Ниже рассматриваются некоторые схемы и принципы управления двигателями постоянного тока с регулированием путем изменения напряжения на якоре и ослабления магнитного потока возбуждения двигателя.
Управление двигателями в системе
Г—Д с вращающимся возбудителем
В качестве примера приводится схема управления реверсивным двигателем (рис. 9-5) с регулированием в глубоком диапазоне скоростей.
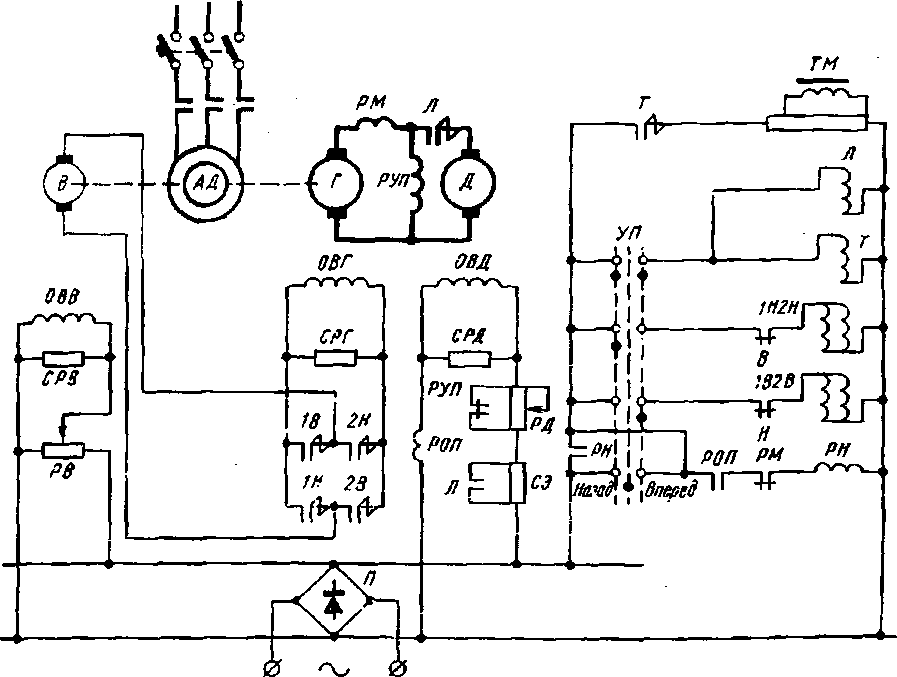
Рис. 9-5. Схема управления двигателем постоянного тока в системе Г—Д с регулированием возбуждения возбудителя.
Асинхронный двигатель АД с короткозамкнутым ротором вращает с неизменной скоростью генератор Г и возбудитель В одновременно (схема управления асинхронным двигателем на рисунке не показана). Якорь возбудителя подключен к обмотке возбуждения генератора через реверсивные контакторы 1В; 2В; 1Н; 2Н, переключением которых осуществляется изменение полярности на обмотке возбуждения генератора, а следовательно, и на щетках якоря генератора. Изменение полярности напряжения, подаваемого от генератора на якорь двигателя, влечет за собой его реверсирование.
Регулирование скорости двигателя осуществляется двумя способами: изменением напряжения, подаваемого на якорь двигателя, и ослаблением магнитного потока возбуждения двигателя.
Для регулирования напряжения используется потенциометр РВ в цепи обмотки возбуждения возбудителя ОВВ. Изменение напряжения на этой обмотке влечет за собой увеличение или уменьшение тока возбуждения генератора, а следовательно, и э. д. с., наводимой потоком возбуждения.
Регулирование в цепи возбуждения возбудителя оправдано соображениями минимальной потери энергии при регулировании. Ток возбуждения машин постоянного тока средней мощности составляет около 5% номинального тока главной цепи, поэтому регулирование в цепи возбуждения генератора было бы менее экономичным и требовало бы использования аппаратов большего габарита.
Обмотки возбуждения возбудителя и двигателя питаются независимо через выпрямитель П.
