В настоящее время учет влияния токов нагрузки на работу защит шин производится приближенно, из условия отстройки от максимального значения тока нагрузки с учетом коэффициентов кратности пускового тока и самозапуска.
Для устройств релейной защиты наибольшее значение имеют следующие режимы работы электродвигателей.
- Продолжительный режим с максимально допустимой перегрузкой; ток в этом режиме обозначается Iр,ф. Обычно для двигателей Iр,ф=1,05Iном, где Iном— номинальный ток двигателя.
- Пуск или самозапуск двигателей (одиночный или групповой). Токи в этих режимах обозначаются Iп и Iс соответственно, причем Iссз=kсз/Iном. Обычно значение kсзнаходится в пределах от 1 до kп,т; у мощных двигателей при самозапуске с малым временем перерыва питания (до 0,5 с) kсз может достигать 1,7 kп,т. Кратность пускового тока kп,т=5:7.
- Подпитка двигателями точки КЗ. У асинхронных двигателей процесс подпитки продолжается несколько периодов. У синхронных двигателей процесс подпитки может длиться в течение всего аварийного режима.
- Потребление двигателями нагрузки тока при внешнем удаленном КЗ, что наиболее характерно для асинхронных двигателей. На первых же периодах симметричного и несимметричного КЗ происходит подпитка двигателями точки КЗ. Подпитка существует до тех пор, пока ЭДС двигателя превышает напряжение прямой последовательности в точке КЗ.
Периодическая составляющая тока подпитки асинхронного двигателя при трехфазном КЗ [3] равна:
![]()
где![]() —сверхпереходный ток подпитки;
—сверхпереходный ток подпитки;
![]() = (0,04—0,08) с — постоянная времени затухания периодической составляющей тока подпитки.
= (0,04—0,08) с — постоянная времени затухания периодической составляющей тока подпитки.
Для синхронного двигателя
![]()
где I∞ — установившийся ток подпитки; ![]() kп,тIном— сверхпереходный ток подпитки.
kп,тIном— сверхпереходный ток подпитки.
Апериодическая составляющая тока подпитки составляет:
![]()
где .![]() — начальное значение апериодической составляющей; Та=(0,01—0,1) с—постоянная времени затухания апериодической составляющей.
— начальное значение апериодической составляющей; Та=(0,01—0,1) с—постоянная времени затухания апериодической составляющей.
Если к шинам подключена группа двигателей, то ее заменяют одним эквивалентным в соответствии с [3].
Быстрое затухание токов подпитки, а также их благоприятные фазовые соотношения (они не вызывают блокирования защиты) позволяют производить только их качественный учет. Гораздо более опасны токи нагрузки, имеющие место после затухания токов подпитки. Токи нагрузки существуют при несимметричных КЗ в зоне и вне зоны действия, а также при удаленных симметричных КЗ вне зоны действия защиты шин. В последнем случае токи нагрузки улучшают условия несрабатывания защит шин и по этой причине могут в расчетах не учитываться. Наибольшую опасность представляют токи нагрузки при несимметричных КЗ в защищаемой зоне, так как они оказывают блокирующее действие на многие типы защит шин. При симметричных КЗ на шинах после затухания токов подпитки токи нагрузки малы и не оказывают влияния на работу защит. Для неполных дифференциальных защит шин важно знать значение и фазу токов нагрузки при двухфазном КЗ в непосредственной близости от шин вне защищаемой зоны, так как указанные токи могут вызвать неселективное действие защиты.
При несимметричном КЗ асинхронный двигатель характеризуется своими сопротивлениями прямой z1 и обратной z2 последовательностей. Сопротивление прямой последовательности зависит от частоты вращения двигателя и находится в пределах zном≥z1≥хп, где zном— номинальное сопротивление; хп— сопротивление при пуске.
При существенном снижении оборотов (скольжение s>sкр, где sкр — критическое скольжение) сопротивления прямой и обратной последовательностей приблизительно одинаковы.
Точный расчет токов нагрузки двигателей затруднителен и требует большого объема вычислительной работы. Поэтому в расчетах для целей релейной защиты вводят следующие упрощения:
1) пренебрегают влиянием тока нагрузки на напряжения прямой, обратной и нулевой последовательностей в месте КЗ. При этом допущении несколько увеличиваются токи нагрузки по сравнению с реальными, что вносит некоторый запас в расчеты;
1) анализ поведения защит проводится для двух крайних случаев скольжения: s=sном, где sном— номинальное скольжение и s=1.
К первому случаю относят режимы, в которых двигатель еще не снизил числа оборотов, а ко второму — если он успел существенно затормозиться, т. е. s>sкр. Все встречающиеся на практике случаи будут являться промежуточными.
Векторная диаграмма токов и напряжений двигателя в нормальном режиме приведена на рис. 3.6, а. Принято, что сдвиг фаз![]()
При двухфазном КЗ фаз В и С получается общеизвестная векторная диаграмма напряжений и токов КЗ (рис. 3.6,б). За время затухания токов подпитки обороты ротора не успевают практически измениться, и сдвиг фаз для токов прямой последовательности φ1, по-прежнему равен φ (рис. 3.6,в). На рис. 3.6, а—в условные положительные направления токов нагрузки совпадают с направлениями токов на рис. 3.7, а.

Рис. 3.6. Векторные диаграммы токов КЗ и нагрузки при двухфазном КЗ:
а —нормальный режим; б — диаграмма токов КЗ; в —диаграмма токов нагрузки при /=0

Рис. 3.7. Совмещенные векторные диаграммы токов КЗ и нагрузки: а — поясняющая схема; б — токи КЗ и нагрузки при t=0; в — токи КЗ и нагрузки при заторможенных электродвигателях
Сдвиг по фазе между токами КЗ и токами нагрузки поврежденных фаз не превышает 90° и колеблется от 30 до 90°. Это особенно наглядно видно на рис. 3.7,б, где приведена совмещенная диаграмма токов КЗ и нагрузки при сдвиге фаз φ1=0ο между током и напряжением, а для обратной последовательности φ2=90°.
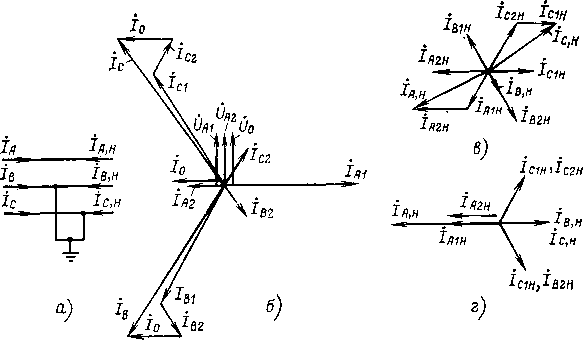
Рис. 3.8. Векторные диаграммы токов КЗ и нагрузки при двухфазном КЗ на землю:
а — поясняющая схема; б —диаграмма токов КЗ; в — токи нагрузки при 30°; г—токи нагрузки при заторможенных электродвигателях
На рис. 3.7, в приведена совмещенная диаграмма для заторможенного асинхронного двигателя, у которого х1=х2=хп. Сдвиг по фазе между токами КЗ и нагрузки в поврежденных фазах в последнем случае не превышает 90°.
Сопротивление прямой последовательности асинхронного двигателя x1 зависит от скольжения и определяется по кривым кратности пускового тока в функции от скольжения двигателя.