Применение дистанционной и автоматической зацепки и отцепки крюков стропов повышает эффективность управления крановым оборудованием и производительность труда такелажников и стропальщиков, обеспечивает безопасность производства стропальных работ. В простых устройствах этого типа крюк поворачивается при помощи рычага или канатика при ослабленном натяжении стропов.
Универсальное грузозахватное устройство с дистанционным управлением отцепкой крюков (рис. а) состоит из подвески, прикрепленных к ней через кольца обойм с блоками, ветвей стропов и уравнительных канатов. Стропы на свободных концах оборудованы грузовыми крюками с обоймами, перекрывающими зев крюка и снабженными тягами, которые осуществляют поворот крюка. Конструкция подвески позволяет воспринимать односторонние нагрузки за счет возможности ее поворота относительно крюка монтажного крана в вертикальной плоскости, а наличие колец обеспечивает поворот относительно вертикальной оси обоймы в пределах 120°. Грузоподъемность устройства 10т, масса 195 кг.
Грузозахватное устройство ЗСП-ЗА для строповки и дистанционной расстроповки строительных конструкций, технологического оборудования и других грузов (рис. б) состоит из обоймы, специального крюка, установленного в обойме на пальце рукоятки с фиксатором, пружины растяжения, распорной пружины, опирающейся на тарелки, и направляющего стержня с вилкой. На консоли рычага, жестко связанного с крюком, имеются отверстия для закрепления рычага. Один конец рукоятки, выполненный в виде вилки, охватывает рычаг, а другой кольцом соединяется с расстроповочным шнуром. Рукоять может поворачиваться на рычаге вокруг оси отверстия на 135°, при этом фиксатор, входя в зацепление с любым из четырех пазов на рычаге, надежно фиксирует ее положение. В верхней части грузозахватного устройства вставлен палец для соединения его со стропом грузоподъемного механизма.
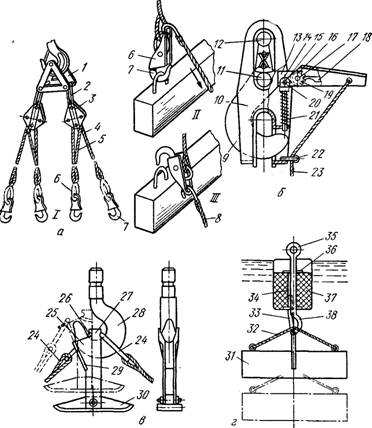
Строповые грузозахватные устройства с дистанционной отцепкой крюков:
а — универсальные; б — ЗСП-ЗА для строповки и дистанционной расстроповки; в — для автоматического освобождения крюка от петли грузового стропа; г — для автоматической остроповки груза при погружении в воду; 1 — общий вид; II — положение крюка при захвате груза; III — положение крюка при отстроповке груза; 1 — подвеска; 2 — обойма; 3 — блок; 4 — ветвь стропа; 5 — уравнительный канат; 6 — обойма крюка; 7 — грузовой крюк; в —тяга; 9 — крюк; 10 — обойма; /1 — палец рукоятки; 12 — палец; 13 — консоль рычага; 14 — вилка; 15 — отверстие для оси; 16 — рукоятка; 17 — отверстие для фиксатора; 18 — пружина растяжения; 19 — фиксатор; 20 — опорная тарелка; 21 — распорная пружина; 22 — скоба; 23 — расстроповочный шнур; 24 — накидные кольца; 25 — щека скобы; 26 — фигурная скоба; 27 — перемычка; 28 — крюк; 29 — наклонная пластина; 30 — пята: 31 — груз; 32 — ветвь стропа; 33 — рычаг; 34 — труба; 35 — рым; 36 — фланец; 37 — поплавок; 38 — стебель
Зев перекрывается рогом крюка и под действием пружины постоянно замкнут. Он раскрывается при повороте рукояти непосредственно рукой или натяжением расстроповочного шнура. Скоба на обойме обеспечивает оптимальный угол между расстроповочным шнуром и рукоятью при ее горизонтальном положении.
Груз стропят, непосредственно зацепляя крюком за монтажные петли, или при помощи дополнительных кольцевых стропов обвязкой «на удав». Перед подъемом груза рукоять устанавливают так, чтобы при дистанционном раскрытии грузозахватного устройства угол между натянутым расстроповочным шнуром и рукоятью достигал 90°. Когда соблюдение этого условия невозможно, рукоять устанавливают в горизонтальное положение, а расстроповочный шнур пропускают через скобу. Для изменения положения рукоятки ее оттягивают до выхода фиксатора из зацепления с пазом на рычаге крюка, устанавливают в требуемое положение и фиксируют.
Дистанционную расстроповку производят натяжением расстроповочного шнура после снятия нагрузки с крюка. Когда в дистанционной расстроповке нет необходимости, рукоять можно установить в крайнее нижнее положение.
Грузоподъемность грузозахватного приспособления 3 т, габаритные размеры 70X200X320 мм, масса 7,5 кг.
Устройство для автоматического освобождения крюка от одного концевого звена петли грузового стропа при снятии с него груза, монтируемое на стандартном однорогом крюке, состоит из двух фигурных скоб, соединенных в верхней части перемычкой (рис. в) . Щеки скоб выгнуты по форме рога крюка и соединены наклонной пластиной, по которой скользит крюк. Фигурные скобы, перемычка и пластины образуют обойму, которая в нижней части снабжена пятой. Скоба верхним концом перекрывает зев крюка, что исключает выпадение концевых звеньев стропа при рабочем положении. Щека скобы служит для сбрасывания звена стропа с крюка. Крюк освобождается от петли грузового стропа только при упоре пяты в груз. В этом случае крюк под действием силы тяжести скользит внутри обоймы, и звено стропа сбрасывается с крюка. Штриховыми линиями на рис. в показано взаимодействие деталей устройства в момент сбрасывания звена с крюка. Грузоподъемность устройства 5,1 т, масса 15,22 кг.
Разработано строповое устройство для автоматической расстроповки груза при погружении его в воду. Оно имеет крюк (рис. г), выполненный в виде стебля, и шарнирно соединенный с ним рычаг. Стебель снабжен рым-болтом. На стебель и рычаг свободно надет поплавок, обладающий плавучестью. Во внутреннем отверстии поплавка при помощи фланцев вмонтирована трубка. Стебель и рычаг связаны с грузом при помощи стропа.
Устройство работает следующим образом. Для закрепления груза на грузозахватном устройстве, связанном с судоремонтным подъемным средством рым-болтом, стропы заводят на плечо стебля крюка, поворачивают рычаг вверх до контакта со стеблем, после чего поплавок опускают по стеблю, что обеспечивает фиксирование рычага при помощи трубы в закрытом положении. Поднятый судовым грузоподъемным средством груз выносят за борт и опускают в воду. При погружении под воду поплавок в результате плавучести поднимается по стеблю и освобождает рычаг, который под действием стропов откидывается вниз и освобождает последний вместе с грузом.