Ферстер Г. Г.
Электрооборудование и электроснабжение установок гидромеханизации. Учебник для техникумов. Изд. 2-е, перераб. и доп. М., «Энергия», 1977.
Книга представляет собой учебник для техникумов, составленный применительно к программам курсов «Электрооборудование и электроснабжение установок гидромеханизации», «Электропривод установок гидромеханизации» и «Автоматическое управление установками гидромеханизации».
В книге рассмотрены вопросы теории и эксплуатации электрических машин, аппаратов и приборов, применяемых на установках гидромеханизации. Книга содержит изложение основ теории электропривода, схемы ручного и автоматического управления электроприводами установок гидромеханизации с учетом их особенностей.
Отдельная часть книги посвящена вопросам электроснабжения.
Книга дополнена характеристиками и сведениями об эксплуатации новых электрических машин, применяемых на установках гидромеханизации.
Первое издание книги вышло в 1970 г.
Книга может быть использована инженерно-техническими работниками. занимающимися проектированием и эксплуатацией электрических установок гидромеханизации и технического флота.
Книга представляет собой второе, существенно переработанное издание учебника «Электрическое оборудование и электроснабжение установок гидромеханизации», вышедшего в 1970 г.
В настоящем издании изменена общая структура книги по принципу группирования однородных тем. В частности, элементы электротехнических устройств рассматриваются в первом разделе книги, поскольку они находят применение в установках, описываемых в различных частях учебника.
Помимо изменения структуры настоящее издание в отличие от первого дополнено новым материалом: техническими характеристиками электрических машин, применяемых в гидромеханизации, сведениями об эксплуатации электроустановок, защитных мерах безопасности, режимах потребления электроэнергии и др. Глава, посвященная релейной защите, дополнена числовым примером расчета ступенчатой защиты электросети.
Во втором издании книги отражены значительные изменения в номенклатуре изделий электротехнической промышленности, а также новые системы управления электроприводом, разработанные и внедренные в производство за последние годы.
В соответствии с требованиями ГОСТ в теоретической части учебника все величины приводятся в системе СИ. В примерах решения практических задач выполнен необходимый пересчет с приведением к системе СИ параметров и технических данных, которые до сего времени даются каталогами во внесистемных единицах и единицах системы МКГСС.
Использованы также рекомендуемые ГОСТ техническая терминология, обозначения единиц измерения и условные обозначения элементов электрических схем.
Книга рассчитана на подготовленность учащихся по соответствующим разделам физики и математики в объеме средней школы, а также по общей электротехнике и электрическим машинам в пределах программы техникума.
В перечне литературы приводятся книги, которые могут быть полезны для получения дополнительных сведений и более углубленной проработки отдельных вопросов.
Автор выражает глубокую благодарность научному редактору книги канд. техн. наук В. Й. Грасевичу и рецензенту — преподавателю Запорожского гидроэнергетического техникума Н. И. Сниткину за большую работу, проделанную ими при подготовке рукописи к изданию.
Гидромеханизация — отрасль производства, осуществляемого особыми механизмами с применением воды. В этой отрасли используется в том или ином виде энергия движущейся массы воды — ее потока,
В современной практике понятие «гидромеханизация» включает в себя совокупность технических средств разрушения твердых пород в местах их залегания, транспортирования и укладки их на новом месте с помощью потока воды.
В зависимости от решаемой задачи и программы выполнения работ гидромеханизация используется комплексно, во всех трех перечисленных ее функциях, либо в некоторых из них.
Гидромеханизация широко применяется на земляных работах в строительстве: при разработке котлованов и каналов различного назначения, возведении дамб, плотин и других насыпей, на добыче инертных материалов. В горнорудном производстве средствами гидромеханизации осуществляются так называемые вскрышные работы — съем грунта, покрывающего залежи рудных пород, и транспортирование его на сторону — в отвалы; гидравлический транспорт угля и торфа. На водном транспорте гидромеханизация используется для дноуглубления. Кроме перечисленного гидромеханизация выполняет еще ряд попутных и вспомогательных функций: промывку и классификацию геологических пород, уплотнение грунта в возводимых земляных сооружениях и пр.
