СПЕЦИАЛЬНЫЕ МЕТОДЫ КОМПЕНСАЦИИ РМ У АСИНХРОННЫХ ДВИГАТЕЛЕЙ И СВАРОЧНЫХ ТРАНСФОРМАТОРОВ
4. СПОСОБЫ КОМПЕНСАЦИИ РМ У АСИНХРОННЫХ ДВИГАТЕЛЕЙ
Компенсация реактивной мощности у асинхронных двигателей относится к способам естественного повышения их cos φ и является важным звеном в общем комплексе ее рациональной компенсации. К таким способам относятся замена недогруженных АД на двигатели меньшей мощности, облегчение условий их пуска, секционирование обмоток статора недогруженных АД, применение тиристорных регуляторов в цепи статора недогруженных АД.
Замена недогруженных АД электродвигателями меньшей мощности является одним из обязательных в промышленности способов снижения потребляемой ими РМ. Эти вопросы достаточно подробно изложены в [6,7].
Однако нельзя согласиться с мнением специалистов о том, что для повышения cos φ недогруженных АД их всегда следует заменять электродвигателями меньшей мощности. Такая замена целесообразна лишь при загрузке АД менее 45% и нецелесообразна при загрузке более 70% его номинальной мощности. Если же нагрузка АД находится в пределах 45 — 70% номинальной мощности, то должен быть произведен расчет целесообразности такой замены, поскольку при его замене на двигатель меньшей мощности может снизиться КПД двигателя, что приведет к увеличению потерь активной мощности. Если рост потерь активной мощности в АД будет превышать их снижение в электросети, то такая замена недогруженных АД нецелесообразна, и наоборот.
Для определения целесообразности такой замены можно воспользоваться следующими двумя выражениями [7], %:
(14)
 (15)
(15)
где Дрс — экономия потерь активной мощности в сети при замене АД электродвигателем меньшей мощности, %; Дрд— увеличение (уменьшение) потерь активной мощно-
сти в АД, %; AU и AU' — потери напряжения в цепи АД и в питающей магистрали соответственно, %; cos φ1 и cos φ2 и tgф2)—коэффициенты мощности (тангенсы
ф) АД до и после замены соответственно; синфт — синус угла ф питающего трансформатора.
Для положительного решения вопроса замены недогруженных АД необходимо сопоставить друг с другом значения дрс и дрд. Кроме того, из (14) видно, что с увеличением потери напряжения при такой замене возрастает эффект от экономии потерь активной мощности в сети. Следовательно, становится целесообразным в электросетях предприятия выявлять участки со значительными потерями напряжения, т. е. наиболее протяженные участки, и именно на этих участках осуществлять замену недогруженных АД электродвигателями меньшей мощности.
В связи с наличием нескольких методик по определению целесообразности замены недогруженных АД электродвигателями меньшей мощности появляется возможность дополнительной проверки произведенных расчетов любым других методом.
Облегчение условий пуска асинхронных двигателей позволяет исключить их недогрузку в установившихся режимах работы. Для облегчения пуска приводных АД производственных механизмов существует ряд различных устройств и приспособлений.
Например, для облегчения пусковых режимов приводных двигателей вентиляторов приточной и вытяжной вентиляции, пневмотранспортных и им подобных установок на многих предприятиях внедрено устройство, представляющее собой клапан, устанавливаемый перед выхлопным отверстием вентилятора. Пуск двигателя происходит при закрытой задвижке, которая по мере разгона АД автоматически открывает трубопровод вентиляционной установки и при достижении частоты вращения ротора 85 — 90 % номинальной полностью открывает воздуховод, вследствие чего АД оказывается в работе под нагрузкой. Для более четкого регулирования времени открывания заслонки в зависимости от времени пуска АД устройство было модернизировано за счет замены механического расцепителя электрической схемой автоматического управления.
На рис. 2 показаны внешний вид и габариты устройства для облегчения пуска АД вентиляторов, а на рис 3 — электрическая схема его управления. Принцип работы устройства заключается в следующем.
