Существующие системы управления крановыми электроприводами можно объединить в три группы: непосредственного управления исполнительными электродвигателями постоянного и переменного тока с помощью комплектных силовых коммутационных аппаратов, называемых силовыми кулачковыми контроллерами; дистанционного управления исполнительными электродвигателями постоянного и переменного тока, получающими питание от сети и содержащими комплектные устройства коммутации силовых цепей, называемые магнитными контроллерами; управления двигателями постоянного тока и асинхронными с питанием их от электромашинных или вентильных преобразователей тока, частоты, напряжения. Системы управления, применяемые в крановых электроприводах, а также основные технические показатели их работы приведены в табл. 3.
Таблица 3. Система управления крановыми электроприводами
Показатель | Асинхронный электродвигатель с фазным ротором | Асинхронный короткозамкнутый двигатель, кулачковый контроллер или магнитный пускатель | Асинхронный двухскоростной короткозамкнутый двигатель | ||
Кулачковый контроллер | Магнитный контроллер | Магнитный контроллер для двухдви- гательного привода | Кулачковый магнитный контроллер | ||
Диапазон мощностей, кВт | 2-30 | 2-100 | 20-80 | 2-15 | 2-40 |
Диапазон регулирования при номинальной нагрузке | 1: 2,5 | 1:4 | 1: 8 | 1: 1 | 1: 6 |
| 1:6 |
|
|
| |
Регулирование скорости выше номинальной | Нет | Нет | От 1,5: 1 | Нет | Нет |
|
| до 20: 1 |
|
| |
Число ступеней устойчивого регулирования скорости | » | 2 | 2/3 | » | 2 |
|
|
|
|
| |
Пусковая мощность, доли номинальной | 2,5 | 2,5 | 2,5 | 5 | 3,5 |
Произведение КПД на cosφ при | 0,6 | 0,6 | 0,6 | 0,7 | 0,8 |
Относительный расход энергии на | 1 | 1 | 0,9 | 1,3 | 1,8 |
Потери энергии в двигателе от общих потерь энергии в электроприводе, % | 15 | 15 | 15 | 100 | 100 |
Вероятность безотказной работы | 0,9 | 0,9 | 0,9 | 0,95 | 0,95 |
за 6 мес |
|
|
|
|
|
Возможность дистанционного управления | Нет | Есть | Есть | Есть | Нет |
Допустимая частота включения до | 120 | 300 | 300 | 120 | 300 |
Электрическая износостойкость, 106 | 0,3 | 0,5 | 0,5 | 0,3 | 0,3 — 1 |
Эксплуатационное обслуживание | Электромонтер средней квалификации |
| |||
Условия наладки | Наладки не требуется | ||||
Условия ремонта и обслуживания | Ремонт возможен в мастерских без специального оборудования | ||||
Продолжение табл. 3
Показатель | Асинхронный двухскоростной коротк озамкнутый двигатель | Электродвигатель постоянного тока | |||
Магнитный контроллер с нерегулируемым выпрямителем | Система | Тиристорный преобразователь постоянного тока | |||
Тиристор- | |||||
нереверсивный | реверсивный | ||||
Диапазон мощностей, кВт Диапазон регулирования при номинальной нагрузке | 20-80 1:8 | 3-100 1:6 | 20-180 1: 10 | 50-100 1: 10 | 100-200 1: 10 |
Продолжение табл. 4
Показатель | Асинхронный двухскоростной коротк озамкнутый двигатель | Электродвигатель постоянного | тока | ||
Магнитный контроллер с нерегулируемым выпрямителем | Система Г-Д | Тиристорный преобразователь постоянного тока | |||
Тиристорный преобразователь частоты ПЧН-АД | |||||
нереверсивный | реверсивный | ||||
Регулирование скорости выше номинальной | 1,8:1 | 25: 1 | 2,5:1 | 2,5: 1 | 2,5:1 |
Число ступеней устойчивого регулирования скорости | До 5 | До 4 | До 5 | До 5 | До 5 |
|
|
|
|
|
|
Пусковая мощность, доли номинальной | 3,5 | 2,2 | 1,8 | 1,8 | 1,8 |
Произведение КПД на cosφ при | 0,8 | 0,9 | 0,70 | 0,85 | 0,88 |
Относительный расход энергии на единицу полезной работы | 0,85 | 1,3 | 0,9 | 0,9 | 0,9 |
Потери энергии в двигателе от общих потерь энергии в электроприводе, % | 100 | 15 | 40 | 60 | 60 |
Вероятность безотказной работы за | 0,92 | 0,92 | 0,92 | 0,85 | 0,88 |
Возможность дистанционного управления | Есть | Есть | Есть | Есть | Есть |
Допустимая частота включения до | 600 | 600 | 600 | 600 | 600 |
Электрическая износостойкость, 106 | 1 | 1 | 2 | 10 | 10 |
Эксплуатационное обслуживание | Электромеханик | Электромонтер сред | Электромеханик высокой квалификации | ||
Условия наладки | Сложная наладка | Наладки | Наладка | Сложная | наладка |
|
| не требуется | простая |
|
|
Условия ремонта и обслуживания | Ремонт в специальных мастерских с | Ремонт возможен только в условиях мастерских со специальным технологическим оборудованием | |||
| использованием | ||||
МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ КРАНОВЫХ ЭЛЕКТРОПРИВОДОВ
Статические и динамические нагрузки крановых механизмов определяют выбор систем электроприводов и требования к ним.
При выборе системы электропривода крановых механизмов следует учитывать следующие особенности их работы: широкий диапазон изменения моментов сопротивления; необходимость реверсирования; ограничение, момента в элементах механизмов; обеспечение работы на пониженной скорости; ограничение ускорений.
Желаемые механические характеристики механизмов подъема крана приведены на рис. 4. Характеристика 1п используется для подъема грузов с пониженной скоростью и предназначена для выбора слабины канатов и точной установки груза при монтажных операциях. Характеристики 2п и 3п служат для подъема грузов с промежуточной и номинальной скоростями. Характеристика 4п требуется для подъема малых грузов с повышенной скоростью с целью повышения производительности кранов; скорость при работе на этой характеристике превышает в 2 раза номинальную.
Характеристика 1 с служит для спуска грузов с малой скоростью, что требуется для точной установки груза при его спуске. Характеристики 2с и 3с используются для спуска грузов с промежуточной и номинальной скоростями, а характеристика 4с — для спуска легких грузов с повышенной скоростью, что также повышает производительность работы кранов.
Показанные на рис. 4 вертикальные участки характеристик требуются для ограничения моментов и ускорений при пусках и торможениях механизма. По условиям эксплуатации удобно обеспечить примерно одинаковое время переходных процессов для подъема и спуска грузов. При этом стопорные моменты на характеристиках подъема и спуска должны различаться между собой, что объясняется разными моментами сопротивления при подъеме и спуске грузов (см. заштрихованные на рисунке области изменения Мс, обусловленные изменением массы груза). Из-за этого электроприводы механизмов подъема имеют несимметричные относительно начала координат характеристики, т. е. при подъеме и спуске грузов используются различные семейства механических характеристик.
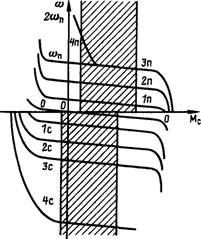
Рис. 4. Желаемые механические характеристики механизмов подъема крана