Гидромеханизация представляет собой сложную совокупность различных машин, действие которых связано с использованием и преобразованием энергии. В настоящей книге рассматриваются электрические установки гидромеханизации.
Электроэнергетический комплекс гидромеханизации состоит из следующих основных частей: электродвигателей, средств управления двигателями и систем снабжения установок электроэнергией.
Существуют разные виды производства гидромеханизированных работ в зависимости от способа разработки грунта. По этому признаку различают две важнейшие технологические схемы гидромеханизации: гидромониторно-землесосные работы и разработка плавучими землесосными снарядами надводных (сухих) либо подводных забоев.
Гидромониторно-землесосный комплекс (рис. В-1) работает следующим образом. Вода под высоким давлением от специальной насосной станции (на рисунке не показана) подается к гидромонитору 1, назначение которого — образование мощной струи, выбрасываемой с большой скоростью. Струю направляют на грунт, подлежащий разработке в забое.

Рис. В-1. Схема производства гидромониторно-землесосных работ.
Размытый грунт в смеси с водой (так называемая гидросмесь, или пульпа) стекает в специальное углубление — зумпф 2, откуда откачивается центробежным грунтовым насосом 3 и под давлением, создаваемым этим насосом, транспортируется по трубе 4 — пульпопроводу к месту его укладки. Здесь твердый материал осаждается, образуя насыпь того или иного назначения, а вода в осветленном состоянии сбрасывается. По мере выработки грунта в забое гидромонитор переставляют, продвигая его вперед в направлении разработки.
Для производительной работы комплекса необходимо управлять струей гидромонитора, поворачивая его ствол в горизонтальной и вертикальной плоскостях. Кроме того, для поддержания необходимого содержания грунта в пульпе регулируют глубину погружения всасывающей трубы 5 в зумпф. Те и другие движения выполняются при помощи особых механизмов с электродвигателями. В целях удаления оператора на безопасное расстояние предусматривается дистанционное управление гидромонитором.
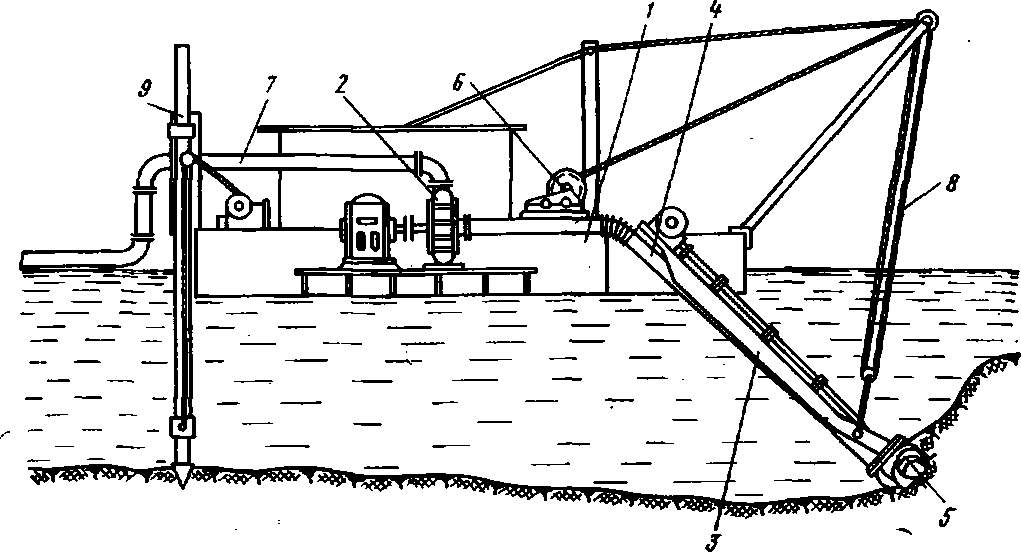
Рис. В-2. Плавучий землесосный снаряд.
