Глава четвертая
АППАРАТЫ И ЭЛЕМЕНТЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
- 1. ДАТЧИКИ
Течение любого технологического процесса определяется множеством физических величин. Управление технологическим процессом и целенаправленное воздействие на него возможны лишь при наличии необходимой информации об этих величинах.
В электрических системах управления и регулирования информация о величинах, определяющих рабочий процесс, должна поступать в виде электрических сигналов.
Приборы, преобразующие какие-либо физические параметры в электрическую величину, называются датчиками.
Датчики являются источниками сигналов, подаваемых в цепи измерения, контроля, сигнализации, блокировки, управления и регулирования.
Датчики различаются по ряду основных признаков.
- По назначению. Разновидности по данному признаку определяются физической сущностью преобразуемой величины.
- По характеру вырабатываемых сигналов датчики подразделяются на две разновидности: а) датчики релейного типа, способные сигнализировать об ограниченном количестве состояний (крайних и промежуточных) контролируемого параметра, — датчики дискретного действия и б) датчики непрерывного действия, выдающие непрерывную информацию о состоянии или численном значении параметра.
- По принципу отбора вырабатываемого сигнала различают контактные и бесконтактные датчики. В большинстве случаев релейные датчики относятся к контактному виду, а непрерывные — к бесконтактному.
Число разновидностей датчиков весьма велико.
Здесь рассматривается ограниченное количество датчиков — как испытанных и укоренившихся в технологических процессах гидромеханизации, так и разрабатываемых приборов, представляющих интерес с точки зрения дальнейшего совершенствования гидромеханизированных работ.
Датчики температуры
Термометры сопротивления состоят из измерительного элемента и вторичного контрольного прибора. Измерительный элемент, представляющий собой проволочный резистор, помещают в контролируемую среду и подключают к чувствительной электрической мостовой схеме вторичного прибора. При нагревании элемента его сопротивление изменяется; при этом меняется показание прибора, фиксирующего текущую температуру.
Достоинством термометрического датчика сопротивления является малый размер элемента, что позволяет производить с его помощью измерения температуры в стесненных объемах.
Датчики сопротивления применяются, в частности, для измерения температуры нагрева обмоток электрических машин.
Термисторы — полупроводниковые элементы, обладающие значительным температурным коэффициентом сопротивления. Способ измерения температуры с помощью термистора, его особенности и область применения— те же, что и датчика сопротивления.
Термопары представляют собой элемент, образованный двумя разнородными проводниками, спаянными с одного конца. При нагреве места спая на других концах проводников возникает э. д. с., пропорциональная разности температур между спаем и ненагретыми концами проводников. Вторичными приборами служат чувствительные потенциометрические или мостовые приборы либо милливольтметр.
Рассмотренные датчики являются приборами непрерывного действия.
Термосигнализатор (манометрический термометр)—прибор для непрерывного визуального определения температуры по шкале и сигнализации о достижении ею заданного предельного значения. Действие термосигнализатора основано на повышении давления газа в замкнутом объеме при его нагревании.
Устройство состоит из баллона, манометрического прибора и соединяющей их гибкой трубки (рис. 4-1), образующих общую термосистему, наполненную газом. Для измерения температуры баллон помещают в контролируемую среду.
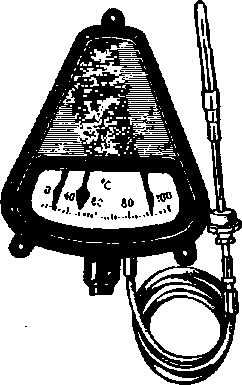
Рис. 4-1. Термосигнализатор типа ТС-100.
При изменении температуры меняется давление в термосистеме, которое регистрируется стрелкой манометрического прибора. С осью стрелки прибора связаны контактные щетки, скользящие по двум пластинам, каждая из которых связана с двумя указателями, окрашенными в разные цвета. Указатели устанавливаются от руки против какой-либо отметки шкалы, соответствующей задаваемому предельному значению температуры. При совпадении положений стрелки с одним из указателей происходит замыкание той либо другой пары контактов, обусловливая тем самым соответствующий сигнал.
