Наибольшее преимущество перед рассмотренными механизмами имеют штырьево-строповые механизированные грузозахватные устройства с дистанционным управлением (электромагнитным и пневматическим приводами) расстроповкой из кабины крана. Они обеспечивают безопасность работ при монтаже и ускорение монтажных и строительных операций. Основные типы применяемых в настоящее время штырьево-строповых механизированных грузозахватных устройств показаны на рис. 1. Общая схема строповки груза показана на рис. 1, а.
Представленные на рис. 1, б, в грузозахватные устройства грузоподъемностью 10т идентичны и отличаются только приводом для вытягивания штыря. В конструкции, изображенной на рис. 1, б, привод рычажно-пневматический при давлении воздуха 0,3 МПа. В качестве пневмотолкателя использована тормозная камера автомобиля. Масса грузозахватного устройства 45 кг. В конструкции, показанной на рис. 1, в, привод рычажно-электрический при напряжении переменного тока 36 В. В качестве толкателя применен тормозной магнит типа КМТ-101, но можно использовать и любой другой магнит аналогичной характеристики. Масса грузозахватных устройств 55 кг. Грузозахватные устройства с безрычажным электромагнитным приводом (рис. 1, г) имеют грузоподъемность 20 т. Штырь постоянно замкнут пружиной.
Для его оттягивания используется непосредственно электромагнит, питаемый переменным или постоянным током.
Разработаны конструкции штырьево-строповых грузозахватных устройств с управлением при помощи тормозных электромагнитов. Основное отличие их от рассмотренных заключается в том, что при помощи грузозахватных устройств можно лучше направлять штырь, удлинив опорную втулку. Такие грузозахватные устройства предназначены для подъема, перемещения и монтажа металлических, сборных железобетонных конструкций массой до 16 т. В качестве привода для втягивания штыря применены электромагниты типа МИС, работающие на переменном токе напряжением 127 В.
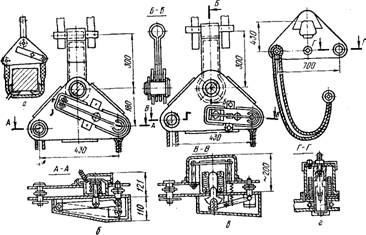
Рис. 1. Штырьево-строповые механизированные грузозахватные устройства с дистанционным управлением:
а — общая схема; б — с рычажно пневматическим приводом; в — с рычажным электромагнитным приводом; г — с безрычажным электромагнитным приводом
Грузозахватные устройства (рис. 2) состоят из корпуса, серьги, магнитного привода, рычага, рукоятки, запорного штыря, электрооснастки и одноветвевого стропа с коушами. Корпус — это сварная конструкция из листовой стали. Запорный штырь состоит из штыря, цилиндра и пружины.
При застропке груза стропом охватывается наружный элемент конструкции, и свободный конец стропа надевается на выдвижную часть штыря. В открытом состоянии штырь удерживается магнитом, в закрытом — пружиной.
Расстроповка конструкции осуществляется подвижным штырем механически при помощи магнитного привода посредством кнопочного управления из кабины крана или вручную рукояткой.
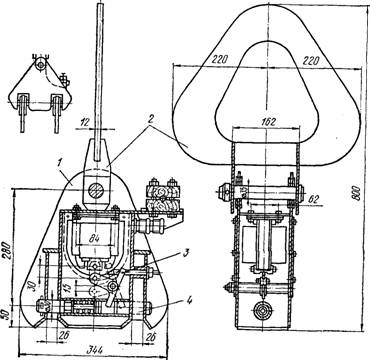
Рис. 2. Унифицированное штырьево-строповое грузозахватное устройство с дистанционным управлением (с рычажно-электромагнитным приводом) грузоподъемностью 4 т:
1 — корпус; 2 — серьги; 3 — рычаг; 4 — рукоятка
Все штырьево-строповые грузозахватные устройства с пневматическим и электромагнитным приводами управляются дистанционно крановщиком из кабины крана. Для предотвращения случайного включения в цепи катушки магнитного пускателя последовательно с кнопкой установлен выключатель, который необходимо включать непосредственно перед нажатием кнопки и после растроповки снова отключать. Третья жила питающего кабеля предназначена для заземления. Один конец ее должен быть подключен к корпусу грузозахватного устройства, другой — к металлическим конструкциям крана. При применении траверсы с двумя грузозахватными устройствами на ней устанавливают клеммный ящик, к которому присоединяют кабель от обоих устройств.