ГЛАВА ТРЕТЬЯ
ВЫСОКОЧАСТОТНЫЕ АСИНХРОННЫЕ ДВИГАТЕЛИ С РОТОРАМИ РАЗЛИЧНОЙ КОНСТРУКЦИИ
3-1. ОСОБЕННОСТИ КОНСТРУКЦИИ И СПЕЦИФИКА РАБОТЫ ВЫСОКОЧАСТОТНЫХ АСИНХРОННЫХ ДВИГАТЕЛЕЙ.

а), б), в).
Рис. 3-1. Схематическое изображение высокочастотных двигателей с роторами различной конструкции.
Высокочастотные асинхронные машины весьма разнообразны по конструкции. Однако они могут быть сведены к трем основным конструктивным схемам, отличающимся конструкцией роторов (рис. 3-1): а — с обмоткой в закрытых или полузакрытых пазах шихтованного пакета ротора; б — с массивным ферромагнитным (стальным) ротором; в — с зубчатым ротором без обмоток, пакет которого набран из изолированных листов тонколистовой электротехнической стали. Двигатели индукторного типа выполняют трехфазными и однофазными (рис. 3-2).
В индукторных электрических машинах рациональное использование площади паза статора и экономия обмоточных материалов является актуальной задачей.

Рис. 3-2. Схематическое изображение индукторных двигателей.
а — с раздельными обмотками; б — с совмещенными обмотками; в — однофазный конденсаторный; а —однофазный с короткозамкнутым витком.

Рис. 3-3. Электрошпиндель, частота вращения (120—144)-10+3 об/мин, мощность 100—250 Вт.
а — общий вид; б — вид в разрезе.
В индукторных преобразователях частоты и индукторных двигателях с несколькими первичными и вторичными отдельными обмотками требуется значительное увеличение площади паза для их размещения. Поэтому целесообразно применение совмещенных, электрически связанных обмоток (рис. 3-2,б), в проводниках которых протекает результирующий ток (Л. 38]. В этом случае достигается уменьшение диаметра проводников обмотки и площади паза. При совмещении обмоток выбирается такое число зубцов ротора и соответствующее укорочение шага обмотки, при которых в ней одновременно индуктируются э. д. с. основной гармоники и зубцовой рабочей гармоники поля, обусловленной зубчатостью ротора.

Двигатель с частотой вращения 48·10+3 об/мин. мощность 1—2 кВт.
Согласно ГОСТ 6697-67 установки переменного тока, предназначенные для работы в диапазоне частот до 10·103 Гц, должны изготовляться на следующие номинальные частоты: 400, 500, 600, 800, 1000, 1 200, 1600, 2400, 4800, 8000, 9600 Гц.
Частота вращения высокочастотного электродвигателя должна быть согласована по частоте тока с приведенной шкалой частот.
Электродвигатель, на выступающем конце вала которого закреплен шлифовальный круг, называют электрошпинделем. Его назначение — чистовое шлифование деталей. При выборе скорости вращения электрошпинделя исходят из того, что чистовое шлифование наилучшим образом осуществляется при линейной скорости шлифовального круга 25—50 м/с. Следовательно, чем меньше диаметр обрабатываемого кольца подшипника, тем больше должна быть скорость вращения электрошпинделя.
Таблица 3-1