Промышленность выпускает термосигнализаторы типа ТС-100 и ТС-200 с пределами шкалы до 100 и 200оС соответственно. В зависимости от условий установки длина трубки различна: от 1 до 12 м. Контактная система может работать при напряжении до 220 В; отключаемый ток — до 0,2 А. Разброс температур срабатывания контактов — до +8°С.
Недостатком прибора является большой размер баллона, в силу чего он не может быть использован для измерения температуры в узких объемах. В гидромеханизации термосигнализаторы широко применяются для контроля за температурой подшипников крупных двигателей.
Датчики давления
Технологические режимы насосов и транспортирования жидкости в трубах характеризуют следующие показатели давления:
а) избыточное давление, т. е. давление, превышающее атмосферное,— так называемое манометрическое давление;
б) давление, недостающее до атмосферного, — разрежение или вакуумметрическое давление;
в) разность давления в двух точках трубопровода.
Приборы и датчики, регистрирующие первые два вида давлений, носят наименование манометрических и вакуумметрических, соответственно.
Номинальные значения давления для манометрических датчиков лежат между нулем и верхним пределом, определяемым конструкцией прибора1. Шкала вакуумметрических датчиков определяется пределами: —l-:-0 кгс/см2 (0,1—0 МПа). Конструкции манометрических и вакуумметрических датчиков принципиально одинаковы.
Датчиками разности давлений служат дифференциальные манометры.
Электроконтактный манометр (или вакуумметр) работает по принципу обычного манометра; его основой является, манометрическая трубчатая пружина, связанная с указательной стрелкой; степень деформации пружины и показания стрелки определяются давлением во внутренней полости пружины.
Рис. 4-2. Электроконтактный манометр типа ЭКМ.
Помимо указательной стрелки прибор имеет две контактные контрольные стрелки, устанавливаемые от руки на заданные пределы давления. При соприкосновении указательной стрелки с контактной замыкается электрическая цепь и вырабатывается обусловленный сигнал.
Промышленность выпускает электроконтактные манометры типа ЭКМ (рис. 4-2) с верхним пределом от I до 1000 кгс/см2 (0,1 до 100 МПа) и вакуумметры — ЭКВ.
Контакты датчиков рассчитаны на напряжение до 380 В и отключающую мощность 10 В·А. В качестве датчика манометр представляет собой двухпозиционный прибор релейного типа. Область применения приборов ЭКМ и ЭКВ ограничена. В условиях пульсирующего давления возможны ложные срабатывания контактов.
Индукционный датчик давления аналогично прибору ЭКМ построен на принципе деформации манометрической пружины. К свободному концу пружины подвешен ферромагнитный магнитопровод дифференциального трансформатора. Перемещение магнитопровода вызывает изменение электрических параметров — напряжения и фазы — на выходе трансформатора. Появляющийся при этом сигнал передается в систему дистанционного измерения или автоматического регулирования.
1 Единица давления в системе СИ — Н/м2, называемая паскаль, Па; в системе МКГСС— кгс/см2 (1 кгс/см2=981х102 Па=0,0981 MПa≈0,l МПа).
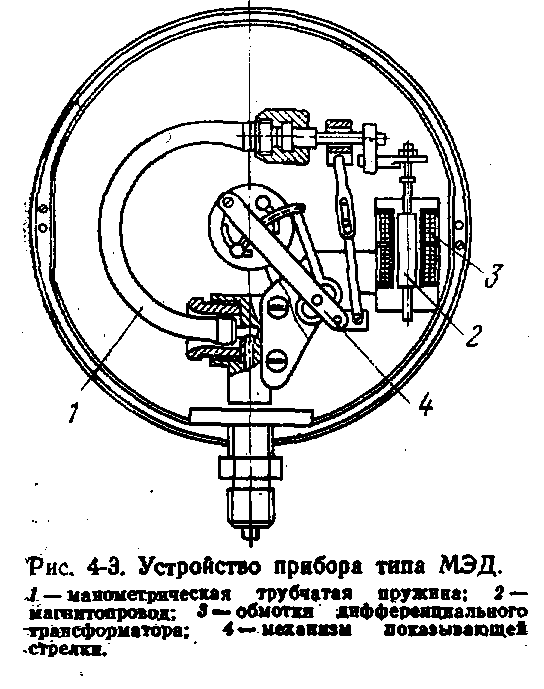
Выпускаемые промышленностью приборы типа МЭД (рис. 4-3) предназначены для измерения вакуума и давления. Они могут быть изготовлены со шкалой либо без нее. Бесшкальные приборы выпускаются на давление до 40 кгс/см2 (0,4 МПа), а с показывающей шкалой — на давление до 1600 кгс/см2 (160 МПа).
