Магнитный режим ДГН при заданных параметрах обмоток определяется напряжением питания, так как от него зависит намагничивающий ток в первичной обмотке и магнитная напряженность в магнитопроводе. Если пренебречь активным сопротивлением датчика, которое составляет менее 5% от полного сопротивления, то намагничивающий ток
![]() (7.5)
(7.5)
где f- частота питающего напряжения; I - индуктивность датчика.
Изменение тока намагничивания и магнитной напряженности из-за колебаний питающею напряжения в электрической сети приводит к изменению вторичного напряжения (характеристики датчика) и появлению
погрешности в измерении нагрузки. Поэтому при питании ДГН от электрической сети напряжение должно быть обязательно стабилизировано.
Питание ДГН синусоидальным напряжением.
Создание высокостабильного источника синусоидального напряжения является сложной задачей, так как при этом необходимо обеспечить стабильность не только амплитуды и частоты, но и формы кривой напряжения, которые влияют на режим работы ДГН и его метрологические характеристики.
На рис.7.14 приведена схема питания ДГН синусоидальным напряжением, в которой применен феррорезонансный стабилизатор напряжения (ФСН) и дополнительно предусмотрено включение ДГН в режиме последовательного феррорезонанса, для чего служит конденсатор С. Учитывая неизбежный разброс характеристик датчиков при их производстве, выбор емкости конденсатора С производится для каждого ДГН в отдельности.
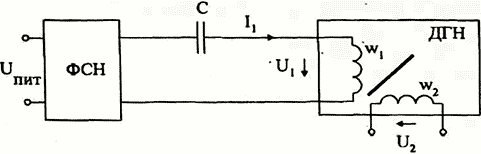
Рис.7.14. Схема питания ДГН синусоидальным напряжением
Приведенная схема включения ДГН с двойной стабилизацией режима его питания позволяет существенно уменьшить погрешности из-за колебаний напряжения. В качестве примера приведем данные о десяти ДГН, внедренных в СТГН на ВЛ 10-35 кВ. При изменении напряжения питания в пределах ± 25% Uном максимальная относительная погрешность ДГН для указанной партии датчиков находилась в пределах δ=1,2 —2,0%. Величина погрешности δ определялась, как отношение максимального отклонения вторичного напряжения датчика при заданной нагрузке и указанных выше изменениях напряжения питания к изменению вторичного напряжения при нагружении ДГН от нуля до максимальной нагрузки Рмакс.
Для сравнения максимальная относительная погрешность при питании датчиков непосредственно от ФСН (без дополнительной стабилизации режима) находилась в пределах δ=2,5-3,0% , т.е. в 2-3 раза выше, чем в схеме с двойной стабилизацией.
Применение рассмотренной схемы питания ДГН позволило выполнить СТГН с точностью измерения гололедной нагрузки до 5% от Рмакс. Например, внедренные на ВЛ 10-35 кВ СТГН обеспечивают точность измерения до 0,05 κН при Рмакс = 1-1,5 кН.
К недостаткам рассмотренной схемы питания ДГН следует отнести наличие остающейся погрешности, обусловленной:
- изменением формы (относительной величины высших гармоник) напряжения на выходе ФСН при колебаниях питающего напряжения;
- изменением частоты напряжения питания.
Для исключения высших гармоник возможно применение фильтров, однако это не исключает отрицательного влияния нестабильности частоты на погрешности датчика.
Изменение частоты питающего напряжения так же, как и колебания его амплитуды, влияет на характеристики датчика. Из (7.5) следует, что уменьшение частоты, эквивалентное некоторому повышению напряжения U приводит к увеличению тока намагничивания I и, следовательно, вторичного напряжения U2 датчика и наоборот.
Если питание ДГН осуществляется напряжением энергосистемы, то незначительные (менее 0,5 %) рабочие колебания частоты не вызывают существенных погрешностей и позволяют выполнять измерения с точностью ДО 5% ОТ Рмакс·
Питание ДГН переменным напряжением прямоугольной формы.
Применение феррорезонансных стабилизаторов принципиально не позволяет исключить погрешности ДГН, возникающие при колебаниях напряжения сети. Погрешность удалось уменьшить до величины менее 2% при Uпит. ном ± 25%. Искажение формы кривой напряжения на выходе ФСН и отсутствие стабилизации частоты неизбежно сказывается на точности измерений.
