11 ФУНКЦИОНАЛЬНОЕ АВТОМАТИЧЕСКОЕ
УПРАВЛЕНИЕ РМ
На многих предприятиях КУ собирают из отдельных конденсаторов напряжением до 1000 В. В этом случае их можно снабдить автоматическим регулятором с регулированием в различных функциях. Функциональное автоматическое управление реактивной мощностью КУ может быть выполнено как с помощью релейно-контакторной аппаратуры, так и с применением бесконтактной техники в различных функциях: по cos φ, току нагрузки, характеру реактивной нагрузки (индуктивная или емкостная), напряжению сети, времени суток и т. д.
Автоматическое управление в функции cos φ. Данный вид автоматического управления реактивной мощности является чрезвычайно удобным, поскольку регулирует мощность БК непосредственно по значению cos φ. В качестве датчика при таком способе управления используется обычный щитовой трехфазный фазометр, на конец стрелки которого следует укрепить флажок из светонепроницаемого материала с таким размером, чтобы на шкале прибора перекрывались значения cos φ в необходимых пределах регулирования. Затем для требуемых пределов регулирования cos φ необходимо произвести переградуировку шкалы с учетом тяжести флажка. На шкале прибора против двух крайних значений cos φ1 и cos φг необходимо сделать отверстия по размеру активной части фоторезисторов, которые следует укрепить с внутренней стороны шкалы фазометра. Предохранительное стекло прибора целесообразно заменить пластиной из светонепроницаемого материала со щелями против активной части фоторезисторов. Два фоторезистора, укрепленные с внутренней стороны шкалы фазометра, включаются по схеме рис. 27, которая дает сигналы на срабатывание двух промежуточных реле 1РП и 2РП.
Принцип работы данной схемы заключается в следующем. С делителя напряжения R1—R2 (Rl = 33 кОм; R2 — =51 кОм) выпрямленное диодом Д (типа Д226Б) напряжение подается на аноды тиратронов 77 и Т2 через резисторы R3 (1 кОм) и R8 (1 кОм) и обмотки промежуточных реле 1РП и 2РП, а через фоторезисторы R5 и R6 и потенциометры R4 (220 кОм) и R7 (220 кОм) —на цепи питания сеток тиратронов,
Когда cos φ меньше cos φ1 (крайнего низшего предела, фоторезисторы освещаются и их сопротивления резко снижаются; ток, проходящий через потенциометры, увеличивается, в результате чего напряжение на сетках тиратронов 77 и Т2 повышается до значения напряжения зажигания разряда между сеткой и катодом. Тиратроны зажигаются, и реле 1РП и 2РП срабатывают, а их замыкающие контакты 1РП.1 и 2РП.1 включают цепи схемы автоматического управления четырех секций БК, которая приведена на рис. 28.

Рис. -27. Схема датчика для автоматического управления мощностью БК в функции cos φ
Когда cos φ равен косф1 световой луч» падающий на фоторезистор R5 (см, рис. 27), перекрывается флажком; при этом сопротивление фоторезистора резко возрастает, s результате чего напряжение на сетке тиратрона снижается, тиратрон запирается и катушка реле 1РП обесточивается. Когда cos φ больше cos φ2 (крайний верхний предел регулирования), то аналогичным образом перекрывается световой луч, падающий на фоторезистор R6, я обесточивается катушка реле 2РП.
В схеме рис. 28 автоматического управления предусмотрено и ручное управление при помощи переключателя П. Принцип работы этой схемы заключается в следующем.
Когда катушки обоих реле 1РП и 2РП подтянуты, их замыкающие контакты 1РП.1 и 2РП.1 включают цепь катушки реле времени 1РВ. Замыкающий контакт реле 1РВ.1 с выдержкой времени включает цепь катушки 1Л линейного контактора первой секции БК. В свою очередь замыкающий контакт 1Л.2 включает цепь катушки реле времени ЗРВ с последующим замыканием цепи катушки линейного контактора 2Л второй секции БК, и так секции конденсаторных батарей будут последовательно включаться до тех пор, пока не перекроется световой луч, падающий на фоторезистор R5 (в схеме на рис. 27), что может иметь место лишь тогда, когда cos φ равен cos φ1. При этом катушки реле времени отпадут, но соответствующие секции БК останутся включенными, так как контакты реле сблокированы линейными контакторами.
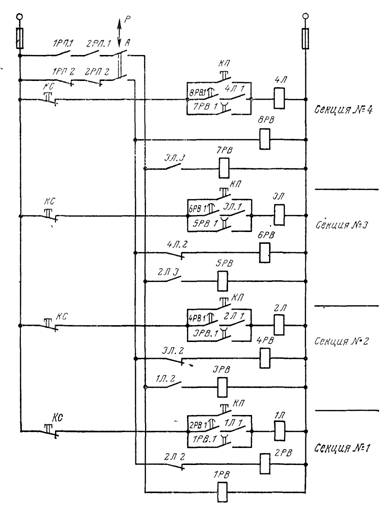
Рис. 28. Схема автоматического регулирования мощности четырех секций БК в функции cos φ
Если же cos φ превысит крайний верхний предел сcos φ2, то кроме первого фоторезистора перекроется световой луч, падающий на фоторезистор R5 (в схеме на рис. 27), что может иметь место лишь при cos φ—cos φ1. При этом катушки реле времени отпадут, но соответствующие секции БК останутся включенными, так как контакты реле сблокированы линейными контакторами.