Приборы типа МЭД являются датчиками непрерывной информации; их погрешность ниже по сравнению с приборами ЭКМ.
Дифференциальные манометры используются в гидромеханизации обычно для измерения расхода воды и гидросмеси, а также относительного содержания в ней твердого вещества.
Существует множество конструкций дифманометра; одну из них — датчик, преобразующий разность давлений (перепад) в электрический сигнал, — представляет мембранный дифманометр типа ДМ (рис. 4-4).
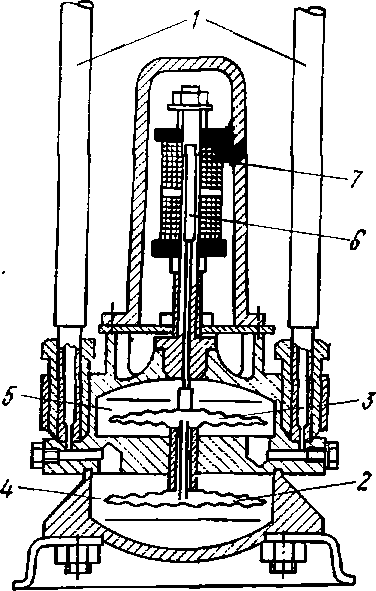
Рис. 4-4. Дифманометр типа ДМ. 1 — трубки отбора давления; 2, 3— нижняя и верхняя мембранные коробки; 4, 5 — нижняя и верхняя камеры давления: 6 — подвижный элемент магнитопровода; 7 —обмотки дифференциального трансформатора.
Чувствительным элементом дифманометра является блок двух гофрированных коробок, сообщающихся между собой и залитых дистиллированной водой. При подаче давления из двух точек отбора в нижнюю и верхнюю камеры вследствие разности давлений вода из одной мембранной коробки перетекает в другую, вызывая вертикальное перемещение магнитопровода. Такое перемещение приводит к изменению напряжения к фазы на выходе дифференциального трансформатора, используемого для измерений или регулирования.
Приборы выпускаются в широком диапазоне измеряемых величин, соответствующих верхнему пределу давления жидкости от 0,04 до 8 кгс/см2 (0,004 до 0,8 МПа) (модель 3564) и выше.
Датчики перемещения
Из большого числа существующих датчиков перемещения рассмотрим две разновидности: позиционные датчики релейного типа, к которым относятся конечные и путевые выключатели, датчики непрерывного действия, основанные на сельсинной связи, и индукционные.
Конечные выключатели представляют собой аппараты, служащие для автоматических переключений в системах управления при достижении подвижной частью механизма какого-либо предопределенного положения. Так, конечный выключатель используется для отключения подъемного механизма в крайних положениях, в частности, при ограничении подъема всасывающего устройства и свай землесосных снарядов.
В конечном выключателе (рис. 4-5) имеются группы замыкающих и размыкающих контактов, воздействие на которые осуществляется рычагом или нажимным штифтом. Контролируемая в своем движении часть механизма особым конструктивным упором нажимает на рычаг или штифт выключателя, вызывая замыкание или размыкание цепи.
Путевые выключатели выполняют более сложные переключения, в зависимости от положения движущегося элемента механизмов, и состоят из большого числа контактных групп. Примером путевого выключателя может служить вращающийся выключатель, на шпинделе которого установлен ряд кулачков, каждый из которых при повороте шпинделя на заданный угол размыкает или замыкает определенные контакты.
Сельсинный датчик перемещения работает в системе сельсинной синхронизирующей связи, состоящей из датчика и приемника (рис. 4-6).