Более совершенные схемы питания ДГН, выходные параметры которых не зависят от колебаний напряжения и частоты питающей сети, могут быть выполнены с использованием преобразователей стабилизированного постоянного напряжения в переменное прямоугольной формы. Выбор такой формы напряжения обусловлен тем, что:
- питание ДГН напряжением прямоугольной формы не приводит к ухудшению метрологических характеристик датчика, в частности, к снижению магнитоупругой чувствительности;
- стабилизация постоянного напряжения с использованием современных интегральных стабилизаторов выполняется значительно проще и точнее.
Применение преобразователей постоянного напряжения в переменное позволяет, кроме того, осуществлять выбор частоты питающего напряжения с целью улучшения основных метрологических характеристик датчика: магнитоупругой чувствительности и линейности выходной характеристики.
Схема такого источника питания ДГН приведена на рис.7.15,а и включает в себя феррорезонансный стабилизатор напряжения (ФСН), выпрямитель, стабилизатор постоянного напряжения (СПН) и магнитотранзисторный преобразователь (МТП) со схемой управления (СУ). Феррорезонансный стабилизатор ФСН выполняет функции первичного стабилизатора при рабочих колебаниях напряжения сети и ограничителя напряжения на входе СПН при перенапряжениях. Это позволяет выполнить ФСН по простейшей схеме, не предъявляя к нему жестких требований по точности стабилизации.

Рис.7.15. Схема питания ДГН переменным напряжением прямоугольной формы (а) и схема магнитотранзисторного преобразователя (б)
Магнитотранзисторный преобразователь постоянного напряжения в переменное прямоугольной формы стабильной частоты и амплитуды выполнен по схеме двухтактного нерегулируемого инвертора с нулевым выводом (рис.7.15,б). Такая схема МТП наиболее проста и удобна в отношении управления, так как транзисторы включены по схеме с общим эмиттером.
При поочередном через полпериода переключении транзисторов VT1 и VT2 стабилизированное напряжение источника питания прикладывается попеременно то к одной, то к другой половине первичной обмотки w трансформатора Т, создавая в его магнитопроводе переменный магнитный поток, который наводит во вторичной обмотке W2 переменное напряжение прямоугольной формы.
Транзисторы МТП шунтированы встречно включенными диодами VD1 и VD2, благодаря чему при активно-индуктивной нагрузке, которую представляет собой ДГН, обеспечивается возврат обратных токов, протекающих в начальной части каждого полупериода за счет энергии, запасенной в индуктивности нагрузки. Переменная составляющая потребляемого тока замыкается через конденсатор С1, включенный на входе МТП.
Поперечная емкостная компенсация, выполненная с использованием конденсатора С2, включенного между коллекторами транзисторов, служит для уменьшения динамических потерь в транзисторах и внутренних перенапряжений.
Трансформатор МТП работает в линейном режиме с индукцией ниже индукции насыщения, поэтому для снижения потерь мощности в транзисторах и магнитопроводе последний желательно выполнять из материала с прямоугольной или почти прямоугольной петлей перемагничивания. Применение тороидального магнитопровода с прямоугольной формой петли перемагничивания обеспечивает более четкое переключение транзисторов и более высокую крутизну фронта прямоугольных импульсов.
Так как мощность, потребляемая датчиком, незначительна (~1ВА), то сечение магнитопровода трансформатора выбирается из условия рационального числа витков его обмоток.
Индуктивность рассеяния трансформатора вызывает искажение прямоугольной формы кривой напряжения и является причиной возникновения перенапряжений на транзисторах. Значительного уменьшения индуктивности рассеяния можно достигнуть, наматывая обе половины первичной обмотки одновременно в два провода. Кроме того, для улучшения связи между первичной и вторичной обмотками желательно разделить вторичную обмотку на две половины и между ними расположить первичную. Обе обмотки должны равномерно располагаться по всему магнитопроводу трансформатора.
Прямоугольные импульсы управления поступают на базы транзисторов от схемы управления СУ, причем при токах ДГН в пределах 40- 50мА управление транзисторами может осуществляться непосредственно от микросхем, что упрощает схему управления. Если схему управления СУ выполнить на кварцевом генераторе стабильной частоты, то полностью исключается влияние колебаний частоты сети на работу ДГН.
Применение рассмотренной схемы питания существенно улучшает метрологические характеристики ДГН, так как практически полностью исключает погрешность, обусловленную нестабильностью напряжения и частоты питающей сети. Она позволяет осуществлять питание ДГН и от автономного источника постоянного напряжения (аккумулятора), например, при создании радиотелемеханической системы измерения гололедных нагрузок.