В момент запуска АД выхлопное отверстие вентилятора плотно закрыто заслонкой 1, прилегающей к полкам 2 и удерживаемой защелкой 3, находящейся в зацеплении со скобой 4 при помощи пружины 5 до тех пор, пока АД не достигнет 0,85 — 0,9 номинальной частоты вращения. Затем заслонка под давлением воздуха, нагнетаемого вентилятором, несколько поднимется на величину растяжения пружины 6. Одновременно с пуском двигателя начинает отсчет реле времени РВ (рис. 3), уставка которого отрегулирована для данного агрегата. Замыкающие контакты этого реле приводят к срабатыванию электромагнита ЭМ, который выводит защелку 3 из зацепления со скобой 4 (рис. 2). Заслонка 1 плавно за счет воздушной подушки между нею и стальным патрубком приходит в вертикальное (открытое) положение и нажимает на рычаг 7 конечного выключателя КВ, который обеспечивает электромагнит. В момент отключения двигателя вентилятора линейным контактом J1 (рис. 3) при снижении числа его оборотов рычаг 7 вместе с заслонкой 1 под действием пружины возврата начинает опускаться в горизонтальное (закрытое) положение. При этом рычаг 7 с защелкой 3 опять входит в зацепление со скобой 4 и АД вентилятора оказывается подготовленным к следующему запуску в работу.
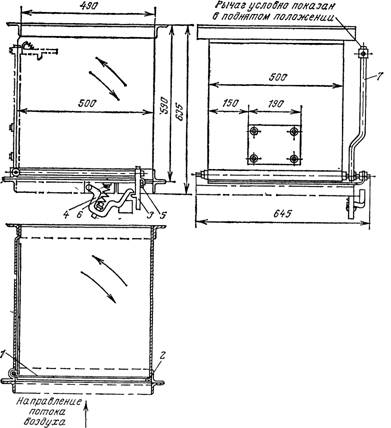
Рис. 2. Внешний вид и габариты устройства для облегчения пуска асинхронных двигателей вентиляторов
В результате облегчения пусковых режимов настоящее устройство дает возможность заменить приводной АД вентилятора двигателем меньшей мощности, что позволяет не только снизить капитальные затраты на электропривод вентиляционной установки, но и повысить экономичность его работы за счет улучшения энергетических показателей АД.
Для плавного пуска АД можно использовать электромагнитные муфты скольжения типа ЭИМСО, выпускаемые на номинальное напряжение 220/380 В при частоте сети 50 Гц. Работа муфты основана на принципе использования вихревых токов. Муфта представляет собой два механически не связанных звена (рис. 4), расположенных концентрически относительно друг друга, между которыми имеется воздушный зазор.

Рис. 3. Электрическая схема управления устройства для облегчения пуска асинхронных двигателей вентиляторов
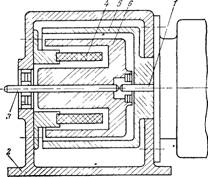
Рис. 4. Электромагнитная муфта скольжения типа ЭИМСО:
1— вал приводного двигателя, 2 — корпус; 3 — выгодной вал муфты, 4— узел возбуждения, 5 — якорь; 6 — индуктор
Внешнее звено (якорь) 5 приводится во вращение асинхронным двигателем, а внутреннее (индуктор) 6 соединяется с валом машины, например валом вентилятора. Пределы регулирования частоты вращения выходного вала составляют от 100 до 1420 об/мин.
Основные параметры автоматизированных приводов с муфтами типа ЭИМСО приведена в табл. 3.
Помимо плавного пуска АД муфты типа ЭИМСО обеспечивают плавное бесступенчатое регулирование частоты вращения приводного вала исполнительного механизма. Сила тяги и частота вращения индуктора регулируются изменением тока возбуждения катушки. Если в катушке возбуждения ток отсутствует, то индуктор не вращается даже при максимальных оборотах якоря.
Данная муфта отличается простотой конструкции, имеет сравнительно небольшие эксплуатационные издержки и обеспечивает возможность дистанционного управления.
Секционирование обмотки статора недогруженных АД позволяет повысить их энергетические показатели. Секционирование обмоток АД возможно осуществить в тех двигателях, где обмотка каждой фазы выполнена в виде двух секций. Это условие зависит от типа обмотки — однослойная она или двухслойная.