Обмотки возбуждения (Вд, Вп) обоих сельсинов подключаются к питающему источнику переменного тока, а синхронизирующие обмотки (Сд, Сп) соединяются одна с другой (ср. § 1-6).
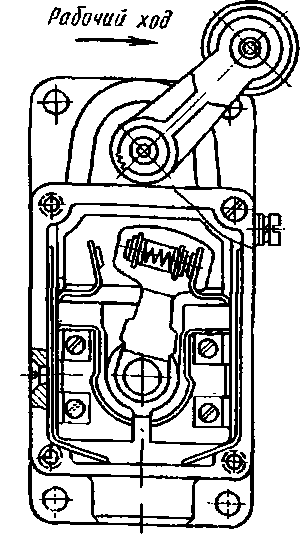
Рис. 4-5. Конечный выключатель серии ВК.
Если роторы двух одинаковых сельсинов — датчика и приемника — занимают одинаковое положение, обусловливая равное потокосцепление обеих обмоток, то э. д. с. в синхронизирующих обмотках равны и направлены встречно.
При этом уравнительные токи I1, I2 и I3 в соединительных проводах равны нулю. Поворот ротора сельсина-датчика на некоторый угол приведет к изменению прежнего потокосцепления с фазами синхронизирующей обмотки, равенство э. д. с. в сельсинах нарушится и в соединительных проводах возникнет уравнительный ток. Последний создаст вращающий момент на роторе сельсина-приемника, и тот повернется на такой же угол до уравновешивания э. д. с. обоих сельсинов.
Сельсинная система может служить датчиком непрерывного действия как углового, так и
прямолинейного перемещения. В последнем случае используются механические трансмиссии для преобразования одного рода движения в другой.
Системы сельсинной связи используются, например, для определения глубины погружения всасывающего устройства землесосных
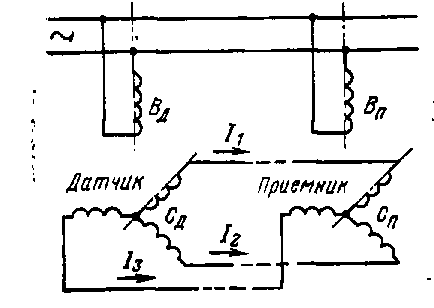
Рис. 4-6. Схема сельсинной связи.
снарядов. Сельсин-датчик укрепляется на поворотной раме всасывающего устройства; к его ротору подвешивается маятниковый груз, обеспечивающий постоянство положения ротора. Стрелка- указатель на валу сельсина-приемника указывает угол на шкале, проградуированной в метрах погружения.
Индуктивный датчик перемещения представляет собой электромагнит, питаемый переменным током с разомкнутым магнитопроводом (П-образным). С движущимся элементом механизма связана стальная пластина, замыкающая в определенном положении магнитную систему.
Магнитное сопротивление катушки при замыкании магнитопровода возрастает, а ток в катушке электромагнита уменьшается. Такое изменение тока используется в качестве импульса, подаваемого в систему управления.
Датчики механических нагрузок.
В гидромеханизации особенно важно предотвращение недопустимых механических напряжений в тросах, при помощи которых осуществляются рабочие перемещения землесосных снарядов. Кроме того, чаете бывает необходимо контролировать ослабление троса, сматываемого с барабана лебедок.
Датчик натяжения троса (рис. 4-7) действует по принципу динамометра. При натяжении троса равнодействующая растягивающих сил
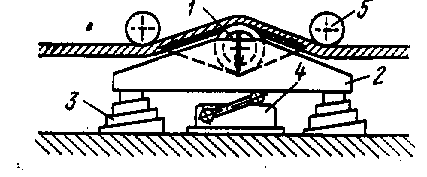
Рис. 4-7. Пружинный датчик натяжения троса.
1 — нажимной ролик; 2 — траверса; 3 — спиральные пружины; 4 — конечный выключатель; 5 — регулировочные ролики.
образует усилие нажатия на ролик, передаваемое траверсе, которая опирается на две спиральные пружины. В результате превышения установленного давления на ролик траверса опускается, поворачивая рычаг находящегося под ней конечного выключателя. При этом производится соответствующее переключение его контактов, введенных в схему управления двигателем тягового механизма.
