламени в топке может составить максимум 50%) опережающие сигналы на котел не дают существенного эффекта. При этом вид дополнительных сигналов практически безразличен [228]. В отдельных случаях по условиям поддержания оптимального режима горения (малые избытки воздуха) отказываются от введения опережающих сигналов на котел при изменении частоты. Тогда только за счет аккумулирующей способности котла допустимы кратковременные и незначительные изменения мощности. При этом предполагается, что пиковые электростанции успеют удержать частоту. Сигнал по частоте, обеспечивающий опережение изменения задания по мощности, является эффективным, если он достоверен и отсутствуют ограничения по скорости изменения нагрузки или отклонению давления пара перед турбиной [220]. Данный сигнал должен использоваться с зоной нечувствительности 0.03—0,05 Гц, позволяющей избавиться от помех. Комбинированная АСР мощности должна обеспечивать отработку плавных и небольших изменений нагрузки «через котел», а резкие изменения частоты, превышающие зону нечувствительности, компенсировать изменением мощности «через турбину» как имеющим более высокую приемистость.
В связи с этим были разработаны рекомендации по практическому внедрению проекта Энергосетьпроекта «Автоматическое регулирование частоты и активной мощности Литовской ГРЭС». В частности, была выявлена необходимость исследований и разработок по АСР мощности энергоблоков с барабанными и прямоточными котлами, учитывающих реальное состояние основного оборудования и действующие на станции устройства автоматики Поэтому были предложены, исследованы и разработаны АСР мощности энергоблоков. В основу построения систем положена схема регулирования мощности по методу прямого энергетического баланса [221, 222]:
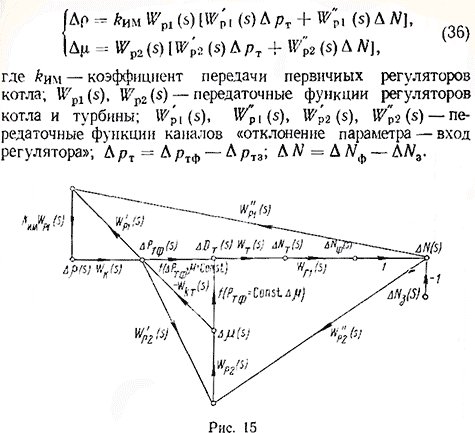
На рис. 15 представлен сигнальный граф общей структурной схемы комбинированной АОР мощности энергоблока (∆ртз=0), описываемой системами уравнений (10) и (36). Анализируя возможные частные структурные схемы общей системы регулирования мощности, следует отметить, что к схемам, обладающим повышенными маневренными свойствами, относятся такие, у которых на котел подаются сигналы ∆ρΊ и ∆N, а на турбину — ∆N (∆N), (∆рт, ∆N) — (∆N) ]; к схемам, обеспечивающим наилучшим образом базовый режим работы, относятся такие, у которых па котел подаются сигналы ∆рт и AN, а на турбину — ∆ρт[(∆Ν) — (Δμт), (∆рт, ∆N) — (∆рт); к схемам, обладающим свойствами схем, перечисленных выше, относятся такие, у которых на котел и турбину подаются сигналы ∆рт и ΔN[(Δμτ) — (∆ρт, ∆N), (∆N) — (∆рt, ∆N)].
Из исследованных вариантов структурной схемы АСР мощности наилучшим решением по повышению приемистости является вариант с регулятором мощности на турбине (при скачкообразном изменении задания по нагрузке регулятор перемещает регулирующие клапаны с перерегулированием примерно 70%) [229]. Если необходимо поддерживать давление пара перед турбиной с высокой точностью, то следует использовать вариант с регулятором «до себя». В работе [230] приведены результаты моделирования АСР мощности энергоблока 150 МВт с котлом типа ПК-38, у которой идеальный регулятор мощности управляет нагрузкой котла, а на турбине имеется электронный регулятор «до себя». С целью использования аккумулирующей емкости котла с изменением нагрузки на регуляторе «до себя» можно по определенному закону корректировать уставку. При разработке АСР мощности энергоблоков Литовской ГРЭС предусмотрены следующие режимы работы системы: «совместно» — импульсы по отклонению мощности и давления пара перед турбиной поступают одновременно на регуляторы котла и турбины; «после себя» — импульс по отклонению давления пара перед турбиной поступает на регулятор котла, импульс по отклонению мощности отключен; «до себя» — импульс по отклонению давления пара перед турбиной поступает на регулятор турбины, импульс по отклонению мощности отключен.