При участии автора во Всесоюзном научно-исследовательском институте подшипниковой промышленности (ВНИИПП) был спроектирован ряд электрошпинделей, конструкции которых показаны на рис. 3-3, 3-4. Их основные данные приведены в табл. 3-1. Электрошпиндель с частотой вращения 120·103 об/мин имеет закрытую конструкцию, водяное охлаждение, выполнен на шариковых опорах.
Для уменьшения потерь энергии от полей рассеяния лобовых частей крышки и подшипниковые щиты целесообразно делать из немагнитной стали. Для отвода тепла в корпусе двигателя сделан кольцевой канал (рис. 3-4), в котором циркулирует вода, поступающая из водопроводной сети через резиновый шланг и штуцер. Смазка подшипников осуществляется масляным туманом, который подводится через специальные каналы к переднему и заднему подшипникам.
Сверхвысокоскоростные асинхронные электрошпиндели изготовляют итальянская фирма Gamfior, американская фирма Brayant и др.
С целью уменьшения окружных скоростей шарикоподшипников во ВНИИПП был создан и испытан электродвигатель на сателлитовых шариковых подшипниках (рис. 3-5) с частотой вращения до 200·103 об/мин. Основные размеры этого двигателя: диаметр ротора 24,5 мм; внутренний диаметр расточки статора 25,6 мм; активная длина пакета статора 28 мм; диаметр вала ротора под подшипниками 14 мм. Вал ротора опирается на внешние кольца трех сателлитовых шарикоподшипников с коэффициентом редукции по скорости для шарикоподшипников — около трех. При частоте 3,5 кГц синхронная частота вращения поля двигателя 210·103 об/мин. При частоте вращения ротора 200·103 об/мин линейная скорость на периферии ротора 270 м/с. Пусковые характеристики двигателя приведены в гл. 6, рис. 6-6—6-9.
Наряду с массивным ферромагнитным ротором в настоящее время применяют пакет ротора из сплава меди и стали, который имеет достаточную магнитную проводимость для рабочего поля и удовлетворительную электрическую проводимость для тока ротора, причем указанный сплав должен иметь достаточную механическую прочность по пределу текучести.

Рис. 3-5. Двигатель с сателлитным расположением шарикоподшипников, частота вращения 200-103 об/мин.
Применение высокочастотных машин экономически весьма выгодно, поскольку их основные размеры обратно пропорциональны частоте вращения поля. При этом частота вращения ротора может быть значительно меньше частоты вращения поля n1, например в двигателях индукторного типа.
Пакет ротора должен быть прежде всего рассчитан по механическим условиям, исходя из запаса прочности по пределу текучести материала. В первые годы создания сверхвысокоскоростных машин предпочитали выбирать массивный стальной ротор. В последующем выяснилась возможность применения ротора с короткозамкнутой обмоткой в шихтованном пакете. С повышением содержания кремния увеличивается предел текучести листовой электротехнической стали, поэтому для пакета ротора следует выбирать сталь марок Э31, Э41. Толщина листа для пакета ротора по причинам механической прочности не должна быть слишком малой; ее принимают равной 0,5 или 0,35 мм.
Материал для обмотки ротора следует выбирать со сравнительно большим пределом текучести и. малым удельным электрическим сопротивлением, например магниевую или кадмиевую бронзу. Однако более доступными материалами являются латунь, медь, сплавы алюминия. На современных электромашиностроительных заводах изготовление роторов с алюминиевой обмоткой хорошо освоено даже при сравнительно малых пазах и осуществляется на высокопроизводительной машине, что особенно важно при серийном производстве.
Изготовление ротора с медными и латунными стержнями связано с ручным трудом и является трудоемким процессом. Такие роторы в процессе работы склонны к разбалансировке вследствие того, что стержни перемещаются в пазах ротора.
В сверхвысокоскоростных асинхронных двигателях при большой частоте тока сравнительно велики индуктивные сопротивления рассеяния обмоток, поэтому с целью улучшения пусковых характеристик приходится выбирать материал обмотки ротора с большим удельным электрическим сопротивлением. В этом случае алюминий является более приемлемым, чем медь, поскольку он имеет большое удельное электрическое сопротивление.
Механическая прочность обмотки ротора является очень важным показателем двигателя с высокой частотой вращения и тяжелым пуском. Если принять при расчете допустимое напряжение на растяжение для меди 3 000 Н/см2, а для алюминия — 1000 Н/см2, то напряжение от центробежных сил в алюминиевой клетке получается на 30% ниже, чем в медной.
Поскольку электрошпиндели предназначены для шлифования поверхностей с высоким классом чистоты (8—12 классы), они должны иметь достаточную жесткость. Желательно иметь первую критическую скорость выше номинальной, что при весьма больших скоростях возможно только при сравнительно коротком роторе и достаточно большом его диаметре. В сверхвысокоскоростном двигателе целесообразно определять диаметр ротора, исходя из допустимого коэффициента запаса прочности материала ротора по пределу текучести.
Растягивающее напряжение σt в материале ротора, возникающее от действия центробежных сил, обусловленных собственной массой, не должно быть больше предела текучести σs материала. В противном случае произойдет «разбухание» пакета ротора.
Работоспособность сверхвысокоскоростного двигателя зависит от того, насколько правильно спроектирована его электрическая часть, какова прочность ротора, насколько эффективна система охлаждения двигателя и правильно ли выбраны опоры. Срок службы шариковых опор при больших окружных скоростях шарикоподшипников даже при смазке масляным туманом сравнительно невелик.
Больший ресурс времени работы оказывается у сверхвысокоскоростных машин на газовых опорах. Подшипники с газовой смазкой в СССР теоретически разработаны и внедряются при участии проф. С. А. Шейнберга и его учеников. Конструкции таких опор им описаны в [Л. 87]. В проблемной лаборатории МЭИ был спроектирован двигатель на длинных газовых подшипниках мощностью до 4 кВт с частотой вращения 48· 103об/мин. Он предназначен для турбокомпрессора. Такая конструкция позволяет обработать подшипники за один установ. Ротор с бортиком диаметром 20 мм вставляется справа и закрепляется подпятником. Наличие бортика позволяет фиксировать ротор с помощью подпятника в аксиальном направлении. При сборке и разборке двигателя не требуется снятия подшипников. Так как двигатель предназначен для турбокомпрессора, то на роторе имеются газовые турбины (газовые колеса). При данной конструкции они могут быть размещены или на обоих концах вала ротора, или с одной стороны. При расположении газовой турбины с одной стороны ее целесообразно разместить с той же стороны, где имеется бортик, так как в этом случае при сборке и разборке не потребуется снятия газовой турбины и не будет нарушена выполненная балансировка ротора вместе с газовой турбиной. Для охлаждения двигателя можно использовать газ, но более эффективно охлаждение водой. Поэтому в корпусе двигателя имеется канал для воды, создающий водяную рубашку. Двигатель спроектирован с трехфазной первичной обмоткой на напряжение 380 В с частотой 800 Гц. Вторичная роторная обмотка — короткозамкнутая. Данные таких двигателей при величине воздушного зазора 0,2 мм и закрытых пазах на роторе приведены в табл. 3-2 и 3-3.
Таблица 3-2

