При блочной компоновке электростанций, когда отсутствуют связи с однотипными агрегатами других блоков, взаимная зависимость различных составных частей блока усиливается. Качество выполнения основной технологической задачи — выработки заданного количества электрической энергии при требуемых напряжении и частоте—в большей мере, чем для неблочных установок, определяется всем комплексом оборудования. В этих условиях блок необходимо рассматривать как единый энергетический агрегат с общей системой регулирования. Вопросы регулирования энергоблоков детально рассмотрены в монографии [24]. Поскольку вопросы режимов работы энергоблоков и их регулирования тесно связаны между собой, автор в настоящей книге вынужден касаться некоторых вопросов регулирования, ограничиваясь лишь теми из них, которые непосредственно влияют на выбор режимов работы и технико-экономические показатели блоков.
Энергетический блок представляет собой сложный многоагрегатный объект регулирования со многими регулируемыми величинами. Среди них потребителем регламентируются лишь две: частота и напряжение, характеризующие качество отдаваемой во внешнюю сеть электрической энергии. Эти регулируемые величины будем в дальнейшем называть внешними. Внешние регулируемые величины поддерживаются соответствующими автоматическими регуляторами с точностью, предписанной потребителем. Напряжение на шинах генератора поддерживается автоматическим регулятором возбуждения (АРВ). Для улучшения качества регулирования напряжения в современные системы АРВ вводят дополнительные импульсы по скорости и ускорению ротора. Обратных импульсов от АРВ в систему регулирования тепломеханического оборудования блока обычно не вводят. Такой односторонний характер связей, а также более быстрые электромагнитные и электромеханические процессы в системе АРВ по сравнению с тепломеханическими процессами в основном оборудовании блока позволяют во многих случаях рассматривать последние изолированно от регулирования напряжения. В связи с этим в дальнейшем под системой регулирования блока, если не сделано особых оговорок, будем понимать систему регулирования его тепломеханического оборудования. При нормальных режимах энергосистем, когда поддерживается с предписанной точностью номинальная частота электрического тока, задачей регулирования блоков становится оптимальное распределение нагрузок между агрегатами. Для этого в автоматические системы регулирования (АСР) включают регуляторы мощности, приводящие фактическую мощность турбины в соответствие с заданной. При этом единственной внешней регулируемой величиной конденсационного блока является мощность турбины. Теплофикационный блок имеет две внешние регулируемые величины: мощность турбины и тепловую нагрузку, мерой которой обычно принимают температуру сетевой воды или давление отбираемого пара.
Остальные — внутренние — регулируемые величины энергоблока не регламентируются потребителем. К их числу относятся, в частности, параметры пара перед турбиной, параметры промперегрева пара, угловая скорость питательного насоса и др. Различные внутренние регулируемые величины не в одинаковой мере влияют на выполнение основной технологической задачи блока, этим определяется их разный ранг.
Один и тот же конечный результат может быть получен при различных сочетаниях внутренних регулируемых величин. Это расширяет возможности конструкторов и эксплуатационного персонала энергоблоков. Они могут применять различные программы регулирования — определенные статические закономерности изменения внутренних регулируемых величин.