Пуск, остановка и реверсирование двигателя производятся универсальным переключателем УП, имеющим три положения. В положении 0 осуществляется нулевая блокировка схемы. При исчезновении напряжения на зажимах схемы управления замыкающие контакты реле PH отключаются, разрывая цепь катушек контакторов возбуждения генератора; последующее приведение двигателя привода Д во вращение возможно лишь после возврата переключателя в положение 0. При повороте рукоятки переключателя УП в положение Вперед или Назад включаются контакторы 1B, 2В или 1Н, 2Н, определяющие полярность напряжения на обмотке возбуждения генератора, а следовательно, направление вращения двигателя. Одновременно включается линейный контактор Л, замыкающий свои контакты в главной цепи Г—Д. и контакты, шунтирующие экономическое сопротивление СЭ в цепи обмотки возбуждения двигателя. Сопротивление СЭ введено в схему во избежание перегрева обмотки возбуждения при неподвижном невентилируемом двигателе.
Для получения повышенной скорости двигателя пользуются ослаблением магнитного потока возбуждения, регулируемого реостатом РД. Реле РУП настроено на напряжение срабатывания, близкое к номинальному напряжению двигателя; поэтому контакты РУП, шунтирующие сопротивление РД, размыкаются лишь тогда, когда скорость двигателя возрастает до значения, максимально возможного при регулировании напряжением. Этим достигается наиболее полное использование семейства регулировочных характеристик системы.
Для торможения в системе применен механический тормоз, освобождаемый электромагнитом ТМ. Тормозной магнит включается в обоих рабочих положениях рукоятки переключателя УП.
Контроль за цепью возбуждения двигателя осуществляется посредством реле обрыва поля РОП, при отключении которого его замыкающим контактом прерывается цепь питания катушки реле напряжения PH, обеспечивающего подачу напряжения на цепи управления.
Система Г—Д с регулированием возбуждения генератора при помощи магнитного усилителя
Рассматриваемая система предусматривает регулирование вращения двигателя в глубоком диапазоне скоростей; она предназначена для привода папильонажных лебедок плавучих землесосных снарядов. Как известно (см. введение), при папильонировании одновременно работают две лебедки: с помощью одной осуществляется натяжение, а другой — ослабление троса.
Схема рис. 9-6 объединяет два одинаковых, равнозначащих привода в общей симметричной системе управления.
В принятых ниже обозначениях двигателей и аппаратов буква Л определяет принадлежность элемента системы к приводу левой лебедки, а П — к правой. Общая для обеих частей схемы буква П обозначает принадлежность к механизму папильонирования. Двигатели привода лебедок: левой — ДЛП и правой— ДПП работают одновременно, вращаясь в разных направлениях. Регулирование скорости двигателей осуществляется изменением напряжения на якорях генераторов ГЛП и ГПП. Генераторы вращаются от одного асинхронного двигателя АД с постоянной скоростью, без изменения направления вращения. Для сочленения с генераторами двигатель должен иметь два свободных конца вала; соединение валов двигателя и обоих генераторов выполняется жесткой муфтой.

Рис. 9-6. Система Г-Д управления приводом папильонажных лебедок плавучих землесосных снарядов.
Пуск и остановка двигателя производятся включением или отключением трехполюсного контактора ДАД; схема управления двигателем, выполняется по типу схемы рис. 9-9.
Для питания обмоток возбуждения генераторов и двигателей постоянного тока используется выпрямленное напряжение сети.
Обмотки возбуждения двигателей подключены к общему выпрямителю В1. Выпрямитель В2 служит для питания постоянным током обмоток управления ОУЛ и ОУП и обмоток смещения ОСМ-Л и ОСМ-П магнитных усилителей МУ-Л и МУ-П, предназначенных для усиления управляющих сигналов малой мощности. Выпрямитель В-1, присоединяемый к обмоткам возбуждения двигателей ОВДЛП и ОВДПП, включен на полное напряжение 220 В переменного тока. Выпрямитель В-2, на выходе которого достаточно иметь напряжение 25—30 В, подключается к сети через автотрансформатор АТ.
