ПРИЛОЖЕНИЕ 2
ДЕФОРМАЦИЯ КАБЕЛЯ ПРИ ЕГО РАБОТЕ В СИСТЕМЕ БЕСКОНТАКТНОГО ЭНЕРГОПИТАНИЯ
Расчетная схема задачи
Гибкий кабель ГРШЭ 3x50+1X10+3x4 большой длины уложен на кронштейны, расположенные с шагом а=150 см по прямой, и поднят парой роликов с пролетом L =80 см на высоту h=20 см (рис. 1). Нагрузкой является собственный погонный вес кабеля. В процессе перемещения пары роликов кабель получает большие прогибы, определяемые параметрами схемы, жесткостью и собственным весом. Задачей исследования является установление аналитической зависимости между параметрами изогнутой осн, параметрами схемы a, h и параметрами El, g. Решение задачи позволит определить длину поднятой части кабеля на участке от ролика до точки касания с кронштейном. Примем за 0 продольные усилия.
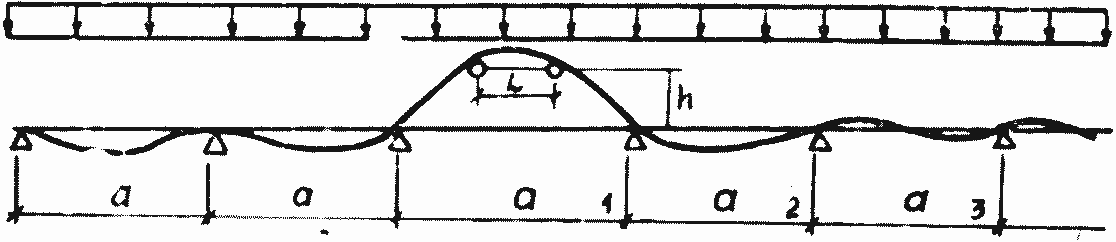
Рис. 1. Расчетная схема задачи об укладке кабеля на опоры