Если же cos φ превысит крайний верхний предел cos φ2, то кроме первого фоторезистора перекроется и второй фоторезистор R6. При этом размыкающие контакты промежуточных реле 1РП.2 и 2РП.2 создадут цепи для включения катушек реле времени, обозначенные на рис. 28 четными номерами: 2РВ, 4РВ, 6РВ и 8РВ. Предположим, что последняя включенная секция БК — третья. Тогда образуется следующая замкнутая цепочка на включение катушки реле 6РВ: 1РП.2—2РП.2 — переключатель — 4Л.2—6РВ. Реле 6РВ своим размыкающим контактом разомкнет цепь питания катушки линейного контактора 3Л третьей секции БК, а размыкающие контакты его 3Л.3 подготовят к включению цепь питания катушки реле времени 4РВ. И так последовательно с выдержкой времени секции БК будут отключаться до тех пор, пока на схеме рис. 27 будет закрыт фоторезистор R6, т. е. пока значение cos φ будет превышать крайний верхний предел cos φ2. При значениях cos φ между cos φ1 и cos φ2 переключений в схеме не происходит.
Схему автоматического регулирования реактивной мощности по рис. 28 в функции cos φ целесообразно использовать не только для повышения cos φ, но и для ограничения его верхнего предела. Такое требование зачастую предъявляют предприятиям энергоснабжающие организации [1]. Кроме того, преимуществом данной схемы автоматического регулирования реактивной мощности является то, что датчик связан с сетью не электрически (что создавало бы ряд недостатков, связанных с ложным срабатыванием и т. д.), а оптически при помощи фоторезисторов,
Подобный вариант схемы разработан в Алма-Атинском филиале Ташкентского института инженеров железнодорожного транспорта. Это схема с трехступенчатым регулированием на базе конденсаторов типа КС-1-0.38-ЗУЗ. На рис. 29 приведены основные узлы этой схемы, которая, как и в предыдущем варианте, состоит из фазометра 1 с фотоэлементами 3 и 5, рычагами их перемещений 4 и упорами 2 для ограничения хода стрелки фазометра (рис. 29, а), лампочками 6 для освещения шкалы (рис. 29,6).

Рис. 29. Датчик для автоматического трехступенчатого регулирования реактивной мощности в функции cos φ:
а — внешний вид фазометра со стрелкой и рычагами для перемещения фотоэлементов; б — лампа для освещения шкалы с фотодатчиками и реле, в — переключающее устройство; г — переключатель с подвижным контактом
Переключающее устройство содержит контакты 7 и 8 реле включения реверсивного двигателя 9 (рис. 29,в), суммирующий переключатель 10 с подвижным контактом 11 и катушками магнитных пускателей 12 БК (рис. 29,г).
Рычагом перемещения 4 фотоэлементов 3 и 5 устанавливаются два необходимых граничных значения cos φ. При снижении cos φ ниже заданного предела стрелка фазометра закрывает фотоэлемент 3, который фиксирует сигнал для включения контактов 7. В результате двигатель 9 начнет вращаться вместе с подвижным контактом 11, который и включает катушки магнитных пускателей и БК. При включении БК cos φ возрастает, стрелка фазометра открывает отверстие с фотоэлементами 5 и формирование сигнала прекращается, в результате контакты 7 размыкаются, что приводит к остановке двигателя и подвижного контакта.
Если соsф возрастает выше заданного предела, то стрелка фазометра закрывает отверстие с фотоэлементом 5, который формирует сигнал на замыкание контактов 8, и двигатель начинает вращаться в обратную сторону, в результате чего подвижной контакт отключает контакты магнитных пускателей до тех пор, пока стрелка фазометра не откроет отверстие с фотоэлементом 3. В среднем положении стрелки между отверстиями с фотоэлементами 3 и 5 переключений в схеме не происходит. Принцип работы системы управления аналогичен принципу работы схемы на рис. 28. Для защиты от ложных срабатываний при кратковременных изменениях cos φ в схеме предусмотрено реле времени, обеспечивающее выдержку времени от 10 с до 10,мин при включении цепи питания реверсивного двигателя 9.
Данная конструкция отличается высокой надежностью в работе, простотой обслуживания и сравнительно невысокой стоимостью.
Автоматическое управление в функции тока нагрузки.
При современном уровне развития промышленной электроэнергетики, наличии сложного электрооборудования, преобразовательной полупроводниковой техники, автоматических поточных линий режимы работы потребителей электрической энергии постоянно изменяются, а иногда имеют и резкопеременный характер во времени, что связано 'с изменением их активной и реактивной мощностей, Исходя из этого, для автоматизации процесса компенсации реактивной мощности становится целесообразным выполнять регулирование РМ конденсаторных установок в функции тока нагрузки.