При описании действия системы регулирования достаточно рассмотреть часть общей схемы, относящуюся к одному из приводов, так как управление обоими двигателями идентично. Разберем схему управлений двигателем привода ДЛП левой папильонажной лебедки.
Как указано выше, изменение скорости двигателя достигается регулированием напряжения, подаваемого от генератора на якорь двигателя. Напряжение генератора определяется током, проходящим через обмотку возбуждения ОВГЛП. Непосредственное регулирование возбуждения потребовало бы применения относительно громоздких аппаратов. Во избежание этого в схеме используется однотактный магнитный усилитель МУ-Л с выходом на постоянном токе. Рабочая обмотка усилителя ОР-Л получает питание от сети напряжением 220 В с промышленной частотой 50 Гц. Обмотка возбуждения генератора подключается к выходу магнитного усилителя через выпрямительный мост В-Л.
Для изменения направления вращения двигателя привода необходимо изменить полярность напряжения на его якоре; последнее достигается изменением направления тока в обмотке возбуждения генератора с помощью реверсивных контакторов КРЛЛ (левое вращение двигателя) и КРЛП (правое вращение).
Для защиты обмоток возбуждения генератора и двигателя от перенапряжения в переходном процессе изменения тока параллельно с обмоткой включены разрядные сопротивления СРГЛП и СРДЛП.
В магнитном усилителе с целью повышения коэффициента усиления, что в свою очередь позволяет снизить мощность управляющих сигналов, применена положительная обратная связь по напряжению на выходе. Обратная связь осуществлена подключением обмотки ООС-Л параллельно с нагрузкой (обмоткой возбуждения генератора)1. Для уменьшения тока холостого хода магнитного усилителя в схему введено отрицательное смещение, сдвигающее характеристику усилителя в сторону положительных сигналов управления (рис. 4-31). Напряжение смещения подается на обмотку ОСМ-Л усилителя. Сопротивление CCM-Л позволяет установить минимальное значение тока холостого хода усилителя.
Регулирование напряжения на выходе магнитного усилителя, т. е. напряжения возбуждения генератора, производится изменением тока в обмотке управления ОУ-Л.
При регулировании ток управляющего сигнала зависит от положения скользящего контакта на потенциометре ПРР-Л. Этот потенциометр имеет два плеча, и в среднем положении скользящего контакта напряжение на управляющей обмотке равно нулю, что соответствует режиму холостого хода магнитного усилителя. В режиме холостого хода ток на выходе магнитного усилителя имеет наименьшее значение и возбуждение генератора близко к нулю; при этом двигатель привода лебедки не вращается.
Подвижный контакт потенциометра ПРР-Л жестко связан с двумя контактными мостиками, замыкающими цепи катушек контакторов реверса КРЛЛ и КРЛП на напряжение переменного тока 220 В. При перемещении подвижного контакта из среднего положения в ту или другую сторону одновременно замыкается цепь катушки одного из контакторов реверса. Такая конструкция регулятора обеспечивает в любом случае пуск двигателя при малом напряжении в главной цепи Г—Д и исключает возможные ошибки в действиях оператора.
Вместо потенциометров часто используются сельсинные регуляторы напряжения (см. § 2-4). Регуляторы устанавливаются на пульте управления землесосного снаряда в рубке оператора (багермейстера).
Система управления допускает независимые операции с обеими лебедками, что иногда необходимо при маневровых движениях землесосного снаряда, при смене тросов на лебедках, производстве наладочных работ и пр.
В случае необходимости увеличить скорость привода выше предела, допускаемого напряжением главных цепей Г—Д, прибегают к ослаблению магнитного поля возбуждения двигателя при помощи сопротивления СП-Л, включенного по потенциометрической схеме последовательно с обмоткой возбуждения ОВДЛП двигателя.