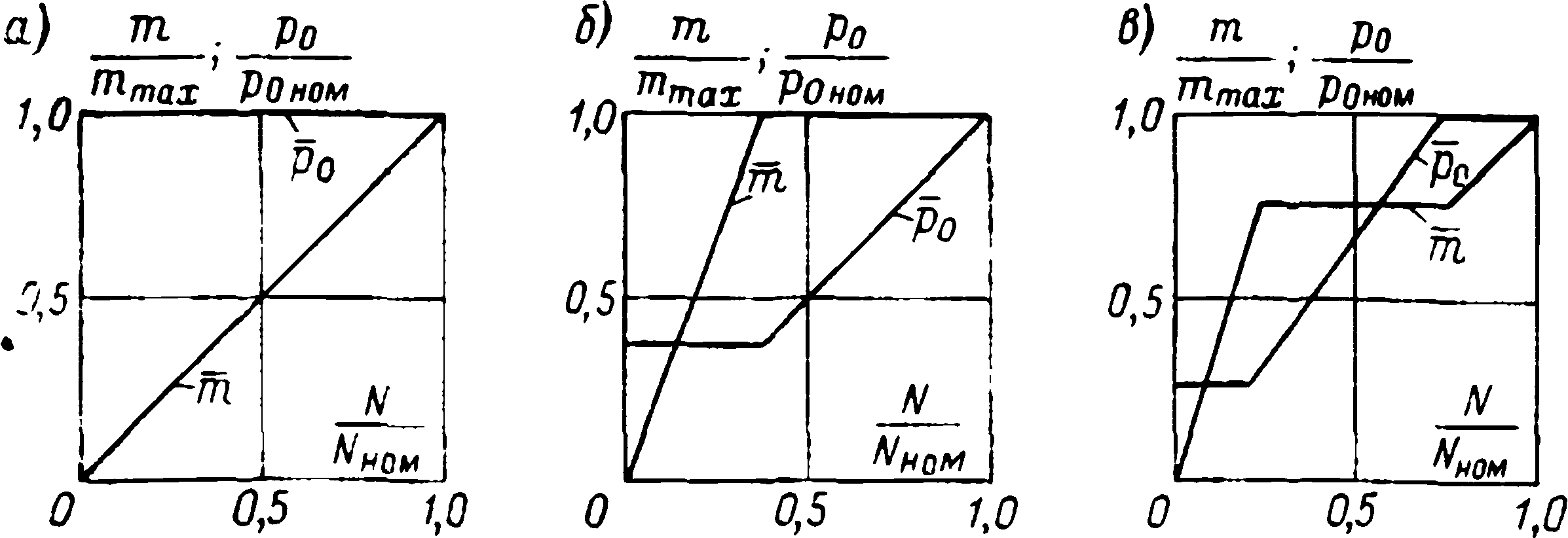
Рис. 1-5. Характеристики энергоблоков ТЭС при различных программах регулирования
Так, для энергоблоков ТЭС находят практическое применение программы регулирования с постоянным начальным давлением пара р0 и переменным положением регулирующих клапанов турбины, определяемым координатой m (рис. 1-5, а); со скользящим начальным давлением пара и неизменным равновесным положением регулирующих клапанов (рис. 1-5, б), а для турбин с сопловым парораспределением также комбинированная программа регулирования (рис. 1-5, в), при которой в области высоких нагрузок поддерживается постоянное давление пара, а в области низких — скользящее при полностью открытых клапанах, подводящих пар к двум сегментам сопел регулирующей ступени, и полностью закрытых остальных клапанах (см. гл. 3). Для энергоблоков АЭС с водо-водяными реакторами применяют программу регулирования с постоянной средней температурой Τ теплоносителя в первом контуре (рис. 1-6, а), обеспечивающую изменение мощности блока при почти неизменном положении тс управляющих стержней реактора; программу с постоянным начальным давлением пара р0 во втором контуре (рис. 1-6,б); со скользящим начальным давлением пара во втором контуре при неизменном положении т регулирующих клапанов турбины (рис. 1-6, в) или комбинированную программу (рис. 1-6, г), включающую в себя для разных диапазонов нагрузок первую и вторую программы [24]. Программы регулирования с постоянным и скользящим начальным давлением пара находят применение также для энергоблоков АЭС с канальными реакторами [49]. Для энергоблоков ТЭЦ наряду с широко используемыми программами с постоянным и скользящим начальным давлением пара, а также комбинированной программой регулирования начального давления [33] начинает применяться программа регулирования со скользящим противодавлением в конденсаторе или сетевых подогревателях [56].

Рис. 1-6. Характеристики энергоблоков АЭС с водо-водяными реакторами при различных программах регулирования
Составными частями общей программы регулирования блока являются подпрограммы регулирования его элементов, представляющие собой статические характеристики изменения внутренних регулируемых величин низших рангов в зависимости от режима блока. Одна и та же программа может быть реализована при разных, например, подпрограммах регулирования угловой скорости питательного насоса или регулирования расхода теплоносителя в первом контуре атомного энергоблока.
Программа регулирования энергоблока и совокупность подпрограмм регулирования его составных элементов определяют статическую характеристику регулирования блока. Принципиально в распоряжении конструкторов и эксплуатационного персонала имеется бесконечное число программ регулирования. Выбор оптимальной программы и входящих в нее подпрограмм регулирования элементов блоков является задачей термодинамики регулирования энергоблока. Вопросы термодинамики регулирования блоков различного типа подробно рассмотрены в последующих главах книги.