Схемы автоматической компенсации реактивной мощности в функции тока нагрузки, состоящие из серийных элементов, являются простыми устройствами, отличаются надежностью в работе и обеспечивают автоматическое регулирование РМ в любых требуемых пределах. Ниже рассмотрено несколько вариантов автоматической компенсации реактивной мощности в функции тока нагрузки с использованием релейно-контакторной аппаратуры и с применением бесконтактных элементов.
Схема релейно-контакторного управления.
На рис. 30 представлена схема автоматического регулирования мощности двух секций БК в функции тока нагрузки. Схема включает в себя четыре токовых реле 1РТ—4РТ с токами уставки 1, 2, 3 и 4 А и четыре реле времени 1РВ—4РВ,
Схема построена так, что при возрастании тока нагрузки во вторичной цепи трансформатора тока до 2 А включается первая секция БК, а до 4 А — вторая секция. Вспомогательные контакты линейных контакторов 1Л 2 и 2Л 2 блокируют соответственно контакты реле 2РТ.1 и 4РТ.1.
Если нагрузка снизится до 3 А и ниже, то обесточится катушка реле ЗРТ, в результате реле времени ЗРВ своим размыкающим контактом ЗРВ Л отключит цепь контактора 2Л и соответственно вторую секцию БК. При токе от 3 до
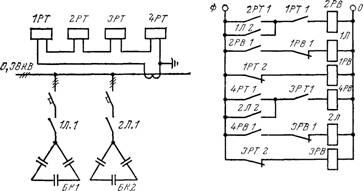
Рис 30. Релейно-контакторная схема автоматического регулирования мощности двух секций БК в функции тока нагрузки
4 А конденсаторы от сети не отключаются из-за блокировки контакта 4РТ.1 реле 4РТ. При дальнейшем уменьшений нагрузки в электросети от 1 А обесточивается катушка реле 1РТ. В результате реле времени 1РВ с выдержкой времени отключит цепь катушки линейного контактора 1Л и первую секцию БК. Блокировка контактов реле 2РТ.1 и 4РТ.1 обеспечивает отключение секций БК только токовыми реле 1РТ и ЗРТ, в результате чего секции БК отключатся при токах во вторичной цепи трансформатора тока, равных 3 А (вторая секция) и 1 А (первая секция), а не при 4 и 2 А.
Схема управления с использованием бесконтактных элементов. На рис. 31 приведена схема автоматического управления реактивной мощности в функции тока нагрузки с применением бесконтактных элементов для четырех секций БК. В этой схеме датчиком является индуктивная катушка L, состоящая из провода диаметром 0,11 мм, намотанного на сердечник, состоящий из пластин прямоугольной формы размером 5X7 мм. Катушка содержит 5000 витков и расположена в непосредственной близости от одной из шин. Схема работает следующим образом.
При прохождении тока нагрузки по шине в катушке L наводится ЭДС Переменное напряжение, выпрямленное мостом, состоящим из четырех диодов Д1—Д4 типа Д7Г, подается на конденсатор С1 (200 мкФ на 50 В), служащий фильтром, и С2 (4000 мкФ на 25 В), который заряжается через потенциометр R1 (47 кОм), осуществляющий регулировку времени заряда.
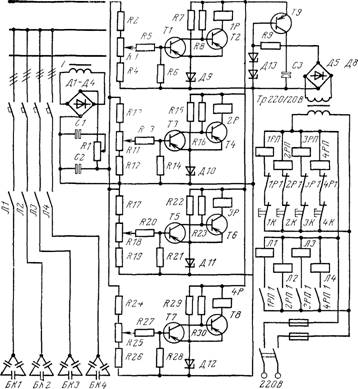
Рис 31 Схема автоматического регулирования мощности четырех секций БК в функции тока нагрузки с применением бесконтактных элементов
Напряжение с этого конденсатора подается на делители напряжения, число которых должно соответствовать количеству регулируемых секций БК, т. е. для данной схемы — четырем Делитель напряжения состоит из двух резисторов R2 (3 кОм) и R4 (3 кОм) и одного потенциометра R3 (47 кОм), которым регулируется напряжение, подаваемое на базу каждого из транзисторов Т1, ТЗ, Т5 и Т7.