Таблица 3. Параметры приводов с электромагнитными муфтами скольжения типа ЭИМСО
Тип муфты | Мощность, передаваемая муфтой, кВт | Номинальный ток возбуждения, А | Номинал1ный крутящий момент, Н см | Масса, кг |
ЭИМСО-15 | 22 | 1,2 | 150 | 960 |
ЭИМСО-30 | 44 | 1,4 | 300 | 1220 |
ЭИМСО-100 | 150 | 4,1 | 1000 | 2000 |
От каждой катушечной группы обмотки на дощечку зажимов выводят два конца — начало и конец фазы Следовательно, у трехфазных АД имеется шесть выводов У двухслойных обмоток лобовые части занимают два слоя, что позволяет вместо шести вывести 12 концов. Для этого на лобовых частях распаивают соединения 'параллельных секций. Если обмотка однослойная, то для ее секционирования предварительно выявляют, позволяет ли размер паза АД уложить вторую секцию обмотки. Размеры большинства серий АД такие, что в них можно уложить вторую секцию.
При наличии 12 выводных концов обмотки можно осуществить несколько способов ее соединения, каждый из которых обеспечивает повышенные энергетические показатели, несмотря на недогрузку АД. На рис. 5 показаны четыре схемы соединения секционированной обмотки статора АД. Применение той или иной схемы соединения обмотки зависит в первую очередь от пределов изменения нагрузки АД.
Например, схему на рис. 5,а можно использовать при загрузке АД на 75— 100% его номинальной мощности По этой схеме обе секции каждой фазы соединены между собой последовательно, а обмотки фаз—в звезду. При такой схеме соединения напряжение на концах обмоток АД равно номинальному.
Схему на рис. 5,6 целесообразно использовать при изменении нагрузки на валу АД в пределах 50 — 75% номинальной мощности двигателя. При такой схеме обе секции каждой фазы соединены между собой последовательно, а обмотки фаз — в треугольник. Этот способ соединения обмоток позволяет снизить напряжение на виток на 0,866 номинального, что обеспечивает повышенные cos φ и КПД недогруженного АД.
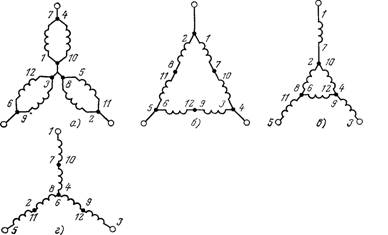
Рис 5. Схемы соединения секционированной обмотки статора асинхронного двигателя:
1, 12 — концы обмоток фаз двигателя
Схему на рис. 5,в целесообразно использовать при загрузках АД на 30 — 50% его номинальной мощности. При такой схеме одна секция каждой фазы включена в треугольник, а другая выводится с вершин этого треугольника. При таком способе соединения напряжение снижается до 0,75 номинального, что также обеспечивает повышенные значения cos φ и КПД недогруженного АД.
Схему на рис. 5,г можно применить при холостой работе АД и его загрузках на валу не более 30% номинальной мощности машины. По такой схеме обе секции каждой фазы соединяются последовательно, а фазовые обмотки включаются в звезду, что дает возможность снизить напряжение до 0,5 номинального значения и соответственно повысить cos φ и КПД недогруженных АД.
На рис. 6 приведены для примера монтажные схемы статорных обмоток АД, секционированных по схеме рис. 5,в и имеющих различное число пар полюсов.
Секционирование обмоток статора практически можно осуществить почти на всех сериях АД общепромышленного назначения или силами энергослужбы предприятия, или при очередном централизованном капитальном ремонте.
