На современных отечественных буровых установках с индивидуальным электроприводом по системе тиристорный преобразователь — двигатель (ТП — Д) основных механизмов широкое распространение получили системы подчиненного управления, которые включают последовательное (каскадное) соединение контуров управления. При этом число каскадов управления равно числу управляемых величин (координат) электропривода, каждая из которых имеет собственный регулятор.
Функциональная схема двухконтурной системы подчиненного управления электроприводом постоянного тока изображена на рис. 1. Схема включает внешний (главный) контур регулирования скорости и подчиненный ему внутренний контур регулирования тока с соответствующими регуляторами скорости РС и тока РТ.
На вход регулятора тока от регулятора скорости подается сигнал задания тока £/зт, а от датчика тока ДТ — сигнал отрицательной обратной связи по току £/ос т, соответствующий фактическому значению тока якоря. В свою очередь на входе регулятора скорости суммируются сигналы заданной скорости изс, формируемый задатчиком скорости ЗС, и отрицательной обратной связи по скорости иос с, снимаемый с тахогенератора ТГ.
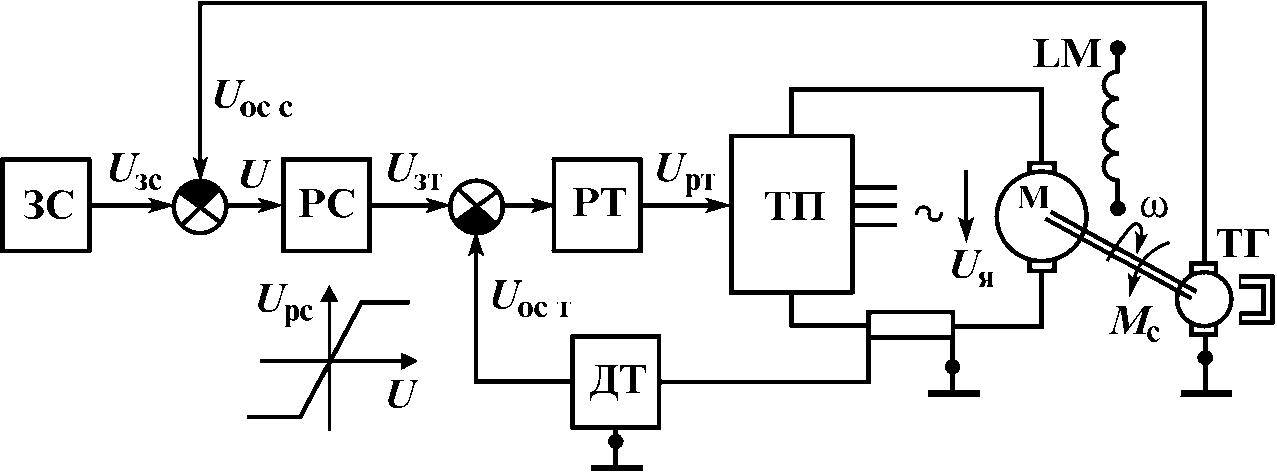
Рис. 1. Функциональная электрическая схема двухконтурной системы подчиненного управления электроприводом
Система подчиненного управления электроприводом перемещения исполнительного органа рабочей машины будет иметь три контура. К имеющимся двум вышеуказанным контурам добавится контур регулирования перемещения со своим регулятором. В системах подчиненного управления электроприводом выходной сигнал каждого предыдущего регулятора является задающим сигналом для последующего регулятора.