Режимы работы «после себя» и «до себя» являются «стерегущими» режимами па случай возникновения аварийных ситуаций в энергосистеме или на энергоблоке. Разработан ряд специальных устройств, предназначенных для снижения мощности энергоблока по сигналам, требующим разгрузки. К ним относятся устройство АОМ-ВТИ [231], электронное устройство, воздействующее на регулирующие клапаны при возникновении ограничении по основному оборудованию энергоблока, и др. При энергосистемных авариях важное значение имеет сохранение энергоблоками собственных нужд. Результаты внедрения систем аварийной разгрузки на энергоблоках 160 и 300 МВт приведены в работах [233, 234]. Интересны типовые решения по регулированию мощности энергоблока, изложенные в работе (235]. АСР мощности функционирует при пуске, нормальной эксплуатации (при постоянном и скользящем давлении пара с запасом по аккумулирующей емкости и без него), а также при аварийных изменениях нагрузки.
Современные требования, предъявляемые к AGP мощности энергоблоков, включают требования, по которым система регулирования должна работать со скользящими параметрами при минимальных нагрузках. При этом могут рассматриваться два типа систем регулирования, с постоянным (полностью открыты) и непостоянным положением регулирующих клапанов турбины. Оценивая влияние параметров настройки АСР мощности на приемистость энергоблока, в работе установлено, что такая зависимость существует и более значительно проявляется при эксплуатации со скользящими параметрами. Исследования, проведенные на математической модели энергоблока 1200 МВт, показали, что эффективность применения разности сигналов но электрической мощности генератора и давлению пара в промперегреве для повышения приемистости при скользящем давлении меньше, чем при постоянном давлении [237]. Скорость нагружения энергоблока 200 МВт с барабанным котлом при скользящем давлении почти вдвое меньше по сравнению с постоянным давлением для одной и той же скорости увеличения расхода топлива на котел [238]. В работе [239] на основании сравнения различных способов повышения приемистости энергоблока с промперегревом, работающего со скользящим давлением, путем дополнительной подачи пара в турбину рекомендуется использовать вариант, в котором дополнительный расход пара подводится в промежуточную ступень ЦВД через байпасный клапан. Данный вариант характеризуется приемлемыми динамическими свойствами и умеренным дополнительным расходом пара на перегрузку. Для улучшения динамических свойств энергоблоков с пылеугольными прямоточными котлами можно включить в тепловую схему турбоустановки накопительный бак конденсата, который позволяет увеличивать пли уменьшать расход конденсата через подогреватели низкого и среднего давления, что приводит к изменению вырабатываемой мощности [240]. Такой способ формирования мощности позволил на энергоблоках 107 и 176 МВт электростанций «Gersteinwerk» и «Westfalen» уменьшить запаздывание с 60 до 5 с, а также поднять скорость изменения мощности с 7,5 до 15 МВт/мин. Для улучшения экономичности работы при регулировании мощности энергоблока со снижением давления может быть повышено номинальное значение температуры пара. Существуют способы автоматического регулирования мощности энергоблоков со скользящим давлением пара, в которых по динамическому сигналу об изменении нагрузки, сформированному путем сравнения положения клапанов части высокого давления турбины и заданного статического положения этих клапанов, уменьшается отбор пара на регенерацию [241].

Рис. 16.
Данные способы имеют ряд недостатков: ухудшение экономичности работы оборудования с уменьшением пара на регенерацию; неполно используется аккумулирующая способность котла; ограничены по величине возможности быстрых изменении нагрузки энергоблока.
Рассмотрим способ, который устраняет указанные недостатки (рис. 16). Задание энергоблоку по мощности N, одновременно поступает на котел 1 и турбину 2, причем для котла производится экстраполяция данного сигнала на время τ в устройстве экстраполяции 9. Экстраполированный сигнал, состоит из приращения экстраполированного значения задания по нагрузке за время τ и значения задания по нагрузке в текущий момент. Сигналы N поступают на устройства задания скачка и скорости изменения нагрузки энергоблока 7, и 7-2 (8— общий задатчик для исполнительных устройств 7-1 и 72). Исполнительные устройства 71 и 72 пропускают сигналы в зоне скачка без изменений и вне зоны скачка со скоростями αν определяемыми положением задатчика 8, который может быть ручным или автоматическим. Затем сигнал с исполнительных устройств 7-1 и 72 поступают на регулятор котла 4 и регулятор турбины 5 энергоблока. Структура и параметры настройки первичных регуляторов котла и турбины могут корректироваться в зависимости от нагрузки генератора 3 энергоблока. На регулятор турбины в отдельных случаях дополнительно поступает сигнал от устройства 6, работающего в «стерегущем» режиме и предотвращающего отклонения давления пара перед турбиной ртф за граничные значения области допустимых отклонений в диапазоне регулирования. Последняя предусматривает возможность работы энергоблока в регулирующем режиме со скользящим давлением.