Релейная система предельного момента используется в приводах лебедок, когда ток нагрузки двигателя пропорционален его вращающему моменту при постоянном магнитном потоке (асинхронные двигатели в пределах рабочей части характеристики, двигатели постоянного тока независимого возбуждения). В такой системе превышение нагрузки двигателя вызывает его отключение при заданном значении тока посредством реле.
Датчик ослабления троса в простейшем варианте представляет собой устройство, использующее провисание троса для механического воздействия на рычаг конечного выключателя.
Гироскопические датчики курса землесосного снаряда применяются при свайном папильонировании плавучих землесосных снарядов (рис. В-3,б). С помощью таких датчиков контролируется ширина прорези, разрабатываемой землесосным снарядом. Для выполнения этой функции необходимо иметь некоторое жестко фиксированное неизменное направление, по отношению к которому может быть ориентировано изменяющееся положение оси корпуса землесосного снаряда. В качестве такого фиксированного^ направления используется ось вращения гироскопа. Известно, что гироскопический эффект заключается в противодействии вращающейся массы изменению положения оси ее вращения. Мера этого противодействия зависит от массы и скорости вращения.
Гироскоп укрепляется на корпусе землесосного снаряда. При повороте последнего ось вращающегося элемента гироскопа и связанная с ним указательная стрелка, сохраняющие свое положение, поворачиваются относительно корпуса. При этом стрелка перемещается по шкале и в определенных заданных положениях замыкает соответствующие· контакты, вырабатывая электрический сигнал.
Контролируемый угол поворота может быть различным: он определяется положением контактов, устанавливаемых от руки, подобно приборам ТС и ЭКМ.
Датчики консистенции гидросмеси (пульпы)
Консистенция, или относительное содержание твердого вещества в гидросмеси, определяет производительность гидромеханизации и является поэтому важным технологическим показателем работы землесосных установок.
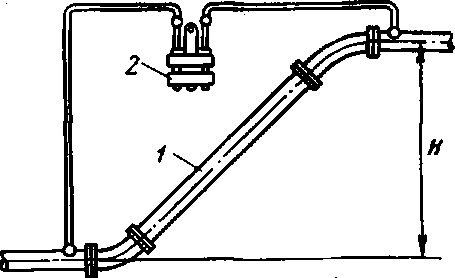
Рис. 4-8. Датчик консистенции на наклонном трубопроводе.
1 — наклонный участок трубопровода; 2— диаманометр.
В различное время предложено большое количество способов учета консистенции. Наиболее перспективно определение консистенции по перепаду давления на наклонной части пульпопровода и с помощью радиоизотопного датчика.
Консистенция и плотность гидросмеси —физически связанные параметры; рассматриваемые ниже приборы, являясь датчиками плотности, регистрируют консистенцию косвенным (расчетным) образом.
Консистометр на наклонном пульпопроводе разработан Институтом гидромеханики АН УССР (автор К. В. Диминский). Действие консистометра основано на зависимости перепада давлений в наклонной трубе от плотности протекающей по ней жидкости (рис. 4-8).
Такая зависимость приводит к равенству
![]()
где рг — плотность гидросмеси; ∆hг—перепад давлений; Н — высота наклонного участка (разность отметок) пульпопровода; рв — плотность воды.
Разность давлений непрерывно замеряется дифференциальным манометром, электрические сигналы которого направляются на показывающий прибор и в систему автоматического регулирования работы грунтонасосной установки.
В тех случаях, когда датчик используется для автоматического регулирования, важно, чтобы сигналы в любой момент времени отражали фактическую плотность в грунтозаборном устройстве. Тогда в качестве наклонного трубопровода используют участок всасывающей трубы грунтового насоса. При этом, поскольку последняя может иметь различный наклон, в систему вводится сельсинное корректирующее устройство для компенсации изменения высоты наклона Н.
Радиоизотопный консистометр использует эффект ослабления потока гамма-лучей, пронизывающего гидросмесь, в зависимости от содержания в ней твердого вещества (рис. 4-9,а).