При работе двигателя на вентиляторную нагрузку его пусковой момент оказывается вполне достаточным, а перегрузочная способность по моменту около двукратной.
Табл и ц а 3-3

Материал подшипников — графит, пропитанный баббитом. Подпятник изготовлен из графита без пропитки. По окружности подшипника имеются два ряда отверстий диаметром 0,3—0,4 мм. Зазор между валом ротора и подшипником 10—30 мкм. Перед пуском двигателя сухой очищенный воздух подается в подшипники и проходит через отверстия в зазор между валом и подшипником, в результате чего создается несущая воздушная подушка. В момент пуска такие подшипники работают как аэростатические, затем по мере увеличения скорости и возникновения «воздушного клина» они начинают работать как аэродинамические. Однако при весьма больших частотах вращения длинные газовые опоры не годятся, так как в этом случае возникает полускоростной вихрь, шип (цапф) ротора задевает подшипник и разрушает его поверхность, двигатель выходит из строя. Поэтому при создании электромашин с частотой вращения (200—300)-103 об/мин и более следует применять короткие газовые опоры.

Рис. 3-6. Электрошпиндель на коротких воздушных опорах, частота вращения 300-103 об/мин, продольный разрез.

Рис 3-7. Поперечный разрез ротора.
1 — цилиндрический бандаж из немагнитной стали; 2 — стержни обмотки; 3 — ферромагнитный
Исследования таких коротких подшипников были проведены в СССР Λ. Ш. Кабулашвили и С. А. Шейнбергом [Л. 87]. При отношении длины подшипника к диаметру шипа в коротких опорах удается избежать полускоростного вихря и обеспечить работоспособность двигателя при указанных частотах вращения ротора.
Спроектированный в Проблемной лаборатории электромеханики МЭИ микроэлектродвигатель с частотой вращения 300·103 об/мин, на частоту f1=5 кГц, с первичной обмоткой на напряжение U1=127 В представлен на рис. 3-6, 3-7. Этот двигатель выполнен на коротких газовых опорах. Его назначение — чистовое шлифование отверстий колец диаметром около одного миллиметра. Конструкция двигателя позволяет осуществлять обработку и доводку коротких газовых подшипников за один установ. При сборке и разборке подшипники остаются в неприкосновенности. Фиксация ротора в аксиальном направлении осуществляется торцевым подпятником так же, как и в предыдущей конструкции двигателя. На валу 3 ферромагнитного ротора (рис. 3-7) профрезерованы пазы-шлицы, в которых помещены стержни 2 короткозамкнутой обмотки, закрытые цилиндрическим немагнитным бандажом 1. Преимущество данного микроэлектрошпинделя перед пневмошпинделем заключается в том, что он обеспечивает сравнительно жесткую механическую характеристику. В пневмошпинделе очень мягкая механическая характеристика, которая неприемлема по условиям чистового шлифования. Исправить ее, сделать более жесткой не представляется возможным из-за трудности создания газовой установки с обратными связями по скорости.