Рис 32. Внешний вид схемы автоматического управления четырех секций БК в функции тока нагрузки с применением бесконтактных элементов
Если ток нагрузки невелик, то напряжение на конденсаторе С2 (4000 мкФ) тоже будет незначительно. В этом случае транзисторы Т1, ТЗ, Т5 и Т7 будут закрыты, так как напряжение на стабилитроне Д9 типа Д808 (8 В) будет приложено к базам этих транзисторов через резистор R5 (51 кОм) и делитель R3 и R4. При этом транзисторы Т2, Т4, Тб и Т8 будут открыты и катушки реле IP, 2Р, ЗР и 4Р будут притянуты. При возрастании тока нагрузки напряжение на конденсаторе С2 также будет возрастать с задержкой по времени, определяемой постоянной времени цепочки R1C2. Когда напряжение на конденсаторе достигнет определенного значения (в данном случае примерно 15 В), напряжение, подаваемое с делителя R2-R3-R4 на базу транзисторов Т1, ТЗ, Т5 и 77, становится достаточным для их открытия, что соответственно вызывает закрытие транзисторов Т2, Т4, Т6 и Т8 с последующим отключением катушек реле IP, 2Р, ЗР и 4Р в цепях коллекторов этих транзисторов. Напряжение сравнения в данной схеме можно плавно регулировать потенциометром делителя. Реле IP, 2Р, ЗР и 4Р размыкающими контактами соответственно включают катушки промежуточных реле 1РП, 2РП, ЗРП и 4РП, контакты которых включают линейные контакторы секций БК—1Л, 2Л, ЗЛ и 4Л. В цепи катушек линейных контакторов включены четыре выключателя 1К—4К для ручного отключения на случай ревизии или ремонта БК. Транзистор T9 типа П4Б в схеме служит для стабилизации напряжения.
Данная схема показала себя надежной в работе, состоит из серийных элементов и проста в обслуживании. На рис. 32 приведен внешний вид схемы автоматического управления четырех секций БК.
Бесконтактная схема управления в функции реактивной составляющей тока. В качестве датчика реактивной составляющей тока может быть использован фазочувствительный выпрямитель (демодулятор), собранный по одно- или двухполупериодной схеме (однофазный или трехфазный). На выходе демодулятора образуется напряжение, пропорциональное реактивному току в линии. Знак этого напряжения зависит от характера реактивного тока (индуктивный или емкостный).

Рис. 33. Бесконтактная схема управления в функции реактивной составляющей тока:
а — схема подключения демодулятора к сети; б — схема демодулятора, в — схема включения реле к выходу демодулятора; г — схема включения реле к выходу демодулятора с улучшенной фильтрацией сигнала
Входным сигналом демодулятора является сигнал с трансформатора тока.
На рис. 33, а показано, что трансформатор тока ТТ1 подключается к демодулятору через промежуточный трансформатор тока ТТ2, имеющий средний отвод, с коэффициентом трансформации порядка 5/0,06—0,2 А, так как вторичный ток стандартных трансформаторов тока (ТК-40, ТК-20) обычно равен 5 А. Нагрузка трансформатора тока' устанавливается на уровне 1—3 Ом, что обычно намного' больше номинальной (0,4 Ом). При этом трансформатор тока будет работать с повышенной до 3 % по сравнению с паспортным значением погрешностью по току, что практически в условиях автоматического регулирования реактивной мощности вполне допустимо.
На рис. 33,6 приведена схема демодулятора. В качестве задающего напряжения U3 для фазы А используется линейное напряжение фаз В и С UBc. На выходе демодулятора включается поляризованное или обычное реле по схеме на рис. 33, в или г. Предпочтительней является схема рис. 33, г, так как в ней улучшается фильтрация сигнала
и, кроме того, создается небольшая выдержка времени до 0,1 с, что повышает помехоустойчивость схемы. В этих схемах (рис. 33, в, г) с целью уменьшения нагрузки на демодулятор целесообразно применение поляризованных реле. Автоматическое управление в функции характера реактивной нагрузки. Основной задачей автоматической компенсации реактивной мощности в функции характера реактивной нагрузки (индуктивная или емкостная) является недопустимость перекомпенсации и отдачи в сеть реактивной мощности.
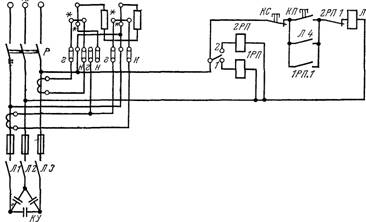
Рис 34. Схема автоматического управления реактивной мощности в функции характера реактивной нагрузки
Наиболее простой схемой управления является схема, приведенная на рис. 34, в основу которой положен принцип* работы индукционного ваттметра или обычного счетчика реактивной энергии, выполненный с упором. Работа схемы происходит следующим образом.
В часы полной нагрузки в сетях предприятия диск счетчика вращается против часовой стрелки и своим штырьком (упором) замыкает контакт 1. В результате включаются промежуточное реле 1РП и катушка линейного контактора Л, а затем и БК. В часы минимальной нагрузки в электросетях предприятия, что имеет место в основном в ночную смену, т. е. в период возможной перекомпенсации реактивной мощности, диск счетчика вращается в обратную сторону — по часовой стрелке. В результате этого упор замыкает контакт 2, что приводит к срабатыванию промежуточного реле 2РП, которое своим размыкающим контактором 2РП.1 обесточивает цепь питания катушки контактора J1, и БК отключается от сети.