Ядерные частицы, испускаемые источником, проходят пучком сквозь стенки пульпопровода и толщу движущейся в нем гидросмеси и попадают на счетчик, где энергия частиц преобразуется в электрический сигнал. Выработанный сигнал направляется далее через усилитель на показывающий прибор и в систему автоматического регулирования.
Ослабление пучка гамма-частиц в однородной среде характеризуется уравнением
![]()
где Y—интенсивность пучка, прошедшего через поглощающую среду; Yе—интенсивность излучения источника; е — основание натуральных логарифмов; μ — коэффициент поглощения; d — толщина слоя поглощающей среды.
В общем случае для пучка частиц с одинаковой энергией коэффициент поглощения зависит от плотности вещества: с увеличением плотности коэффициент поглощения возрастает. Из приведенного равенства следует, что энергия частиц, прошедших поглощающий слой и достигших счетчика при данной толщине слоя, с увеличением его падает по экспоненциальному закону.
В рассматриваемом случае коэффициент поглощения зависит от консистенции гидросмеси. Последняя, как известно, не является однородным веществом; однако, как показал опыт, точность метода радиоизотопных измерений оказывается для практики достаточной.
В качестве источника гамма-лучей применяют радиоактивные искусственные изотопы кобальта 60(Со60) или цезия 137(Cs137); активность последних значительно выше активности изотопа кобальта.
Блок источника (коллиматор) в промышленном изготовлении (рис. 4-9,б) выполнен в виде защитного свинцового контейнера в чугунной оболочке, внутри которого на подвижном штоке укреплен источник, например отрезок кобальто-никелевой проволоки. В нерабочем состоянии (при транспортировке или консервации) источник располагается под слоем свинца, как показано на рисунке, а отверстие закрывается свинцовой пробкой. Для получения направленного излучения шток оттягивают вниз, с тем, чтобы источник установился против отверстия.
Органом, воспринимающим излучение, служит счетчик Гейтер а, представляющий собой двухэлектродный прибор, заполненный разреженным газом (рис. 4-9,в). Частицы энергии, проникающие во внутреннее пространство счетчика, ионизируют молекулы газа, который становится электропроводящим. В цепи счетчика, содержащей источник э. д. с., возникает электрический ток, а на сопротивлении r—импульс напряжения, используемый для измерения или регулирования.
Согласно техническим нормам, защитный слой любых коллиматоров обеспечивает безопасность персонала на расстоянии 0,7 м и более. Для соблюдения условий безопасного производства работ необходима установка ограждений на расстоянии 1 м от всех элементов датчика (коллиматор, участок трубы, счетчик).
Монтаж и обслуживание радиоактивных датчиков требуют особой подготовки и тщательного соблюдения правил техники безопасности.
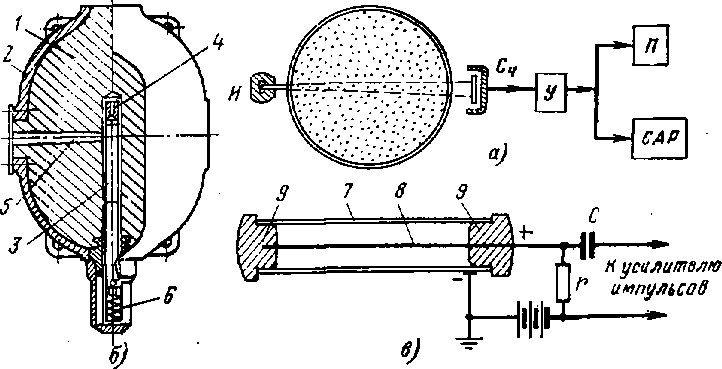
Рис. 4-9. Радиоизотопный датчик консистенции.
а- схема измерения; б —коллиматор; в —счетчик; 1 — свинцовый контейнер; 2 — чугунный корпус; 3 — подвижный шток; 4 — источник гамма-излучений; 5 —канал; 6 — пружина; 7 — металлическая трубка; 8 — нить; 9 — изоляторы,
Датчики расхода гидросмеси (расходомеры).