При использовании данного метода необходимо обеспечить:
нормальный пуск и разгон АД, что выполняется при соблюдении следующих условий:
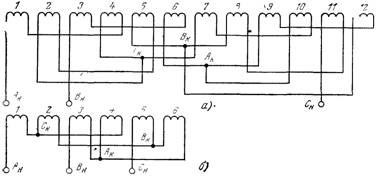
Рис. 6. Монтажные схемы статорных обмоток асинхронных двигателей:
а —для четырехполюсных АД; б — для двухполюсных АД
![]()
рис. 5,г'; здесь МСп — момент сопротивления на валу АД при пуске. При необходимости можно применить переключатель, обеспечивающий пуск АД при более высоком напряжении с последующим переключением схемы обмотки статора на пониженное напряжение;
условия надежной и устойчивой работы, определяемой допустимыми пределами снижения напряжения и кратностью критического момента Мкр/Мном. Исходя из этого, предельный коэффициент нагрузки АД должен быть не более 0,5 МKp/MHом для схемы рис. 5,б; 0,37 Мкр/Мном для схемы рис. 5,в и 0,17 Mkр/MHOм для схемы рис. 5,г;
условие допустимого нагрева АД, вызываемое неизбежностью увеличения тока в роторе при снижении напряжения, несмотря на уменьшение тока холостого хода и потерь мощности в стали статора. Это условие обеспечивается соблюдением указанных выше предельных значений загрузок АД.
Имеется еще ряд специальных способов и приемов для повышения cos φ недогруженных АД путем изменения напряжения, таких, например, как последовательное соединение обмоток статоров двух однотипных АД с одинаковой номинальной мощностью; переключение обмоток статора с треугольника на звезду и т. д.
Остановимся на одном из перспективных способов компенсации реактивной мощности недогруженных АД с помощью тиристорных регуляторов, позволяющих автоматически регулировать действующее значение напряжения, подводимого к АД.
Тиристорные регуляторы для компенсации реактивной мощности недогруженных АД. Если в каждую из фаз обмотки АД включить два встречно-параллельно соединенных тиристора, то изменением их угла открывания можно автоматически регулировать действующее значение напряжения на зажимах АД и обеспечивать требуемое значение их cos φ при изменении нагрузки [7].

Рис. 7. Схемы тиристорных регуляторов для повышения cos φ недогруженных асинхронных двигателей:
а — схема с двумя тиристорами и двумя диодами; б — схема с одним тиристором и одним диодом; в — мостовая схема включения одного тиристора с четырьмя диодами; г — схема с тремя тиристорами и тремя диодами
Данную схему можно упростить, заменив один из тиристоров неуправляемым диодом. По этой схеме можно осуществлять регулирование только в одном из двух полупериодов, при этом диоды обеспечивают прохождение тока за отрицательный полупериод. Кроме того, встречно-параллельное включение тиристора с диодом помимо выполнения основной функции регулирования повышает надежность схемы в результате снижения обратного напряжения на тиристоре. Больше того, по условиям работы АД большинства производственных механизмов с целью упрощения и удешевления тиристорных схем управления оказалось возможным включать тиристоры и диоды не во все фазы двигателя.
На рис. 7 представлен ряд схем тиристорных регуляторов для повышения cos φ недогруженных АД с переменным моментом нагрузки на их валу. Целесообразность применения схем на рис. 7 помимо экономических соображений определяется пределами изменений нагрузки АД и возникновения высших гармонических напряжения и тока, зависящих от угла открывания тиристоров.
Например, схему, изображенную на рис. 7,а, целесообразно использовать при изменениях нагрузки АД в относительно широких пределах (от 0,5 до 0,85 номинальной нагрузки). В этой схеме (что будет показано ниже) искажение кривой синусоидального напряжения в фазах с вентилями будет наблюдаться лишь в области углов а — ф, где а — угол открывания тиристоров, а ф — фазовый угол нагрузки АД.
Схема, изображенная на рис. 7,6, может быть использована при стабильных ограниченных изменениях нагрузки АД в пределах 0,75 — 0,9. В этой схеме лишь в один промежуток а — ф в фазе с вентилями наблюдается незначительное искажение кривой синусоидального напряжения, а в интервалах 0 — ф и а— 2я к нагрузке данной фазы приложено синусоидальное напряжение.
В схеме, изображенной на рис. 7,в, даже при небольших углах открывания тиристоров происходит интенсивное регулирование подводимого напряжения в обоих полупериодах прохождения тока нагрузки. Поэтому данную мостовую схему целесообразно использовать при значительных и стабильных недогрузках АД в пределах 0,5 — 0,7 номинальной.
Схему, изображенную на рис. 7,г, целесообразно применять лишь при периодических весьма малых нагрузках АД, так как даже при минимально возможных углах открывания тиристоров в данной схеме происходят значительные изменения напряжения во всех трех фазах. Ее Применение может быть оправдано лишь при нагрузках менее 0,5 номинальной, что встречается редко. Кроме того, схема рис. 7,г может иметь ограниченное применение из-за более высокой стоимости и большего числа участков однофазной работы АД.