В процессе движения системы поддерживающих роликов меняется их ориентация относительно поддерживающих опор. Из схемы (рис. 2) видно, что наиболее неблагоприятным является момент поднятия кабеля с ближайшей опоры. В этот момент на весу оказывается наибольшая длина кабеля, равная сумме расстояний между кронштейнами а и некоторой длиной I.
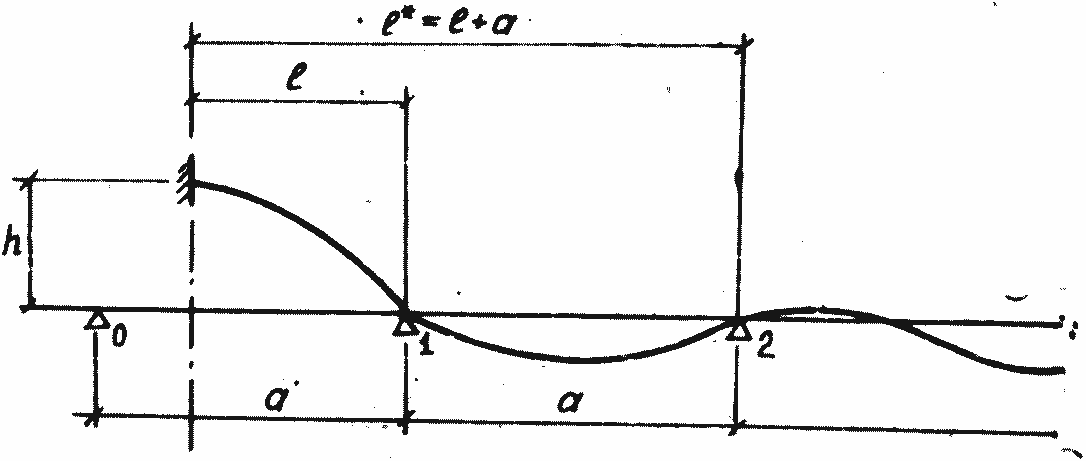
Рис. 2. Схема отключения нулевой опоры
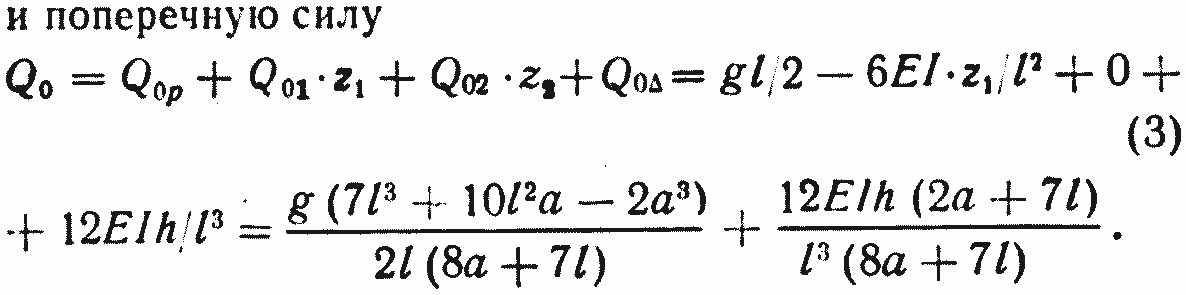
Отсечем левую часть кабеля и введем защемление на правом ролике (в сеч. 0). Введение защемления легко осуществить введением дополнительного ролика, ограничивающего поворот сечения согласно рис. 3, что также значительно облегчает проход кабеля черед магнитопровод токосъемного устройства. В момент отрыва кабеля от опоры 1 изогнутая ось кабеля на участке 0—2 описывается одним уравнением, а опорная реакция А1 равна нулю. Это условие позволяет определить предельную длину кабеля l* = l + а и произвести оценку формы изогнутой оси поднятого участка с целью постановки критерия беспрепятственного прохода системы роликов.