Рис. 35. Кинематическая схема исполнительного механизма устройства по автоматической компенсации реактивной мощности в функции характера реактивной нагрузки

Рис. 36. Общий вид устройства автоматического регулирования реактивной мощности в функции характера реактивной нагрузки
Схему на рис. 34 можно применять лишь для КУ сравнительно малой мощности, поскольку она обеспечивает одноступенчатое включение и отключение только одной БК. При этом мощность БК ограничивается параметрами линейного контактора Л. Однако если данную схему дополнить исполнительным механизмом с несколькими контактами датчика, число которых соответствует количеству регулируемых. секций БК, то область применения автоматического регулирования реактивной мощности в функции характера реактивной нагрузки можно значительно расширить и регулирование мощности БК сделать многоступенчатым.

Рис 37 Схема датчика
а — внешний вид, б — контакты
датчика
На рис 35 представлена кинематическая схема одного из таких исполнительных механизмов, содержащих исполнительный двигатель 1 с редуктором 2, дополнительный сектор 3 и кулачки 4, частота вращения которого не превышает 1 об/мин. На рис. 36 приведен общий вид такого устройства. На рис. 37 представлен датчик, в качестве которого использован счетчик реактивной энергии, с которого снят счетный механизм. На оси дисков установлен диск 4 из изоляционного материала с прорезью, в которую введен средний лепесток (флажок) 2 (рис. 37,6) датчика.
Через контакты датчика 1,2 и 3 подается напряжение на ка тушки промежуточных реле 1РП и 2РП, показанные на рис. 38.
В зависимости от характера реактивной нагрузки в электросети ось счетчика вращается в ту или другую сторону и своим лепестком замыкает соответствующие контакты пускателей. В результате этого исполнительный двигатель, вращаясь в ту или другую сторону, действует на путевые конечные выключатели 1ВК, 2ВК, ЗВК и 4ВК (рис. 35), которые через линейные контакторы IK, 2К и ЗК включают соответствующие секции/БК (рис. 38).
На рис 38 приведена схема автоматической компенсации реактивной мощности трех секций БК, принцип работы которой заключается в следующем.
При подаче на схему напряжения включается промежуточное реле РП, а его контакт РП.2 подает питание на контакт датчика 2 и конечные выключатели 1ВК, 2ВК и ЗВК (типа ВК-211) При преобладании в электросети индуктивно-реактивной нагрузки диск счетчика вращается против часовой стрелки и тем самым замыкает контакт датчика 1КД с контактом 2 (см. рис. 37). В результате срабатывает промежуточное реле 1РП (рис 38), замыкающие контакты которого 1РП.1 включают пускатель КВ сектора «вперед» и через редуктор двигателя вращают сектор вправо, что приводит к включению конечных выключателей 4ВК и 1BR (см. рис. 35) и соответствующему подключению к сети первой секции БК. В схеме 4ВК. представляет собой конечный выключатель исходного положения.
Если же в электросети преобладает емкостная реактивная .нагрузка (например, в ночное время), то диск счетчика вращается по часовой стрелке и замыкает свой контакт датчика 2КД с контактом 2 (см. рис. 37).

Рис 38 Схема автоматической компенсации реактивной мощности трех секций БК Ь функции характера реактивной нагрузки
В результате этого получает питание промежуточное реле 2РП, замыкающие контакты которого включают катушку магнитного пускателя КН сектора «назад». Исполнительный двигатель через редуктор начинает вращать сектор влево, отключая требуемое количество путевых выключателей и соответственно секции БК. Если в цепи индуктивная нагрузка не преобладает, то контакт 1КД датчика разомкнут. Нажатием сектора на путевой выключатель ВК1 от реле 1РП - отключается питание, и через контакты этого реле обесточивается цепь магнитного пускателя сектора «вперед».
В схеме на рис. 38 предусмотрена электрическая блокировка контактами КВ. 1, КН.1, 2РП.1 и 1РП.1.
В промышленных электросетях применяется схема автоматического регулирования реактивной мощности по характеру реактивной нагрузки, в которой исполнительным механизмом является серводвигатель, а в качестве переключающих аппаратов используются воздушные автоматические выключатели типа АВМ-10 с моторным приводом. В такой схеме датчиком может служить обычный счетчик реактивной энергии типа СРЗУ несколько измененной конструкции. Изменение конструкции счетчика достигнуто за счет ввода двух дополнительных контактов 1 и 2 (рис. 39). Датчик настраивается на определенное значение коэффициента мощности, ниже которого замыкается контакт 1 датчика, а выше — его контакт 2.
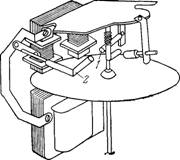
Рис. 39. Счетчик-датчик реактивной энергии с дополнительными контактами
На рис. 40 приведена схема автоматического управления реактивной мощности трех секций БК в зависимости от характера реактивной нагрузки с применением серводвигателя в качестве исполнительного механизма. Принцип работы этой схемы заключается в следующем.
При cos φ ниже определенного заданного предела замыкается контакт 1 датчика, что приводит к включению реле 1Р, которое своими замыкающими контактами 1Р.4 включает серводвигатель СД, замыкающий с заданной выдержкой времени последовательно щеточные контакты а, б, в, г, д, е, благодаря чему через промежуточные реле 1РП— ЗРП включаются соответствующие автоматы секций БК. Промежуточное реле РП используется для обеспечения более плавного процесса регулирования за счет включения промежуточной секции БК. Положение каждого из автоматических выключателей фиксируется соответствующей сигнальной лампой.