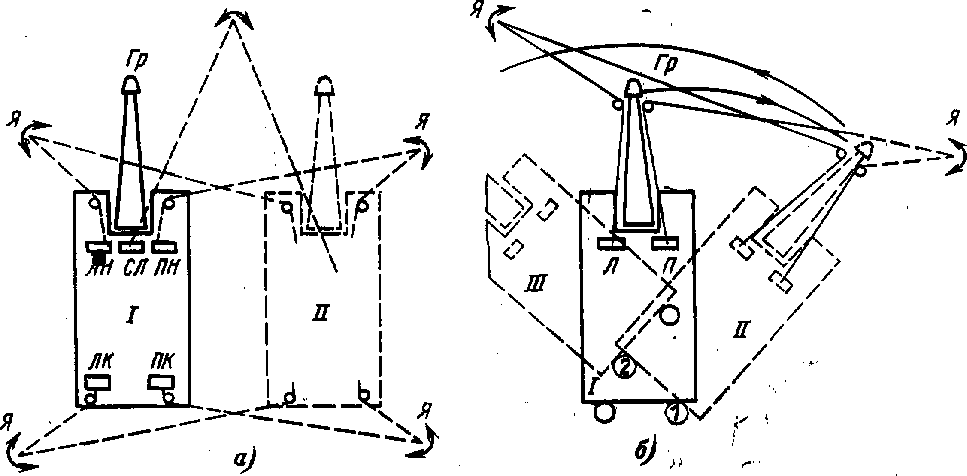
Рис. В-3. Папильонирование плавучего землесосного снаряда.
а — тросовое папильонирование; б — свайно-тросовое папильонирование; ЛН, ПН — Лебедев левого и правого папильонирования, носовые; ЛК. ПК, — лебедки левого и правого папильонирования, кормовые; Л, П — лебедки левая и правая; СЛ — становая лебедка; Я —тросовый якорь; Гр- грунтозаборное устройство; I, II, III — положения корпуса землесосного снаряде.
Плавучий землесосный снаряд (рис. В-2) представляет собой металлический корпус 1, на котором установлен грунтовой насос с двигателем 2. На передней части корпуса шарнирно укреплена рама 3, которая может поворачиваться в вертикальной плоскости. Вдоль рамы проложена всасывающая труба 4, присоединенная к грунтовому насосу 2. На конце рамы, погружаемом в воду, помещается вращающийся рыхлитель 5, представляющий собой фрезу особой формы. Глубина погружения фрезы устанавливается двигателем 6 с тросовым полиспастом 8.
Подводный грунт разрабатывается фрезой рыхлителя, в размельченном виде в смеси с водой всасывается грунтовым насосом и транспортируется под напором в трубе 7 к месту его укладки.
По мере разработки грунта положение земснаряда приходится изменять для перехода от выработанных участков забоя к невыработанным. Перемещение землесосных снарядов, называемое папильонированием1, осуществляется особыми папильонажными лебедками 6, установленными на корпусе снаряда, и выполняется несколькими способами.
Для фиксации корпуса землесосного снаряда и поворота его при свайном папильонирования служит особый механизм 9 со сваями, опускающимися с помощью лебедок на грунт. Это устройство называется механизмом свайного хода.
На рис. В-3 показаны два способа папильонирования: тросовый и свайно-тросовый.
Лебедки устанавливаются по обе стороны продольной оси снаряда и выполняют лево- и правостороннее рабочие движения соответственно.
1 От французского слова papillon (бабочка). Движение земснаряда сравнивается с перемещением бабочки.
Трос, перекинутый от барабана каждой лебедки через отводной блок и закрепленный на якоре, одни из лебедок выбирают, другие —одновременно ослабляют. Якори закладываются в грунте на определенном расстоянии от снаряда.
Тросовое папильонирование (рис. В-3,а) перемещает корпус снаряда параллельно самому себе. Продвижение вперед производится при помощи становой лебедки. Землесосные снаряды, работающие на тросовом папильонировании, механизма свайного хода не имеют.