![]()
Рис. 3. Схема включения защемления
Решение задачи
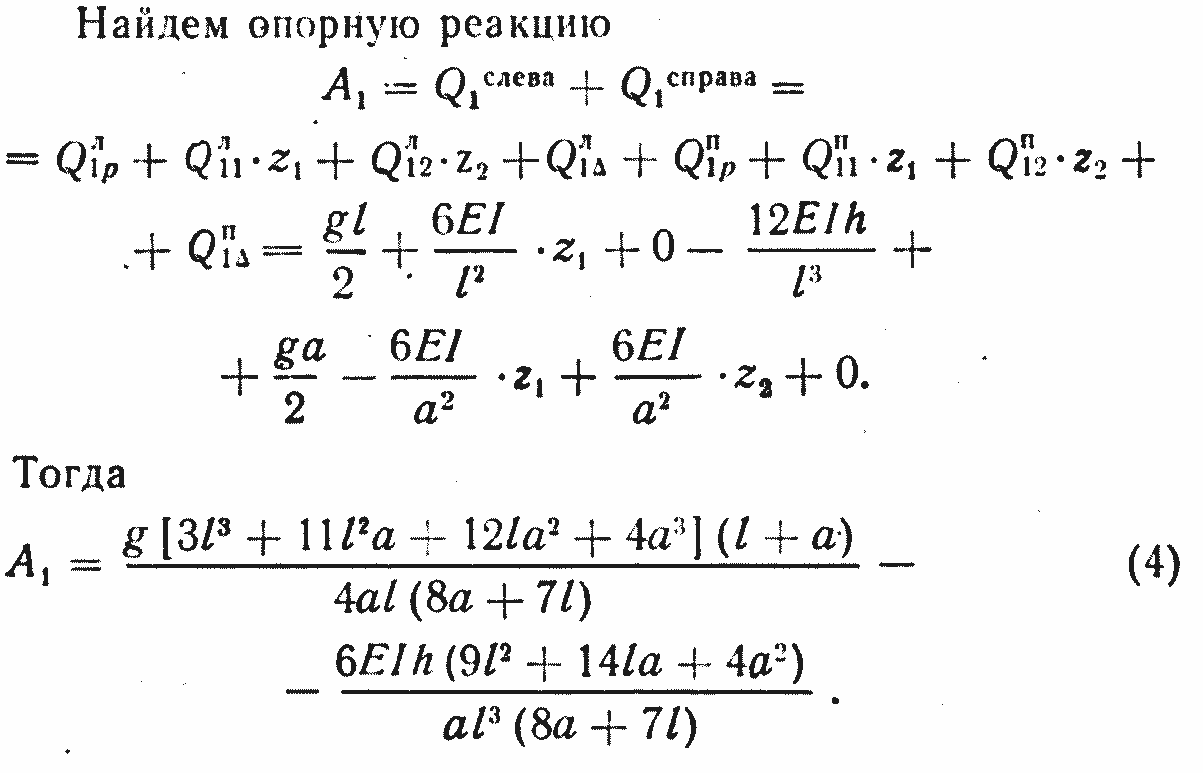
Расчет прогибов кабеля произведем методом перемещений для описанного момента времени. Основная система образуется введением защемлений в точках 1, 2, 3 (см. рис. 1) и далее. В качестве воздействий принят собственный вес кабеля и поднятие точки 0 на высоту h. Построим эпюры от единичных воздействий, собственного веса и поднятия опоры 0.
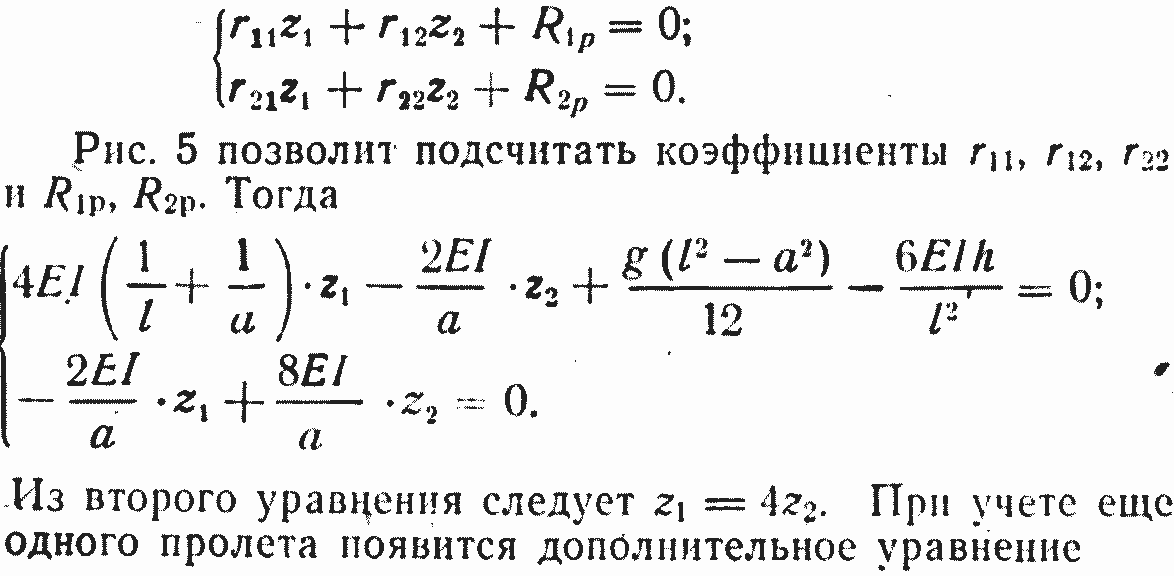
В расчетной схеме ограничимся тремя пролетами с введением защемления в сечении 3 (рис. 4). Это незначительно снизит точность расчетов (примерно на 6%) при значительном облегчении их и позволит получить обозримые результаты. Запишем систему уравнений
![]()
Таким образом, влияние z3 на прогиб в пролете 0—1 является в 16 раз меньшим, чем что и позволяет ограничиваться указанными выше тремя пролетами.