Рис. 3-8. Асинхронный двигатель индукторного типа без обмоток на роторе, частота 1 000 Гц, мощность 100 Вт. а — статор; б — ротор.
Для экспериментальных исследований на кафедре электрических машин МЭИ были спроектированы асинхронные двигатели индукторного типа (АИД), построенyые на московских заводах и в Проблемной лаборатории электромеханики МЭИ, где они и были исследованы. Показанный на рис. 3-8 АИД предназначался для замены высокочастотного обычного двигателя с механическим редуктором.
Отдельные данные экспериментальных образцов АИД приведены в табл. 3-4.
Впервые электродвигатели с магнитной редукцией скорости вращения ротора нашли применение в часовых механизмах и электроприборах в виде однофазного индукторного синхронного двигателя Уорена. В настоящее время во многих областях техники широко применяют синхронные двигатели с магнитной редукцией скорости.
Таблица 3-4

Теоретические и экспериментальные исследования этих двигателей широко проводятся в СССР и в других странах [Л. 55, 57, 63, 64, 69].
Индукторные синхронные двигатели выполняют с открытыми пазами на роторе и статоре, причем на статоре, кроме малых зубчиков (гребенки) на внутренней поверхности расточки статора, имеются большие полузакрытые пазы для размещения проводников первичной обмотки (рис. 3-9). Из общей классической теории электрических машин известно, что в машине переменного тока с открытыми пазами на статоре возникает наибольший электромагнитный момент от основных зубцовых гармоник магнитных полей (Л. 23, 69, 73—77] при условии, когда z1=z2±p1. В индукторном двигателе указанные зубцовые поля являются рабочими полями. При заданных синхронной частоте вращения (п2с) ротора и частоте электросети определяется число зубцов ротора: z1=60f1/п2с, где п2с=пγ. После этого находят число зубцов гребенки z1 статора по вышеприведенному уравнению. Что касается числа больших статорных пазов z0 для размещения обмотки, то они выбираются исходя из числа полюсов (2p1) первичной обмотки.
Индукторные синхронные двигатели изготовляются в СССР и за рубежом в основном двух видов: однофазный конденсаторный (рис. 3-2,в; рис. 3-9) и однофазный с короткозамкнутым витком на статоре (рис. 3-2,г). В том и другом виде двигателей массивный ротор — зубчатый. При асинхронном пуске магнитное поле индуктирует в массиве зубчатого ротора токи, в результате чего возникает электромагнитный вращающий момент и ротор достигает той скорости, при которой он втягивается в синхронизм. Характеристики этих двигателей улучшены путем возбуждения постоянным кольцевым магнитом, помещенным на роторе.
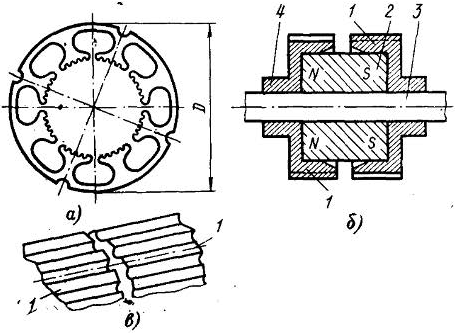
Рис. 3-9. Синхронный индукторный двигатель с двумя зубчатыми поверхностями.
а — лист стали статора; б — продольный разрез ротора; в — взаимное расположение зубцов пакетов ротора; 1 — зубцы; 2 — постоянный магнит; 3 — вал;
При двусторонней зубчатости поверхностей в индукторном двигателе можно выбрать весьма малое зубцовое деление гребенки (рис. 3-9), выполнить сравнительно большое число зубцов ротора. В результате магнитной редукции скорости удается получить весьма низкие частоты вращения ротора. Например, для получения 60 об/мин ротора при частоте сети 50 Гц необходимо выполнить ротор с числом зубцов 50, а число зубцов гребенки статора при четырехполюсной первичной обмотке можно выбрать 48 или 52.
Когда z2>z1, ротор вращается в направлении основного поля, когда z2<z1, в противоположную сторону относительно основного поля; в последнем случае возникают большие потери мощности в стали ротора от основного поля.
Основные размеры: внутренний диаметр и длина пакета определяются исходя из электромагнитных нагрузок, мощности, так же как в обычных двигателях, но с учетом специфики конструкции и условий работы данной машины. При этом чем выше частота питающей сети, тем меньше основные размеры двигателя, которые в индукторном двигателе не зависят от скорости ротора, а определяются скоростью основного поля, которое индуцирует э. д. с. в обмотке двигателя.