Все схемы рис. 7 используются без нулевого провода, поскольку недостатком схем с нулевым проводом является наличие третьих и кратных им гармонических тока. Наличие таких гармоник влечет за собой не только более значительное искажение кривых тока, но и возможность возникновения опасности поражения обслуживающего персонала электрическим током, так как корпус АД жестко соединен с нулевым проводов и звездой его обмотки статора.
Рис. 8 Диаграмма работы вентилей и форма подводимого напряжения при угле открывания тиристоров а=75°.

а — кривые, фазных и линейных напряжений, приложенных к двигателю при а=0°, б — интервалы прохождения тока нагрузки по обмоткам статора, в — кривая напряжения, приложенная к нагрузке фазы А при а=75°
В схеме рис. 7 вентили включены после обмоток АД, что повышает надежность работы силовых вентилей и упрощает блок управления углом открывания тиристоров.
В схемах без нулевого провода действующее значение фазного напряжения зависит от соединения тиристоров в других фазах.
Например, рассматривая на рис. 8 переключение вентилей, соединенных по схеме рис. 7,г, видим, что в период от 0° до угла ф к обмотке фазы А приложено синусоидальное напряжение, так как концы всех трех фаз имеют" по отношению к нулевой точке обмотки статора одинаковый потенциал. Начиная с угла ф до угла открывания тиристоров а, т. е. в интервале углов а—ф, для фазы А начинается бестоковая пауза и, следовательно, напряжение на этой фазе будет равно нулю. В момент а открывается тиристор 77 этой фазы, и до периода ф-|~2я/3, т. е. пока не закроется диод Д2, к нагрузке фазы А снова будет приложено фазное напряжение. В момент ф-2я/3 закрывается диод Д2 и до открытия тиристора Т2, т. е. в интервале а—ф, нагрузка фаз А и С будет подключена проводящими концами тиристора Т1 и диода ДЗ и, следовательно, напряжение на каждой из этих фаз будет равно '0,5£/са. В интервале углов от а-|-2я/3 (момент открытия тиристоров Т2) до ф-(-4я/3 (закрытие диода ДЗ) к нагрузке всех фаз опять будет приложено фазное напряжение. После этого закрывается диод ДЗ (что произойдет в момент ф-f- -|-4л/3 и по открытии тиристора ТЗ, т. е. опять в промежутке углов а—ф), нагрузка фаз А и В подключится проводящими концами Д1 и Т2, вследствие чего напряжение каждой из этих фаз будет равно 0,5С/дв Затем процесс переключения вентилей, соединенных по данной схеме, будет повторяться в той же последовательности. Из диаграммы работы вентилей видно, что однофазный режим АД с тиристорными регуляторами наблюдается лишь в интервале углов а—ф.
Таким образом, прохождение тока в схемах без нулевого провода в общем случае возможно лишь при одновременном открытии не менее
двух вентилей, включенных в разные фазы статорной цепи АД, а для этого необходимо, чтобы в диапазоне изменений угла открывания тиристоров ширина управляющего импульса была не менее 30° (если на» грузка АД меняется в пределах 0,5—0,85, то фазовый угол <р изменяется соответственно в пределах 60—30°) С уменьшением числа силовых вентилей в цепи статора АД форма кривой подводимого напряжения становится более синусоидальной Например, в схеме на рис 7,6
Таблица 4 Осциллограммы кривых тока и напряжения в схемах тиристорных регуляторов при угле открывания тиристоров а = 90

количество однофазных участков работы АД в три раза меньше по сравнению с числом однофазных участков работы АД по схеме рис 7,г.