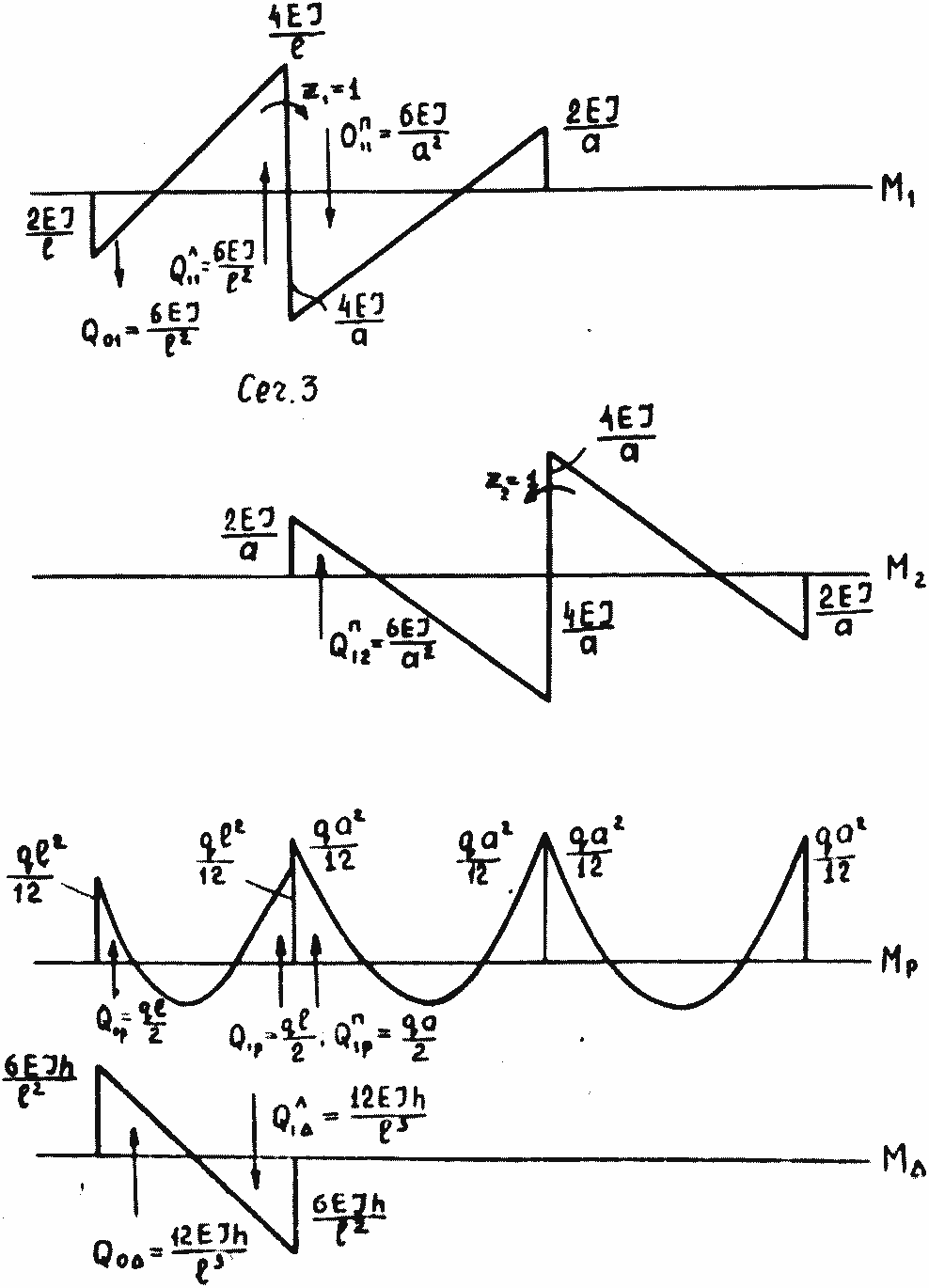
Рис. 4. Расчетная схема метода перемещений
![]()
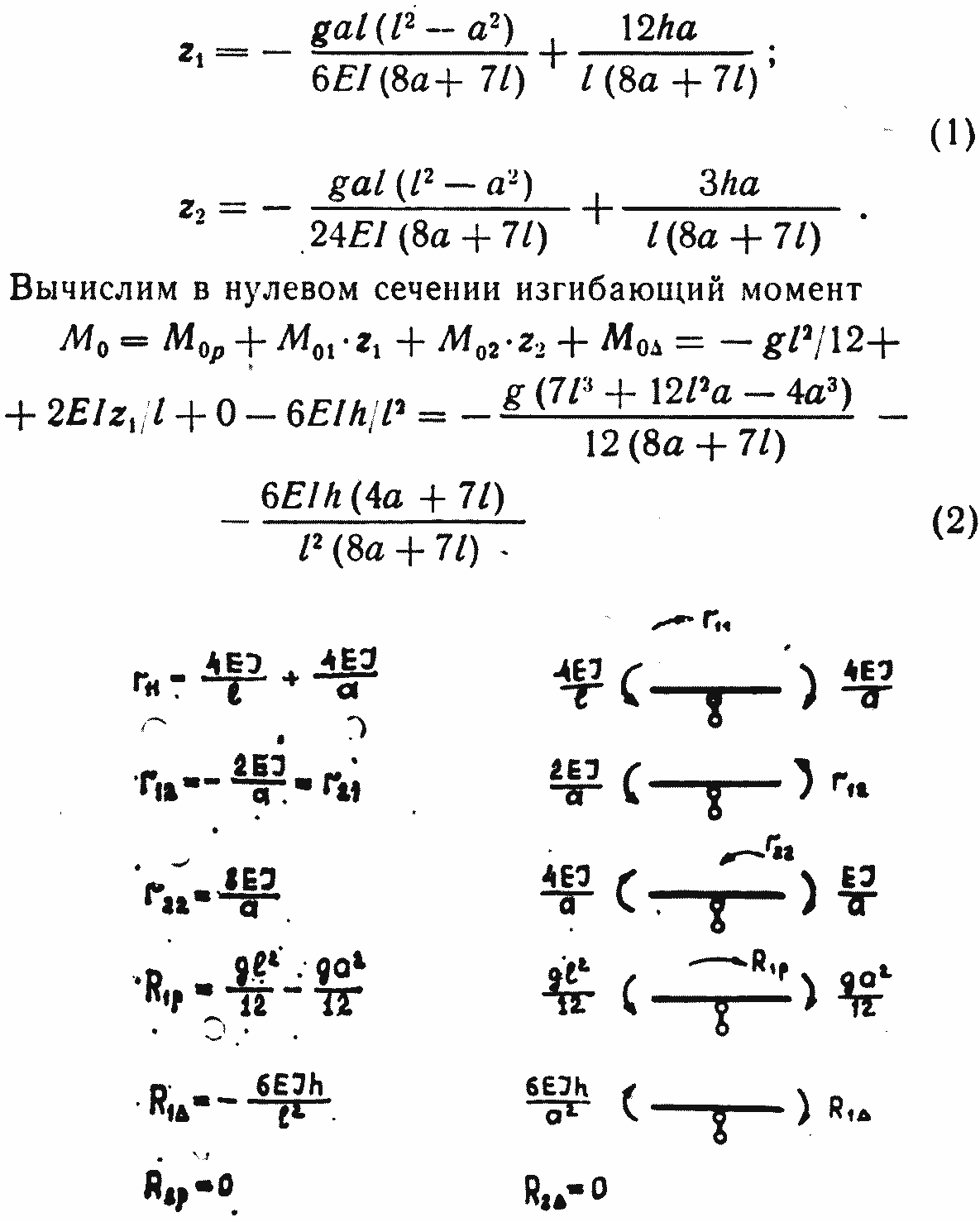