1 Коэффициент обратной связи можно изменять при помощи регулируемого сопротивления (на схеме не показано), включенного последовательно с обмоткой ООС-Л.
Для ограничения момента одного из двигателей при натяжении троса в систему вводятся датчики усилия (натяжения) троса ДНТ-Л и ДНТ-П (рис. 4-7).
Чрезмерное ослабление троса на другой лебедке также недопустимо с точки зрения фиксации положения плавучего снаряда на поверхности водоема. Кроме того, ослабленный трос может оказаться зацепленным вращающейся фрезой рыхлителя. Для ограничения такого ослабления в систему управления вводятся датчики ослабления троса ДОТ-Л и ДОТ-П. Контакты датчиков натяжения и ослабления тросов используются для сигнализации либо вводятся в систему автоматического управления земснарядом (см. § 10-7). На рис. 9-6 датчики ДНТ и ДОТ даны условно; их контакты в схеме не показаны.
Принцип регулирования скорости двигателя постоянного тока с дросселем насыщения
Источником напряжения в системах регулирования с дросселем насыщения является сеть трехфазного переменного тока (рис. 9-7).
На якорь двигателя через трехфазный выпрямитель В подается напряжение постоянного тока.
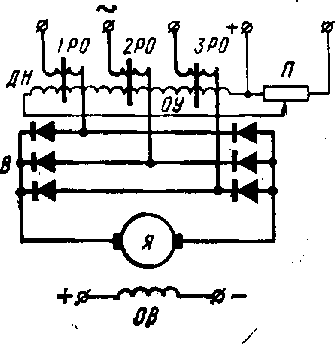
Рис. 9-7. Принцип управления двигателем постоянного тока независимого возбуждения с выпрямителем и дросселем насыщения.
Регулирование напряжения осуществляется потенциометром П путем изменения тока в цепи обмотки управления ОУ дросселя насыщения ДН, рабочие обмотки которого 1PO, 2РО и 3РО подключены к трехфазной сети напряжением 380 В. Реверсирование двигателей может быть осуществлено путем изменения направления тока в якоре или обмотке возбуждения ОВ двигателя.
Принцип дроссельного регулирования широко используется в системах с магнитными усилителями (МУ-Д). Благодаря наличию нескольких управляющих обмоток у магнитных усилителей в системах МУ-Д можно получить необходимые специальные механические характеристики привода (см. § 10-5).
Принцип тиристорного управления двигателем постоянного тока
Для управления двигателем в тиристорной системе используется схема регулируемого выпрямителя, например изображенная на рис. 4-20.
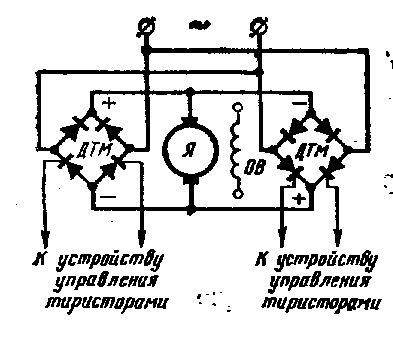
Рис. 9-8. Схема силовых цепей при тиристорном управлении двигателем постоянного тока.
Якорь двигателя подключается к выходу на постоянном токе диодно-тиристорного моста ДТМ. При этом регулирование скорости осуществляется изменением активного сопротивления PC в схеме управления тиристорами.
Реверсирование двигателя может быть осуществлено изменением направления тока в цепи якоря. В этом случае система состоит из двух мостовых схем (рис. 9-8), к выходным зажимам которых подключен якорь двигателя.
Направления прямой проводимости обоих мостов противоположны. Поэтому при работе любого из мостов другой заперт по отношению к току действующего моста и выпрямленный ток в любом случае проходит через обмотку якоря двигателя. При этом система блоков управления тиристорами обоих мостов должна быть построена так, чтобы одновременная подача отпирающих импульсов на оба моста исключалась.
Другим средством реверсирования является изменение направления тока в обмотке возбуждения ОВ. В этом случае для работы двигателя достаточна одна выпрямительная схема.