Осциллограммы работы тиристорных регуляторов по схемам рис 7 и опыт их работы в производственных условиях подтверждают возможность повышения cos φ недогруженных АД рассмотренным методом
Например, в табл 4 показаны осциллограммы кривых тока и напряжения в схемах тиристорных регуляторов рис 7,а и б при различных недогрузках АД и угле открывания тиристоров а=90° Из этих осциллограмм видно, что с уменьшением пределов регулирования подводимого к АД напряжения форма кривых тока и напряжения становится более синусоидальной
На рис 9 приведены кривые зависимости относительного значения напряжения у=и/ином от угла открывания тиристоров при различных моментах нагрузки на валу АД для схем рис. 7,а и б Из анализа этих кривых видно, что с увеличением нагрузки АД при одном и том же угле открывания тиристоров а действующее значение подводимого напряжения снижается В условиях меньших нагрузок напряжение снижается при больших углах открывания тиристоров.

Рис. 9. Зависимость относительного значения напряжения у = U/U ном от угла открывания тиристоров а при различных моментах нагрузки jj, на валу асинхронного двигателя сплошные линии — для схемы рис 7 а пунктирные линии для схемы рис 7 б
Анализ высших гармонических напряжения и тока в схемах с тиристорными регуляторами по рис 7 с последующей проверкой полученных результатов по анализатору высших гармоник и селективному
микровольтметру, предназначенному для измерения напряжения синусоидального тока, показал, что высшие гармонические в рассмотренных схемах весьма небольшие Отклонения действующего значения несинусоидального напряжения от основной ее гармоники не превышали 0,5 %.
На рис 10 в качестве примера представлены высшие гармонические составляющие кривой подводимого напряжения для схемы рис 7,а при моменте нагрузки на валу двигателя 0,6 номинального и угле открывания тиристоров 100°. Эти кривые подтверждают благоприятную оценку рассматриваемых схем тиристорных регуляторов
На рис. 11 представлена структурная схема управления углом открывания тиристоров для схемы включения вентилей по рис. 7,а [8]. Данная схема содержит пять блоков- блок усилитель-формирователь УФ, блок регулируемой задержки БРЗ, фазосдвигающий блок ФСБ, блок открывания тиристоров БОТ и блок питания БП. Первые четыре блока представляют собой регулятор системы, а объектом регулирования является АД, к которому приложены два возмущающих воздействия, одним из которых является напряжение сети, а другим — импульс от регулятора, длительность которого зависит от тока нагрузки, проходящего через датчик. Датчиком является малое активное сопротивление, включенное в одну из фаз статора. Первое возмущающее воздействие — напряжение сети — практически постоянно, а его небольшие возможные колебания автоматически учитываются системой регулирования за счет изменения тока нагрузки.
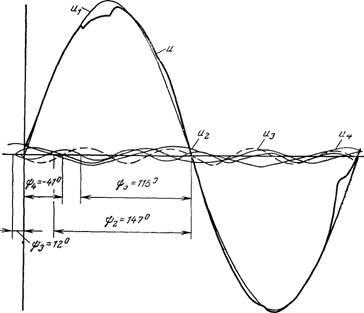
Рис 10 Высшие гармонические кривой подводимого напряжения для схемы рис 7,а при моменте нагрузки на валу двигателя мю=0,6 и угле открывания тиристоров d=100°
Поэтому в схеме единственным управляющим возмущающим воздействием будет импульс регулятора на открывание тиристоров, которые являются в схеме регулирующими элементами.
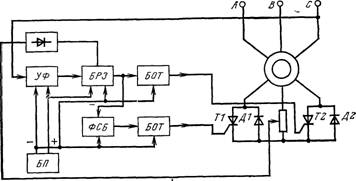
Рис. 11. Структурная схема управления углом открывания тиристоров для схемы их включения по рис. 7,а
На рис. 12 показан порядок формирования импульсов в схеме управления углом открывания тиристоров, фронт и спад которых соответствуют фронту и спаду прямоугольных импульсов.
Принцип работы схемы рис. 11 состоит в следующем.
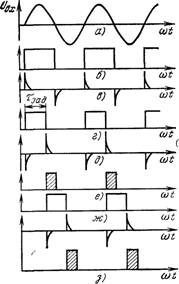
Рис 12 Порядок формирования импульсов в схеме управления углом открывания тиристоров
Синусоидальный импульс от фазы С (рис. 12,а) попадает на вход схемы, а УФ совместно с БРЗ формирует прямоугольный импульс длительностью, соответствующей углу открывания тиристоров (рис. 12,6, в, г).

