Глава 3
ВЕНТИЛЬНЫЕ КАСКАДНЫЕ ЭЛЕКТРОПРИВОДЫ
§ 3.1. ПРИНЦИП ПОСТРОЕНИЯ И МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ВЕНТИЛЬНЫХ КАСКАДНЫХ ЭЛЕКТРОПРИВОДОВ
Под вентильным каскадным электроприводом понимается электропривод переменного тока, в котором энергия скольжения возвращается в сеть через вентильный преобразователь электрической энергии (ГОСТ 16593—72).

Рис. 28. Схема замещения асинхронного двигателя с введением добавочной ЭДС
Асинхронный двигатель такого привода подключается непосредственно к сети, а преобразованию подлежит лишь часть потребляемой энергии — энергия скольжения. Это приводит к тому, что КПД каскадных электроприводов является наиболее высоким среди других систем регулируемого привода.
Принцип построения вентильных каскадных электроприводов основан на введении в цепь ротора асинхронного двигателя с фазовым ротором добавочной ЭДС. Вводимая ЭДС во всех режимах работы должна иметь ту же частоту, что и основная ЭДС, в противном случае эти ЭДС не смогут вступить во взаимодействие. Обобщенная схема замещения асинхронного двигателя при введении в цепь ротора добавочной ЭДС Ед приведена на рис. 28. Угол сдвига θ показывает, как ориентирована по фазе добавочная ЭДС относительно основной ЭДС машины Е2.
Влияние добавочной ЭДС рассмотрим на векторных диаграммах, показанных на рис. 29. При рассмотрении схемы замещения и векторных диаграмм будем использовать приведенные к числу витков обмотки статора параметры роторной цепи и добавочную ЭДС. Все приведенные величины обозначаются штрихом.
При отсутствии добавочной ЭДС векторная диаграмма двигателя имеет вид, показанный на рис. 29, а.
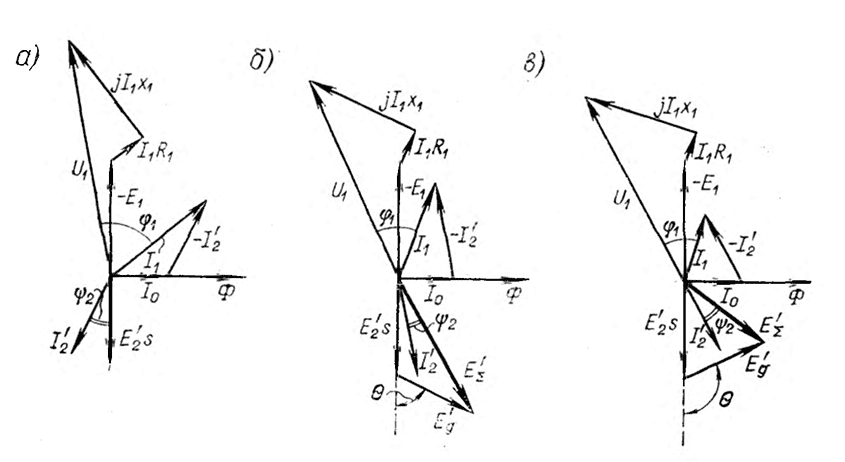
Рис. 29. Векторные диаграммы асинхронного двигателя при введении добавочной ЭДС:
а — при θ = 0; б — при θ < 90°, в — при 0 > 90°
Введение ЕА при значении угла 0<90° вызывает возрастание результирующей ЭДС ΕΣ роторной цепи машины (рис. 29, б), что ведет к росту тока и момента, развиваемого двигателем. Возникают условия для увеличения скорости двигателя, при этом возрастание скорости будет происходить до тех пор, пока момент двигателя не уравновесится моментом нагрузки. При малых углах θ и Eд>E2-s равновесие моментов двигателя и нагрузки наступает при отрицательном скольжении, т. е. при скорости выше синхронной.
В том случае, когда угол 0>9О°, вводимая в цепь ротора ЭДС уменьшает результирующую ЭДС роторной цепи (рис. 29, в). Ток ротора и момент, развиваемый двигателем, уменьшаются. Двигатель тормозится, причем это торможение при достаточной величине добавочной ЭДС может быть осуществлено до полной остановки привода.