Расход или подача представляет собой объем гидросмеси, прошедшей в единицу времени через данное сечение транспортирующего пульпопровода.
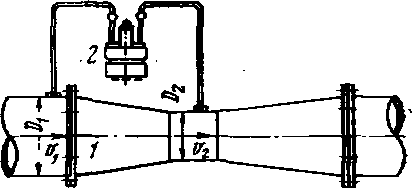
Рис. 4-10. Расходомер Вентури.
1 — труба Вентури; 2 — дифференциальный манометр.
Расход движущейся гидросмеси численно определяется как произведение средней по сечению трубы скорости потока на площадь поперечного сечения трубы
![]()
Рассматриваемые устройства по принципу действия являются датчиками скорости, косвенно реагирующими на величину расхода.
Датчик Вентури действует путем определения перепада давлений манометром на участке с искусственно повышенным гидравлическим сопротивлением, именуемом трубой Вентури (рис. 4-10).
![]()
Соотношение скоростей в полном и суженном сечениях трубы Вентури теоретически приводит к следующей зависимости расхода от перепада давлений:
где Q — расход (подача) гидросмеси; ∆hг—перепад давления; рг — плотность гидросмеси; k — коэффициент, зависящий от формы и геометрических соотношений трубы Вентури.
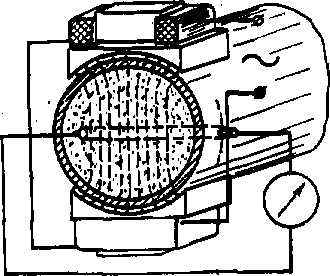
Рис. 4-11. Устройство индукционного датчика расхода.
Перепад давлений измеряется дифференциальным манометром, показания которого в виде электрических сигналов передаются на вторичный прибор и в систему автоматического управления.
Погрешность датчика обусловлена непостоянством плотности гидросмеси.
Индукционный датчик основан на измерении э. д. с., наведенной в проводнике, движущемся в магнитном поле. Э. д. с. пропорциональна скорости пересечения магнитных линий:
![]()
где Е — э. д. с.; В — магнитная индукция; l — длина проводника; v — составляющая скорости, перпендикулярная направлению магнитного поля.
Датчик представляет собой отрезок трубы из немагнитного материала, охваченный двумя полюсами электромагнита. Перпендикулярно к оси электромагнита в трубу встраиваются два электрода. Функцию движущегося проводника выполняет столбик гидросмеси между электродами (рис. 4-11),
Индукционные датчики считаются лучшими из известных датчиков расхода (расходомеров).
Прочие датчики
Помимо рассмотренных, в гидромеханизации могут быть использованы и другие вспомогательные датчики, подробное рассмотрение которых в настоящем курсе нецелесообразно. Некоторые из них поставляются промышленностью, другие могут быть изготовлены непосредственно на производстве.
Датчик уровня воды может быть выполнен в виде поплавка, который при колебаниях уровня воздействует на конечный выключатель, либо посредством сельсинной связи, когда уровень указывается на шкале прибора. Такие датчики применяются при автоматизации питающих либо откачивающих насосных станций.
Датчик контроля скорости — двухпозиционный прибор индукционного действия. Он состоит из вращающегося (от контролируемого механизма) магнита постоянного тока, охваченного статором — полым цилиндром, выполненным в виде «беличьего колеса», подобного роторной обмотке короткозамкнутого асинхронного двигателя. Токи, наводимые при этом в стержнях «беличьего колеса», взаимодействуют с потоком вращающегося магнита. При этом образуется момент, стремящийся повернуть статор прибора. По достижении определенной скорости значение момента оказывается достаточным для поворота статора на такой угол, когда замыкаются соответствующие контакты прибора.
Струйное реле служит для подачи электрического сигнала при отсутствии контролируемого движения жидкости в трубах. Конструкция прибора может быть различной. Датчики применяются для контроля подачи масла при принудительной смазке подшипников и в других целях.
Датчик водотечности представляет собой пару параллельно расположенных электродов в цепи сигнализации. Вода при своем появлении, замыкает цепь.
Датчики применяются для сигнализации появления воды в корпусе плавучих средств гидромеханизации.