Свайно-тросовое папильонирование производится поворотом корпуса снаряда относительно сваи, опущенной в грунт, как около неподвижной оси (положение свай показано на рис. В-3,б кружками с цифрами). Две сваи снаряда попеременно опускаются в грунт. Поворачиваясь при этом относительно одной, а затем — другой сваи, землесосный снаряд, совершая дугообразные движения, одновременно перемещается вперед.
Помимо рассмотренных основных установок применяются также дополнительные средства гидромеханизации.
Напора, развиваемого грунтовым насосом основной установки (грунтонасосной установки, или плавучего землесосного снаряда), часто бывает недостаточно для транспортирования пульпы на заданное расстояние. В таких случаях для повышения давления в трубах последовательно с основным грунтовым насосом устанавливаются так называемые перекачивающие (или бустерные) грунтовые насосы.
Точно так же при расположении насоса, подающего воду к гидромонитору на большом расстоянии от него, устанавливают дополнительные перекачивающие насосы для получения необходимой скорости струи, разрушающей грунт.
Количество последовательно работающих землесосных или насосных перекачивающих станций зависит от величины потери напора в транспортирующих трубопроводах.
В гидромеханизации применяются самые различные по производительности и напору грунтовые и водяные насосы, всевозможные лебедки, рыхлители землесосных снарядов и другие механизмы. Все они являются исполнительными механизмами.
Для приведения в действие исполнительных механизмов служат двигатели. Двигатель с системой управления им и передаточным устройством, непосредственно связанным с рабочим органом исполнительного механизма, называется приводом механизма.
Механизмы землесосных снарядов и других установок гидромеханизации приводятся в действие электродвигателями. Кроме электрических в гидромеханизации применяются также тепловые двигатели. В настоящей книге рассматриваются установки гидромеханизации, используемые в строительстве, которые в подавляющем большинстве случаев оборудованы электрическим приводом; они подключаются к внешним сетям электроснабжения.
Электрические двигатели имеют перед другими следующие преимущества:
- простота устройства и надежность в эксплуатации;
- широкий диапазон шкалы мощностей выпускаемых двигателей, что позволяет использовать их практически для любых механизмов;
- возможность управления на расстоянии (дистанционно);
- возможность регулирования скорости различными способами в широких диапазонах;
- большие возможности автоматизации управления.
Машины гидромеханизации различаются по режиму работы. Одни из них работают с переменной регулируемой скоростью, другие — с неизменной. Для некоторых механизмов характерны частые пуски и остановки, для других — длительная безостановочная работа. Для управления приводом используются современные средства автоматизации, обеспечивающие высокую производительность установок.
Большинство установок гидромеханизации питается электроэнергией напряжением 6000 Б. На этом напряжении работают двигатели приводов наиболее мощных механизмов: грунтовых насосов, крупных водяных насосов и некоторых рыхлителей. Лебедки оперативных механизмов, вспомогательные насосы и другие механизмы меньшей мощности на тех же установках оборудованы электродвигателями, работающими на напряжении 380 В. Для освещения, сигнализации, контроля и управления, в отопительных и других устройствах используется напряжение 220 В и ниже. Таким образом, для питания потребителей электроэнергии установок гидромеханизации требуется различное напряжение. Для получения необходимого напряжения служат понижающие трансформаторы, являющиеся принадлежностью землесосного снаряда, насосной станции и т. д.
Электроснабжение большинства установок гидромеханизации осуществляется трехфазными линиями электропередачи напряжением 35 и 6 кВ, значительной протяженности, с многочисленными трансформаторными подстанциями и устройствами распределения электроэнергии.
Гидромеханизация отличается большой мощностью своих установок. Так, например, суммарная мощность электрического привода механизмов землесосного снаряда средней производительности (300—400 м3 грунта в 1 ч) достигает 2400 кВт, а у наиболее крупных (1000 м3/ч) — до 5000 кВт. Это обстоятельство обусловливает особые требования к рациональному расходованию электроэнергии, поддержанию высокого коэффициента мощности и обеспечению безаварийной работы оборудования. Выполнение названных требований обеспечивается правильным выбором электрического оборудования, применением для повышения их производительности средств автоматического управления приводом механизмов, рациональным построением сетей электроснабжения и систем защиты от нарушений нормального режима работы.