При превышении необходимого фиксированного значения cos φ замыкается контакт 2 датчика и включается реле 2РП, что приводит к перемещению серводвигателя в обратную сторону и последующему отключению секций БК в порядке, обратном порядку их включения.
В схеме предусмотрены автоматический и ручной режимы управления, а именно: автоматический — при замкнутом тумблере Т и ручной — с помощью кнопок КП и КС (пуск и стоп) при отключенном тумблере Т.
На аналогичном принципе действует устройство автоматической компенсации реактивной мощности с применением двухпредельного датчика cos φ, представляющее собой конструктивно шкаф управления, который навешивается на КУ или в удобном для эксплуатации месте. Этот датчик состоит из двух фазочувствительных устройств, включающих в себя однофазные
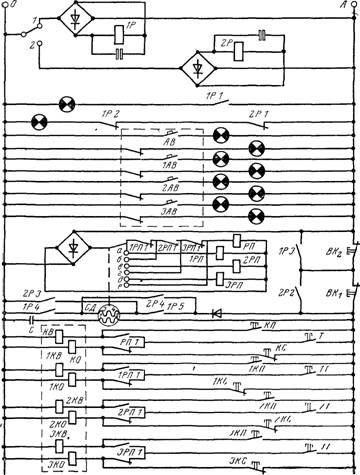
Рис 40 Схема автоматического регулирования трех секций БК с применением серводвигателя в функции характера реактивной нагрузки
Счетчики активной энергии типа СО, переменные резисторы и два поляризованных реле. Устройство имеет два режима работы: ручной и автоматический.
Принцип действия датчика заключается в том, что при перпендикулярности вектора тока вектору напряжения диск счетчика СО неподвижен. При нарушении перпендикулярности диск счетчика вращается в прямом или обратном направлении (в зависимости от характера реактивной нагрузки), обеспечивая появление сигнала на включение или отключение КУ (т. е. на увеличение или уменьшение мощности КУ). Зона регулирования имеет пределы от нижнего cos φ=0,94-0,92 до верхнего cos φ=0,9б-т-0,98. В качестве исполнительного элемента устройства применяются обычные промежуточные реле, включающие линейные контакторы отдельных секций БК.
При подключении устройства к сети необходимо соблюдать последовательность чередования фаз, а для его настройки следует иметь фазометр и подобрать нагрузку с таким расчетом, чтобы можно было изменять ток и cos φ нагрузки.
Автоматическое управление в функции времени суток.
Автоматическое управление РМ по времени суток выполняется, как правило, по специальному графику, зависящему от технологии и характера производства, или специальной программе энергоснабжающей организации. В качестве датчиков при таком регулировании используются электрические вторичные сигнальные часы типа ЭВЧС-24, имеющие 24-часовую программу переключений секций БК. В зависимости от вида регулирования (одно- или многоступенчатое) используют один или несколько комплектов таких часов.
На рис. 41 приведена схема автоматической компенсации реактивной мощности в функции времени суток. Все три секции БК автоматически включаются в 8 ч, в 16 ч отключается первая секция, в 24 ч — вторая, а третья секция отключается только в выходные дни. Принцип работы этой схемы заключается в следующем.
Пусть в начале работы предприятия (в 8 ч) необходимо включить все секции БК. В этом случае замыкается контакт электрических часов ЭВЧС& и все три цепи катушек включения выключателей 1KB, 2КВ и ЗКВ с выдержкой времени через соответствующие реле времени 1РВВ, 2РВВ и ЗРВВ получают питание. В результате этого контакторами 1KB, 2КВ и ЗКВ соответственно включаются все три секции БК.
Для отключения первой секции замыкается контакт часов ЭВЧС16 и получает питание катушка реле времени отключения 1РВО. Контакт этого реле замыкает цепь катушки отключения выключателя 1 КО, в результате чего она отключается от сети. Аналогично в 24 ч отключается и вторая секция БК.
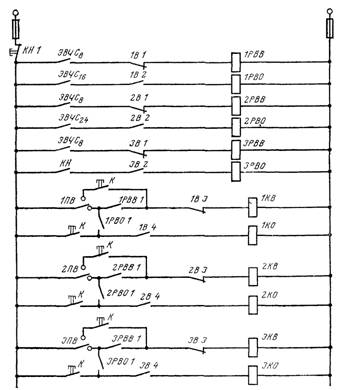
Рис. 41. Схема автоматического регулирования трех секций БК в функции времени суток
Третья секция БК по схеме отключается только в выходные дни специальными контактами часов —. так называемыми контактами недели (КН). Кроме того, размыкающим контактом часов КН.1 отключаются все три секции БК.