Системы подчиненного управления электроприводами по сравнению с ранее применяемыми системами, имеющими общий суммирующий усилитель, на входе которого суммируются задающий сигнал и сигналы обратных связей по скорости, напряжению, току и т.д., обладают рядом преимуществ. Отметим некоторые из них:
возможность построения самых разнообразных схем управления по агрегатному принципу, т.е. на основе небольшого числа стандартных элементов (ячеек, блоков и т.д.);
простота осуществления связи электропривода с бесконтактными логическими и вычислительными устройствами для управления сложными технологическими процессами;
малая мощность управления;
применение комплектных высоконадежных элементов, выпускаемых на основе современных технологий;
возможность реализации оптимальных законов управления каждой управляемой величины по отдельности и электроприводом в целом;
простота схем, обеспечивающих ограничения управляемых величин (тока, скорости и др.) на заданном уровне;
значительное снижение стоимости и сокращение сроков проектирования, монтажа и ввода в эксплуатацию электрооборудования и др.
В системах подчиненного управления задача регулирования координат электропривода возлагается на систему управления, использующую средства вычислительной техники и последние достижения электроники. В зависимости от использованной элементной базы системы управления могут выполняться аналоговыми, цифровыми и цифро-аналоговыми. В настоящее время в системах управления электроприводами основных механизмов отечественных буровых установок применяются аналоговые системы. Ведутся работы по созданию цифровых систем управления на базе микропроцессорной техники.
Системы управления, построенные из аналоговых элементов выполняются из функциональных блоков, решающих определенные задачи. Последние могут повторяться в различных по своему назначению электроприводах. В их номенклатуру входят: источники питания, задатчики входных сигналов, датчики управляемых величин (тока, напряжения и др.),
усилительные устройства, регуляторы, потенциальные разделители, компараторы, функциональные устройства, устройства защиты и коммутации, устройства технологической логики, контролирующие и вспомогательные устройства, т.е. функционально полный набор, обеспечивающий построение систем управления различной структуры.
Функционально-технической единицей, имеющей самостоятельный законченный конструктив, является ячейка. Это печатная плата с микросхемами, выполненная в виде выдвижной конструкции. Ячейка может выполнять какую-либо функцию, например, регулятора, датчика тока, задатчика интенсивности и др. Ячейки устанавливаются с помощью пазов в общем каркасе (кассете). Заполненная множеством ячеек кассета образует следующий конструктивный уровень-блок. Внутри блока ячейки соединяются между собой при помощи проводов и разъемов через имеющуюся в блоке объединяющую печатную плату (ячейку). Следующая конструктивная ступень — шкаф (закрытая конструкция) или стойка (открытая конструкция).
При создании модулей аналоговых систем управления электроприводами заложены определенные системотехнические принципы, позволяющие наиболее рационально решать задачи проектирования и эксплуатации электроприводов. Важнейшими из этих принципов являются совместимость модулей. При этом обеспечивается информационная совместимость (по физической природе и допустимым пределам изменения сигналов); энергетическая (по виду энергии для питания модулей); конструктивная (по присоединительным и габаритным размерам, а также по применяемым модулям); метрологическая (по допустимым погрешностям).
Возможность сопряжения отдельных модулей обеспечивается тем, что информация передается унифицированными непрерывными сигналами, ограниченными по уровню напряжением ±10 В.
С целью уменьшения числа разъемов и повышения надежности систем управления в настоящее время отмечается тенденция перехода к модернизированным ячейкам, реализующим сложные функции и заменяющим несколько ячеек, выполняющих простые функции. Например, такая ячейка может содержать: регулятор тока, регулятор скорости с узлом ограничения, узел выделения сигнала ЭДС двигателя, задатчик интенсивности разгона двигателя. Поскольку такие ячейки выполняют сложные функции, то их практически нельзя применять для других целей, чем те, для которых они предназначены, и они не являются универсальными. Эти ячейки используются только в общей части систем управления электроприводами всех исполнений, для реализации специфических функций необходимо применение совокупности ячеек, выполняющих простые функции.
Важной особенностью систем подчиненного управления электроприводами является возможность простыми средствами обеспечить оптимальное протекание процессов в контурах регулирования. Наибольшее распространение на практике получила настройка параметров регуляторов по техническому или симметричному оптимумам.