В § 2.3 были получены основные соотношения для частотнорегулируемого синхронного двигателя. При реализации этих соотношений и построении частотно-регулируемых электроприводов, в отличие от синхронных приводов с питанием от сети, нельзя построить автоматическую систему возбуждения с непосредственным использованием напряжения и тока статора машины, поскольку напряжение и частота переменны. Поэтому в таких системах целесообразно строить независимое возбуждение с корректировкой тока возбуждения по моменту нагрузки или по углу θ.
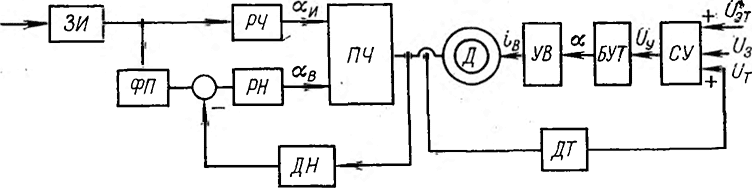
Рис. 27. Схема управления синхронным двигателем
Наиболее просто измерить ток фазы статора синхронного двигателя или его активную составляющую. Поэтому далее рассмотрена система с корректировкой режима по току. Функциональная схема такой системы с преобразователем частоты со звеном постоянного тока приведена на рис. 27. Обозначения соответствуют принятым на рис. 26. Тиристорный преобразователь ПЧ обеспечивает регулирование по закону U1/f1 = const. Так как при выводе формулы (2.17) предполагалось, что = 0, а преобразователь имеет значительное сопротивление, то для компенсации падения напряжения в преобразователь введена отрицательная обратная связь по напряжению.
Возбуждение двигателя осуществляется от управляемого выпрямителя, причем задающий сигнал соответствует номинальному току возбуждения. Для стабилизации перегрузочной способности в схеме использована обратная связь по разности Iх—I10 (где I10 — ток статора в режиме холостого хода). С этой целью на вход системы вводится отрицательный сигнал
![]()
где kд.т — коэффициент передачи датчика тока.