Особенность рассмотренного способа заключается в экстраполяции значения задания ни мощности энергоблоку, что позволяет своевременно подготовить котел, работающий но скользящим давлениям на выходе, к принятию нагрузки. Интервал экстраполяции является переменным и зависит от величины фактической мощности энергоблока, так как с изменением нагрузки изменяются динамические свойства объекта (постоянные времени, коэффициенты передачи), скорости набора и сброса зависят от диапазона нагрузки, в котором находится энергоблок (технологические ограничения), и с изменением нагрузки изменяются потери регулирования.
Существует значительное количество различных предсказывающих устройств [242]. На практике широко применяется устройство, формирующее упреждение в виде текущего значения первой производной. Данное устройство является простым по конструкции и имеющим во многих практических случаях достаточную точность предсказания, которая незначительно отличается от точности предсказывающих фильтров. Показано также, что интервал экстраполяции
![]()
где тмакс — максимальное значение времени упреждения τ; p — значение нормированной автокорреляционной функции в одной точке.
В связи с этим в качестве главного регулятора котла можно использовать ПИД-регулятор с соответствующей коррекцией времени предварения Тп1 в процессе эксплуатации. Тогда при скачкообразном изменении с учетом выражений (45) получаем
Δртф/ΔΝ30 можно рассматривать как удельный коэффициент снижения давления пара при работе энергоблока на скользящих параметрах. Таким образом, по сравнению с приведенными выше способами данный способ повышает приемистость работы энергоблока в регулирующем режиме со скользящим давлением пара перед турбиной и позволяет более полно использовать аккумулирующую емкость котла.
Помимо рассмотренного способа, существует ряд систем автоматического регулирования мощности, предназначенных для работы в режиме скользящих параметров.
Так, например, при определенных значениях нагрузки энергоблока регулятор мощности управляет положением регулирующих клапанов турбины, а регулятор давления пара обеспечивает поддержание постоянным заданного значения уставки [243]. В работе [244] приведена автоматическая гидродинамическая компенсация изменений степени неравномерности и уровня настройки системы регулирования скорости вращения турбины при скользящих параметрах пара. Так как при относительно небольших колебаниях нагрузки (до 5%) дроссельное регулирование по экономичности не хуже соплового, то в работе [245] предлагается быстрое изменение нагрузки отрабатывать перемещением регулирующих органов. По мере восстановления давления пара котлом регулирующие органы возвращаются в исходное положение. При этом следует отметить, что АСР воздействует на следующие регулирующие органы: при повышении нагрузки — на клапаны впрыска и байпасный клапан, при снижении нагрузки — на дроссельные клапаны ЧВД и ЧСД.
Как в режиме работы энергоблока с постоянными параметрами, так и со скользящими параметрами целесообразно, чтобы АСР мощности содержала устройство задания скачка и скорости изменения нагрузки. Исходя из требований энергосистемы, изменение задания по мощности энергоблоку во времени состоит из двух участков. При этом на первом участке скорость изменения задания существенно превышает скорость изменения на втором участке. В работе [246] описано управляющее устройство, которое определяет величину скачка и скорость изменения задания на втором участке с помощью вычислений напряжений, возникающих в наиболее нагруженных узлах энергоблока. Например, в качестве расчетной величины может быть использована производная изменения температуры на выходе предвключенного подогревателя. Данная величина определяется просто и является косвенным показателем температурных напряжений в коллекторе с максимальной температурой среды. Время полного хода интегратора может изменяться от 6 с до 4 ч. Как правило, величину скачкообразного изменения задания устанавливают на основе экспериментальных данных в зависимости от нагрузки. Нелинейное ограничение скорости изменения нагрузки ТЭС рассмотрено в работе [247]. На электростанции «HAFEN» Гамбургской энергосистемы изменение задания энергоблока на втором участке происходит с установленным градиентом до первого предела допустимого значения отклонения давления пара перед турбиной (±3 кгс/см2), затем градиент уменьшается. Если отклонение давления пара превысит второй предел допустимого значения (±5 κг с/см2), то изменение задания по мощности прекращается.

Рис. 17
При отклонении давления свыше 10 кгс/см2 вступает в действие «стерегущий» регулятор, работающий в режиме «до себя». В рекомендованных вариантах структурных схем регулирования мощности энергоблоков (см. параграф 5 гл. 3) используется устройство, структурная схема которого представлена на рис. 17,а. Преобразование первоначального задания по мощности Nз в задание для отработки энергоблоком Νз показано на рис 17, б. Если в устройстве сформировать обратную связь так, как условно показано (см. рис. 17, а), то получим несколько иной процесс изменения N), представленный на рис. 17, в. По такому принципу создано устройство задания скачка и скорости изменения нагрузки энергоблока 150 МВт (см. параграф 4 гл. 4), а также построена часть алгоритма работы минипроцессора АСР мощности энергоблока 300 МВт (см. параграф 2 гл. 5).