Внешний управляющий сигнал (задание на изменение мощности блока) может быть введен в различные точки его системы регулирования. Для блоков ТЭС возможно введение его только в АСР котла. В результате такого воздействия изменяется сначала режим работы котла, а затем турбины. Если управляющий сигнал введен только в АСР турбины, то сначала изменяется режим ее работы, а котел следует за турбиной. Отмеченные способы управления энергоблоком будем называть соответственно первичным управлением котлом и первичным управлением турбиной. В аналогичном смысле применительно к энергоблокам АЭС будем говорить о первичном управлении турбиной и первичном управлении реактором. Схемы, в которых управляющий сигнал одновременно поступает в АСР турбины и парогенератора (их называют координированными или интегральными), по своим свойствам занимают промежуточное положение между схемами, реализующими отмеченные выше способы управления. Принятый способ управления во многом определяет динамические характеристики энергоблока [24], но не оказывает никакого влияния на его статические характеристики. В частности, при каждом из перечисленных способов может быть реализована любая программа регулирования блока.
Принципы регулирования энергоблоков могут быть распространены также на неблочные электростанции, все парогенераторы которых связаны общим паропроводом, откуда пар поступает в отдельные турбины. Наряду с наиболее распространенным способом самостоятельного регулирования каждой из турбин такой электростанции можно организовать управление всей электростанцией или ее частью как единым энергетическим агрегатом — полиблоком (см. гл. 3 и 5), включающим в себя все парогенераторы и турбины электростанции или ее выделенной части. Ввиду этого следует признать необоснованным широко распространенное мнение, что единственно возможная программа регулирования неблочных электростанций — программа с постоянным давлением. Для полиблока могут быть применены и другие программы регулирования, в частности программа со скользящим начальным давлением пара, при которой регулирование мощности всех турбин полиблока производят не их клапанами, а изменением давления в общем паропроводе (см. гл. 3 и 5).
Для выполнения предъявляемых требований энергоблоки должны обладать надлежащими маневренными свойствами. Маневренность определяется совокупностью характеристик энергоблока, обеспечивающих эффективность его участия в регулировании мощности в энергосистемах: регулировочным
диапазоном, представляющим собой разность максимальной мощности и нагрузки технического минимума (минимальной мощности, при которой блок может работать неограниченно долгое время); временем остановки блока и пуска его из различных тепловых состояний; скоростью изменения нагрузки. С маневренностью тесно связаны такие технико-экономические характеристики блока, как затраты топлива на его пуск и остановку и тепловая экономичность при различных нагрузках в пределах регулировочного диапазона, определяющие рентабельность работы при том или ином режиме. Скорость изменения нагрузки блока характеризуется его приемистостью, количественной мерой которой в интервале времени t от момента возмущения tx до момента t2 является коэффициент приемистости.
![]() (1-3)
(1-3)
где ∆N и ∆Nзд — фактическое и заданное изменение мощности турбины.
Хотя во всех случаях желателен возможно более быстрый переход блока от одного режима к другому, тем не менее требования к приемистости при плановых и аварийных изменениях мощности принципиально различны. В первом случае, когда необходимы большие изменения нагрузки в соответствии с суточным графиком, допустимая скорость изменения мощности ограничена температурным состоянием оборудования и паропроводов. Время перехода от одного режима работы к другому при этом составляет минуты. При аварийных же ситуациях в энергосистеме [24], когда требуется ограниченное изменение мощности за очень короткое время (набор до 10% номинальной мощности за время, не большее 2 с, или кратковременная импульсная разгрузка турбоагрегатов), температурные ограничения не играют столь важной роли. Скорость изменения мощности определяется при этом главным образом динамическими характеристиками агрегатов и автоматических систем регулирования. Пути повышения аварийной приемистости блоков принципиально отличны от путей улучшения остальных маневренных характеристик, а в ряде случаев улучшение последних сопровождается существенным ухудшением аварийной приемистости.
Поэтому, хотя приемистость и является безусловно одной из составляющих маневренности, нередко маневренность и приемистость (под которой понимают аварийную приемистость) рассматривают как самостоятельные характеристики. Вопросы приемистости детально рассмотрены в работах по регулированию блоков, в частности в монографии [24]. В настоящей книге основное внимание уделяется путям улучшения маневренных характеристик энергоблоков, в первую очередь связанным с их работой при стационарных режимах в пределах регулировочного диапазона.