ЭЛЕКТРОПРИВОДЫ МЕХАНИЗМОВ ПОДЪЕМА ПО СИСТЕМЕ ТП-Д
Тиристорные электроприводы постоянного тока (системы ТП —Д) все чаще применяют в крановых механизмах. По своим характеристикам система ТП —Д близка к системе Г —Д, но дополнительно обладает рядом достоинств, основным из которых является отсутствие вращающегося преобразователя. По технико-экономическим показателям систему ТП —Д рационально применять при мощности выше 60 кВт. Такие мощности имеют исполнительные двигатели механизмов подъема строительных башенных кранов с грузовым моментом выше 2500 кН * м. В настоящее -время системами ТП —Д оснащены краны типов КБ-674 и КБ-675.
На рис. 5 приведена схема электропривода механизма подъема с нереверсивным тиристорным преобразователем и двигателем независимого возбуждения. Система автоматического управления приводом включает бесконтактные элементы, входящие в состав тиристорного преобразователя; релейно-контакторную часть, элементы которой обеспечивают взаимодействие тиристорного преобразователя, находящегося в цепи якоря, с реверсором. Управление электроприводом осуществляется командоконтроллером КК, имеющим по пять фиксированных рабочих положений в сторону «Подъем» и «Спуск» и одно нулевое нерабочее положение.
На первой позиции командоконтроллера включаются контакты реверсора (КВ и КН), растормаживается электромагнитный тормоз и на задающие обмотки СМУР (ОЗ СМУР) и С МУЛ (03 СМУЛ) подается напряжение. Включение задающих обмоток СМУР и СМУ Л производится с помощью промежуточных реле РП1, РП2 и РПН, РПВ. При последующих положениях командоконтроллера увеличивается напряжение на задающей обмотке СМУР, вследствие чего возрастает напряжение тиристорного преобразователя и соответственно частота вращения двигателя. Для получения повышенных скоростей подъема и спуска легких грузов и ненагруженного крюка на пятом положении командоконтроллера предусмотрено ослабление поля двигателя при полном напряжении на якоре двигателя.
Регулирование тока возбуждения в этом режиме производится с помощью возбудителя РИВ. Изменение выходного напряжения РИВ осуществляется суммирующим магнитным усилителем СМУРВ, задающая обмотка которого включается с помощью реле РП5. Обратная связь по току двигателя выполняется обмоткой обратной связи ОС СМУРВ, включаемой контактами реле РП5 и РЛ6. Ослабление поля при спуске достигается нажатием кнопки КнО и действует до нагрузки, на которой происходит переключение контакторов направления с КН на КВ, изменяющих режим работы преобразователя с выпрямительного на инверторный.
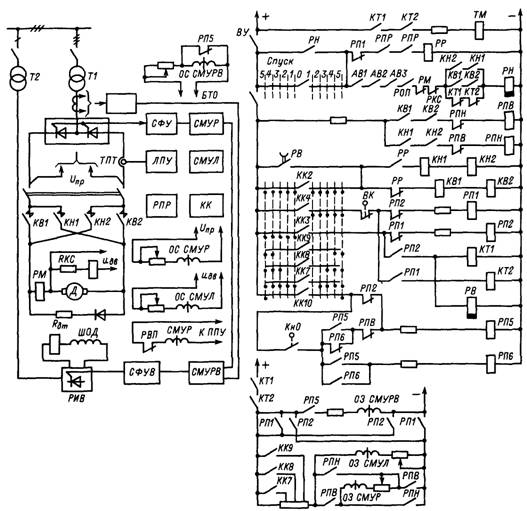
Рис. 5. Схема электропривода механизма подъема с нереверсивным тиристорным преобразователем
При установке командоконтроллера на нулевое положение задающие сигналы СМУР и СМУЛ становятся равными нулю и двигатель останавливается под действием электромагнитного тормоза ТМ и электрического торможения, осуществляемого на время действия выдержки реле РВ, через контакты которого производится подпитка катушек контакторов реверсора. Состояние контакторов реверсора при работе привода зависит от положения командоконтроллера и состояния логического переключающего устройства ЛПУ (рис. 6). Последнее воздействует на реле РПР, которое замыкающим контактом включает реле PP. В зависимости от состояния реле РР включаются контакторы КВ/, КВ2 или КНI, КН2. Логическое переключающее устройство выполнено на базе триггера. Состояние этого устройства определяется его входным сигналом Ди, поступающим от СМУЛ, и сигналом, пропорциональным выпрямленному току преобразователя, который подается с трансформатора постоянного тока ТПТ. При положительном значении Аи ЛПУ переключается в положение, соответствующее включению промежуточного реле РПР (открыты триоды Т1 и Т4). При отрицательном значении Ди реле РПР отключается (открыты триоды 12, ТЗ и закрыты 77, Т4). При этом включаются контакторы КН1 и КН2. При исчезновении Аи состояние ЛПУ не изменяется и включение контакторов и реле остается прежним. Переход от одного состояния в другое возможен только при изменении знака Аи и отсутствии тока преобразователя. Если ток не равен нулю, то изменение состояния ЛПУ невозможно. Логическое переключающее устройство позволяет обеспечить бестоковую коммутацию контактов реверсора в процессе его переключения при торможениях, пусках и реверсах. Покажем это на примере процесса торможения с подъема при переходе с более высокого уровня скорости на более низкий. В этом случае снижение сигнала и3, вызывающее процесс торможения, приводит к изменению знака Дм = и3-мдв и снижению уровня выпрямленного напряжения. В результате противо-ЭДС двигателя оказывается выше напряжения преобразователя, что приводит к интенсивному снижению тока в двигателе. В момент достижения током нулевого значения происходит переключение ЛПУ, отключение реле РПР и РР; контакторы КВ1, КВ2 отключаются и включаются контакторы КН1, КН2. Включение контакторов КН1 и КН2 приводит к смене полярности напряжения на обмотке СМУР (задающего и обратной связи по напряжению), вследствие чего преобразователь переходит в инверторный режим, а электродвигатель — в режим генераторного торможения. По мере торможения двигателя отрицательное значение Аи уменьшается по абсолютному значению, проходит через нулевое значение и вновь становится положительным. Ток двигателя падает до нуля, и ЛПУ переключается в прежнее состояние, при котором включены контакторы КВ1, КВ2. Преобразователь вновь начинает работать в выпрямительном режиме, но уже с более низким значением напряжения, что соответствует меньшей скорости двигателя.
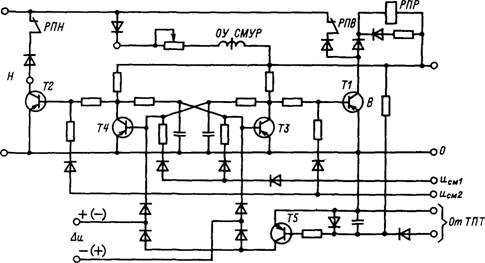
Рис 6. Схема логического переключающего устройства
В схеме электропривода предусматриваются защиты: нулевая (реле РН), максимальная (реле РМ), защита от обрыва поля (РОП), защита от токов короткого замыкания и перегрузок по току (автоматические выключатели АВ1, АВ2, АВЗ), защита от чрезмерного повышения скорости (реле РКС), конечная защита (выключатель ВК в сторону подъема).