Рис 13 Упрощенная модернизированная схема управления углом открывания тиристоров
Выходной импульс с БРЗ (рис. 12,д, ж) подается на два БОТ, включающие тиристоры фаз А (рис. 12,з) и С (рис. 12,е). При этом тиристор фазы А за счет ФСБ включается через 120° по отношению к фазе С. Отклонения тока статора от заданной величины воспринимаются регулятором, который, воздействуя на объект, доводит ток статора до необходимого значения, обеспечивающего оптимальный cos φ недогруженного АД.
Особенностью схемы на рис. 11 является ее запуск лишь от одного сигнала соответствующей фазы независимо от числа тиристоров в цепи двигателя. Сигнал на запуск тиристоров взят от фазы С, благодаря чему из схемы рис. 11 исключен полностью один из фазосдвигающих блоков.
Вместо схемы на рис. 11 можно использовать упрощенную схему на рис. 13, применение которой повысит КПД асинхронного двигателя [9]. Последняя схема отличается тем, что она содержит дополнительный резистор R2, включенный последовательно с основным резистором Д1. Свободные выводы этих резисторов подключены к Выходу выпрямителя и ко входу блока управления БУ тиристорами, а точка соединения резисторов подключена к третьей фазе обмотки статора АД.
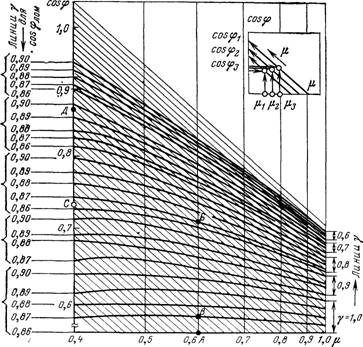
Рис. 14. Номограмма для определения значений напряжения y в условиях повышения cos q> недогруженных асинхронных двигателей при различных моментах нагрузки р, на их валу
Принцип работы такой схемы управления заключается в том, что ток третьей фазы проходит по резисторам R1 и R2 поочередно по полупериодам и создает падения напряжения, которые, складываясь, образуют выпрямленный сигнал, пропорциональный току и поступающий на вход системы БУ. В зависимости от величины сигнала обратной связи система БУ изменяет фазу отпирающих импульсов, управляя тем самым АД.
Для определения пределов регулирования подводимого к АД напряжения, при которых обеспечивается повышение cos φ недогруженных АД помимо расчетных формул, приведенных в [7], можно воспользоваться номограммой, которая построена на рис. 14 для АД общепромышленного применения с номинальными значениями cos φНом, равным 0,86; 0,87; 0,88; 0,89 и 0,9. Правила пользования номограммой следующие.
При единой ординате cos φ имеется ряд осей нагрузок мю =М/Мном для АД с различными номинальными значениями cos φном. Вместе с тем для этих же АД на номограмме представлены линии напряжения y=\UIUHou, каждая из которых разбита на отдельные группы, имеющие различные пределы изменения подводимого напряжения: от 7—1,0 до 7 = 0,6. Например, при номинальном напряжении y=1 для АД с cos φном = 0,87 и коэффициентом нагрузки р, = 0,6 значения cos φ = 0,73 (отрезки прямых АВ—ВС). Для получения примерно номинального соэф при той же загрузке АД подводимое напряжение необходимо снизить до 7=0,8 (отрезки прямых АБ — БД).
Таким образом по номограмме можно определить то напряжение, при которой обеспечивается повышение значения cos φ, несмотря на недогрузки АД.
При компенсации реактивной мощности у сравнительно энергоемких АД следует учитывать разброс характеристик намагничивания. Особенно специфична компенсация реактивной мощности у АД, включенных в системы асинхронно-вентильных каскадов, заключающаяся в наличии искажений, вносимых в сеть инвертирующим преобразователем, который осуществляет возврат в электросеть энергии скольжения АД. В этом случае обычная компенсация реактивной мощности, например с помощью КУ, недопустима по причине возможного возникновения резонанса емкости КУ с индуктивностью электросети. В таких системах с асинхронно-вентильными каскадами необходима установка фильтров высших гармонических, осуществляющих наряду с фильтрацией высших гармоник тока преобразователя и компенсацию реактивного тока основной частоты.