Достоинством данной схемы автоматического регулирования являются наиболее легкие условия работы переключающей аппаратуры, так как при регулировании в функции времени суток число включений и отключений секций БК
намного меньше по сравнению с таковым любой другой схемы автоматической компенсации реактивной мощности. Это обстоятельство повышает надежность элементов схемы управления в функции времени суток и увеличивает срок их службы, что является особенно важным для БК в установках выше 1000 В, в которых число переключений высоковольтной аппаратуры должно быть ограничено.
Представляется целесообразным для крупного предприятия, имеющего некоторое количество БК, установленных в различных местах предприятия и на различные напряжения его распределительной электросети, осуществить программное управление компенсацией РМ от централизованного автоматического устройства в функции времени суток. Такое регулирование при большом количестве КУ на предприятии позволит обеспечить эффективную и рациональную компенсацию реактивной мощности в соответствии с графиком и режимом работы электроустановок.
Автоматическое управление в функции напряжения.
Такой метод автоматической компенсации реактивной мощности и регулирования напряжения имеет ряд особенностей, в том числе: КУ не являются потребителем РМ и поэтому возможности регулирования напряжения в сторону снижения этой величины отсутствуют;
мощность КУ пропорциональна Квадрату напряжения и определяется следующими формулами, кВар для БК, соединенной в треугольник
![]()
(25)
для БК, соединенной в звезду (при той же емкости С мощностью БК в 3 раза уменьшается за счет снижения напряжения в v3 раз),
![]()
(26)
Из этих формул видно, что при снижении напряжения мощность КУ уменьшается пропорционально квадрату напряжения, хотя в этом случае желательно было бы иметь повышение мощности КУ;
при возрастании мощности КУ напряжение увеличивается, а снижение мощности КУ при том же потреблении реактивной энергии приводит к уменьшению напряжения;
эффект от регулирования мощности незначительного числа (одной или двух) КУ дает малый эффект изменения напряжения;
в ряде случаев условия работы КУ могут быть такие, когда уровень напряжения нельзя использовать как регулируемый параметр. Такая картина может иметь место в сети, когда КУ подключены вблизи центра питания трансформатора с регулированием под нагрузкой (РПН) при условии согласованного регулирования. В этом случае при возрастании нагрузки напряжение на шинах повышается, а при ее снижении уменьшается. Однако повышение уровня напряжения в схемах компенсации реактивной мощности является сигналом к отключению КУ, что в данном случае не удовлетворяет требованию режима максимальной нагрузки, который требует возможно большей компенсации реактивной мощности. Такая же противоречивая картина имеет место и в режиме минимальной нагрузки. Подобный эффект согласованного регулирования может отсутствовать только в точках электросети, удаленных от центра питания на значительное расстояние, где уже появляется реальная возможность регулирования КУ по уровню напряжения;
поскольку диапазон регулирования реактивной мощности в функции уровня напряжения недостаточно широк (т. е. данная функция регулирования недостаточно четкая), то обычно вводят дополнительные функции регулирования, т. е. коррекции, такие, например, как коррекция по углу между током и напряжением (такая, как в устройстве АРКОН) или коррекция по току нагрузки и т. д. Причем с приближением места подключения КУ к центру питания степень коррекции должна быть усилена.
Мощность источника РМ Qp, необходимую для повышения напряжения на величину (диапазон) dp, можно определить по следующей (формуле [13], кВар:
![]() (27)
(27)
где Хс — реактивное сопротивление сети от центрального пункта до пункта присоединения источника РМ.
В [13] справедливо подчеркивается, что для обеспечения экономичности работы электроустановок и повышения качества потребляемой электроэнергии общая мощность QKy должна состоять из мощности, необходимой для выполнения задания энергосистемы в часы максимума нагрузки, QKy1 и отдельно из мощности для регулирования напряжения QKУ2. Причем мощность QKy1 распределяется в электросетях предприятия из условия обеспечения минимума потерь электроэнергии (в этом случае особое внимание следует уделять компенсации реактивной мощности удаленных электроприемников), а мощность QKy2 целесообразно распределить между подстанциями с неоднородными нагрузками и неравномерными режимами напряжения.
Исследования влияния режима напряжений на степень компенсации реактивной мощности и величину приведенных расчетных суммарных затрат для различных электросетей, проведенные в МЭИ под руководством В. А. Веникова, показали, что изменение напряжения на 1 % приводит к изменению расчетных приведенных затрат в среднем на 1,7 % и степени компенсации реактивной мощности на 2,2 %.
Рис. 42. Схема автоматической компенсации реактивной мощности в функции напряжения

При изменениях нагрузки в промышленных электросетях уровень напряжения не остается постоянным: в часы минимальных нагрузок его действующее значение возрастает, а в часы пика нагрузок снижается. Это обстоятельство дает возможность осуществить автоматическую ступенчатую компенсацию реактивной мощности в функции напряжения.
На рис. 42 представлен один из вариантов схем компенсации реактивной мощности в функции напряжения с использованием двух реле напряжения и реле времени. Принцип работы этой схемы заключается в следующем.