Из рассмотренных диаграмм также следует, что при значениях угла 0, отличных от 0 и 180°, ЭДС вводимая в цепь ротора, оказывает влияние на коэффициент мощности двигателя. При углах 0, близких к 90°, существенно уменьшается реактивная составляющая тока статора.
Таким образом, регулирование скорости двигателя обеспечивается в основном составляющей добавочной ЭДС, которая совпадает по фазе с основной ЭДС машины или находится с ней в противофазе. Составляющая добавочной ЭДС, опережающая основную
на угол 90°, обеспечивает улучшение коэффициента мощности двигателя.
При рассмотрении каскадных электроприводов принимают внутреннее сопротивление источника добавочной ЭДС, вводимой в цепь ротора, равным нулю, а закон изменения ЭДС Ед в функции времени — синусоидальным.
Реальный критический момент, достигаемый в каскадных электроприводах, имеет величину, согласно [9] и [10], Мк ≈ 0,83 Мк.н, т. е. перегрузочная способность асинхронного двигателя в каскадных схемах снижается на 17% сравнительно с нормальной схемой включения.
При наличии в цепи ротора добавочной ЭДС его момент при синхронной скорости оказывается не равным нулю. Из соотношения (3.9) видно, что этот момент определяется выражением
![]() (3.14)
(3.14)
Скорость идеального холостого хода двигателя ωх.x при М = 0 и введении добавочной ЭДС в цепь ротора можно определить, положив I2а= 0 в формуле (3.2). Отсюда
а скорость![]() или
или
 (3.15)
(3.15)
где ω0 — синхронная скорость вращения двигателя.
Как видно из (3.15), введение добавочной ЭДС в цепь ротора приводит к неравенству скоростей синхронной и идеального холостого хода двигателей.
Примерные механические характеристики вентильного каскадного электропривода при подсинхронной скорости показаны на рис. 30. Характеристики каскадного привода подобны характеристикам системы генератор—двигатель, имеют достаточно высокую жесткость и при изменении управляющего воздействия (угла регулирования инвертора) перемещаются параллельно друг другу вдоль оси ординат. Глубина регулирования определяется величиной вторичного напряжения трансформатора, связывающего инвертор с сетью.
Поскольку физические процессы, протекающие в режиме противовключения, не отличаются от таковых для двигательного режима, то полученные выше соотношения справедливы и для расчета режима противовключения.
Физические процессы при работе каскадного электропривода в генераторном режиме со сверхсинхронной скоростью, подобны процессам, характерным для двигательного режима при скорости ниже синхронной. Отличие состоит лишь в том, что скольжение меняет знак на обратный.
Более сложным является режим генераторного торможения при скорости ниже синхронной. В этом случае роторная группа вентилей должна быть управляемой и работать в инверторном режиме, а трансформаторная группа — в выпрямительном режиме. Анализ работы каскадных электроприводов в этом режиме показывает, что механические характеристики при генераторном торможении в зоне ниже синхронной скорости не имеют экстремальных точек, а предельное значение тормозного момента ограничивается условиями обеспечения инверторного режима.

Рис. 30. Механические характеристики вентильного каскадного электропривода
При работе в двигательном режиме со скоростью выше синхронной в роторной цепи двигателя будут иметь место те же процессы, что и в генераторном подсинхронном режиме.
Для более подробного знакомства с режимами работы электроприводов следует обращаться к специальной литературе [9] и [10].
Вторая составляющая добавочной мощности обусловлена реактивной составляющей добавочной ЭДС и поступает в цепь ротора двигателя при положительных значениях скольжения, т. е. при скорости ниже синхронной. При скорости выше синхронной эта мощность отдается источнику добавочной ЭДС.
Как было упомянуто выше, в каскадных электроприводах возможно улучшение коэффициента мощности двигателя, однако в настоящее время появились более совершенные средства компенсации реактивной мощности, поэтому в дальнейшем это свойство каскадных установок рассматриваться не будет.