Изготовление микродвигателей с двусторонней зубчатостью должно быть весьма точным, так как ширина зубца гребенки около одного миллиметра (рис. 3-9). Малейшая неточность в изготовлении и сборке индукторной машины сведет на нет пульсации магнитного поля от зубцов, и машина станет неработоспособной.
Для текстильных фабрик требуется огромное количество сверхвысокоскоростных веретен — вьюрков с частотой вращения свыше полумиллиона оборотов в минуту. В существующих в данное время конструкциях такая частота вращения достигается в результате механической редукции порядка десяти. Назначение вьюрка — обеспечение ложной крутки нити. Крепление — подвеска вьюрка осуществляется с помощью постоянного магнита, при этом он вращается в результате механического соприкосновения его шеек с двумя дисками.
Система с механической редукцией скорости имеет целый ряд недостатков: ненадежность, большой износ шеек шпинделя в результате сухого трения о диски, наличие громоздких постоянных магнитов для магнитной подвески — вьюрка, большие потери мощности на трение. Эти недостатки в значительной мере могут быть устранены в случае внедрения малогабаритного сверхвысокоскоростного электродвигателя. В направлении создания таких электродвигателей для текстильных машин ведутся работы в ряде организаций. Например, в Московском текстильном институте создан миниатюрный электровьюрковый двигатель на газовых подшипниках с частотой вращения до (200—300)·103 об/мин, потребляющий мощность около 5—10 Вт.
Выше были рассмотрены двигатели с цилиндрическим ротором. Наряду с ними в настоящее время применяют и торцевые электромашины. Торцевой сверхвысокоскоростной электродвигатель с дисковым безвальным ротором 2 на газовом подпятнике 4 показан на рис. 3-10. Он предназначен для крутильной головки текстильной машины. В верхней части безвального ротора имеется чашка 5 для материала нити. Магнитная стабилизация вращающегося ротора в радиальном направлении осуществляется основным магнитным полем машины с помощью дисковых выступов и кольцевых канавок, сделанных на активных поверхностях статора 1 и ротора 2. Такая магнитная стабилизация ротора имеет целый ряд недостатков и в первую очередь то, что кольцевые канавки на поверхности пакета статора уменьшают магнитную проводимость в зазоре и полезную поверхность пакета для рабочего магнитного потока машины.

Рис. 3-10. Торцевой асинхронный двигатель с дисковым ротором.
При отключении обмотки 3 статора от электросети ротор оказывается в состоянии неустойчивого равновесия, так как в этом случае исчезают магнитные силы, которые удерживали его в радиальном направлении. Ротор приобретает хаотическое движение и может произойти поломка двигателя. В конструкции такого двигателя следует предусмотреть наряду с направляющими опорами 6, 7 постоянный кольцевой магнит или питание постоянным током статорной обмотки через выпрямитель от сети переменного тока, чтобы осуществить стабилизацию вращающегося ротора при выбеге, когда нет переменных токов в его обмотках. Более надежна магнитная стабилизация вращающегося ротора в радиальном направлении с помощью отдельной дисковой стабилизирующей обмотки, обтекаемой постоянным током, которая рассмотрена в § 5-4.
В электрической машине с безвальным ротором неоспоримо преимущество применения магнитного подвеса ротора, позволяющего повышать частоту вращения роторов, совмещать рабочие органы с телом ротора, осуществлять герметизацию статора от рабочей области ротора. Вместе с тем в ряде случаев эффективно использование магнитной стабилизации ротора совместно с другими видами опор, например с газовыми (см. гл. 6).