В часы минимальных нагрузок предприятия и соответствующего возрастания напряжения в сети срабатывает реле максимального напряжения реактивной мощности Н. Контакты этого реле РМН.1 включают цепь катушки реле времени 1РВ, контакты которого 1РВ.1 с выдержкой времени (для отстройки от кратковременного изменения напряжения) отключают линейный контактор Л, что приводит к отключению секции БК от сети Если же напряжение в сети понижается, что может иметь место в часы полных нагрузок
предприятия, то срабатывает реле минимального напряжения РН, которое контактами РН.1 включает реле времени 2РВ. Замыкающие контакты этого реле 2РВ.1 с выдержкой времени включают линейный контактор Л, в результате чего секция БК подключается к сети.
Настоящая схема автоматического управления может использоваться также и для регулирования напряжения в сети, так как при включении БК напряжение повышается. Поскольку конденсаторы являются только источниками РМ, то при их отключении напряжение может не снизиться, так как снижение напряжения непосредственно зависит от повышения мощности электроприемников. Поэтому конденсаторные установки целесообразно использовать только для регулирования уровня напряжения в сторону его повышения.

Рис 43. Схема автоматического регулирования БК по уровню напряжения с применением логических элементов серии «Т»
На Свердловском заводе железобетонных конструкций имени Ленинского Комсомола внедрена схема автоматического включения и отключения линий с КУ по уровню напряжения цеховой сети с применением логических элементов серии «Т».
Принцип действия этой схемы, изображенной на рис. 43, заключается в следующем.
Отрицательное напряжение с диодного моста В4, изменяющегося пропорционально напряжению сети, подается на элемент Т202, который обладает релейной характеристикой и служит для преобразования входного напряжения в дискретный сигнал установленного уровня. Переменный резистор R4 обеспечивает широкие пределы напряжения срабатывания элемента Т202. Коэффициент возврата элемента регулируется в пределах 0,85—0,99 потенциометром R5. Стабилитрон Д4 установлен на входе элемента для увеличения коэффициента возврата. При достижении на выходе моста напряжения, равного напряжению срабатывания элемента Т202, последний выдает логический сигнал 1, поступающий на элемент Т304, который осуществляет временную задержку, необходимую для отстройки от кратковременных пиков напряжения продолжительностью не более 1,5 мин.
При напряжении сети, превышающем необходимое заданное значение, в течение продолжительного времени логический сигнал 1 направляется на вход усилителя Т403, который подает напряжение на катушку реле Р (типа РЭС 55) с магнитоуправляемым контактом КЭМ-3, размыкающим цепь управляющих электродов тиристорных контакторов. Тиристоры закрываются, отключая линию с КУ.
Применение данной схемы на логических элементах значительно снизило эксплуатационные издержки и повысило эффективность работы КУ.
Выше были рассмотрены схемы одно- и многоступенчатого автоматического регулирования реактивной мощности в различных функциях. Несмотря на простоту и меньшие затраты при одноступенчатой автоматической компенсации реактивной мощности, многоступенчатая компенсация позволяет расширить пределы регулирования и более плавно управлять реактивной мощностью в промышленных электросетях.
Выбор того или иного способа автоматического регулирования реактивной мощности, функции (параметра) регулирования и схемы автоматического управления помимо экономических соображений определяется различными факторами, в том числе исходным заданием энергосистемы по режимам работы КУ в сетях потребителя, характером изменения суточных графиков реактивных нагрузок в зависимости от специфики технологических процессов (могут иметь место медленные изменения среднего уровня суточной суммарной РМ, быстрые изменения нагрузки, резкопеременные толчковые нагрузки и т. д.); возможностью приобретения необходимого оборудования для обеспечения работы системы автоматического управления и в ряде случаев уровнем квалификации электротехнического персонала данного предприятия.
Так, если суточный график нагрузки предприятия имеет стабильный характер и требуется простая и надежная схема автоматического управления реактивной мощности, то целесообразно применить регулирование в функции времени суток с использованием часов типа ЭВЧС-24, включенных по схеме рис. 41.
Для осуществления комбинированного регулирования реактивной мощности и напряжения в сети могут быть использованы упрощенные автоматические регуляторы в функции уровня напряжения, включенные, например, по схемам рис. 42, 43, АРКОН и т. п. Если же требуется установить жесткий контроль за недопустимостью режимов перекомпенсации, удобны схемы автоматического регулирования в функции характера реактивной нагрузки (индуктивная или емкостная), приведенные на рис. 34—40. Удобной функцией автоматического регулирования является ток нагрузки, а реализация такого способа регулирования эффективно обеспечивает простая и надежная схема с применением бесконтактных элементов (см. рис. 31—33). В качестве непосредственного датчика для автоматического регулирования реактивной мощности удобно использовать фазометр, т. е. управлять в функции cos φ по схемам рис. 27—29.
При наличии быстрых и резкопеременных толчковых нагрузок становится перспективным применение статических компенсаторов РМ, обеспечивающих практически возможность безынерционного регулирования реактивной мощности. При этом улучшаются условия статической устойчивости энергосистемы в целом, что обеспечивает дополнительную экономию за счет повышения технико-экономических показателей работы электроустановок.