Рис. 5. Коэффициенты матрицы метода перемещений
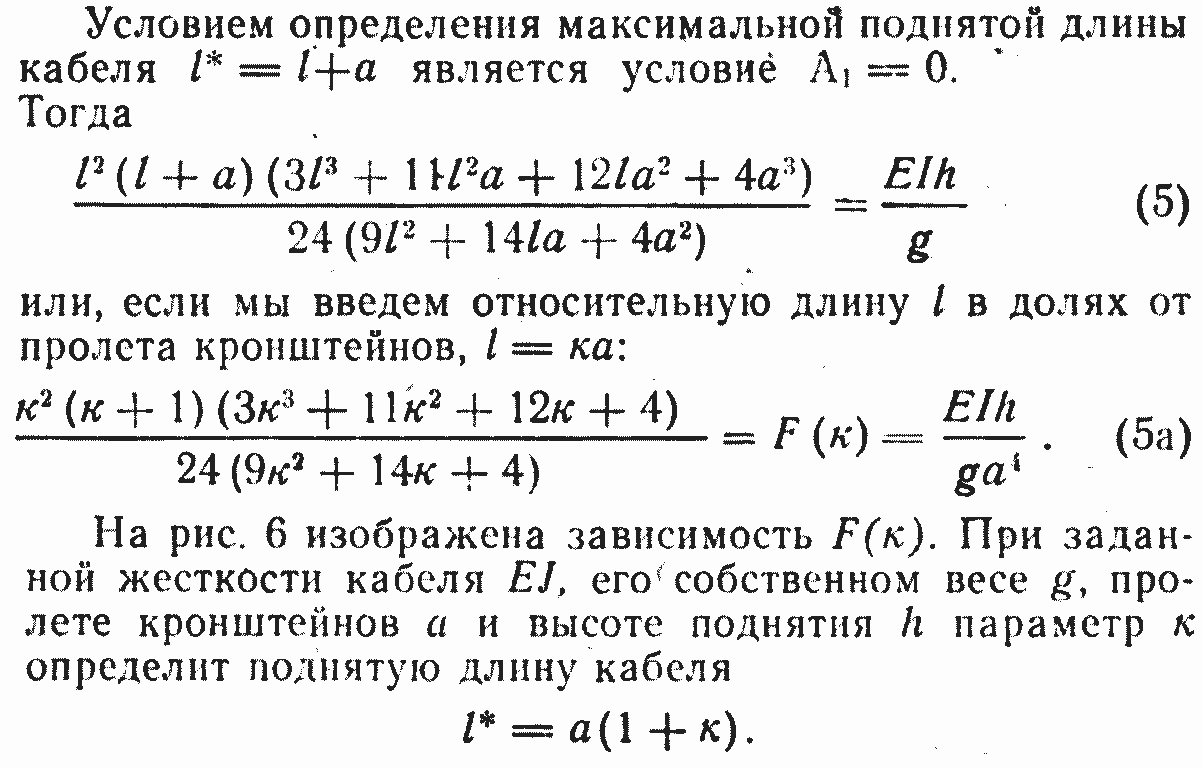
3. Оценка поднятой длины кабеля
4. Уравнение изогнутой оси поднятой части кабеля
Построим изогнутую ось поднятой части кабеля в критический момент работы устройства при A1=0. Уравнение изогнутой оси по методу начальных параметров имеет вид
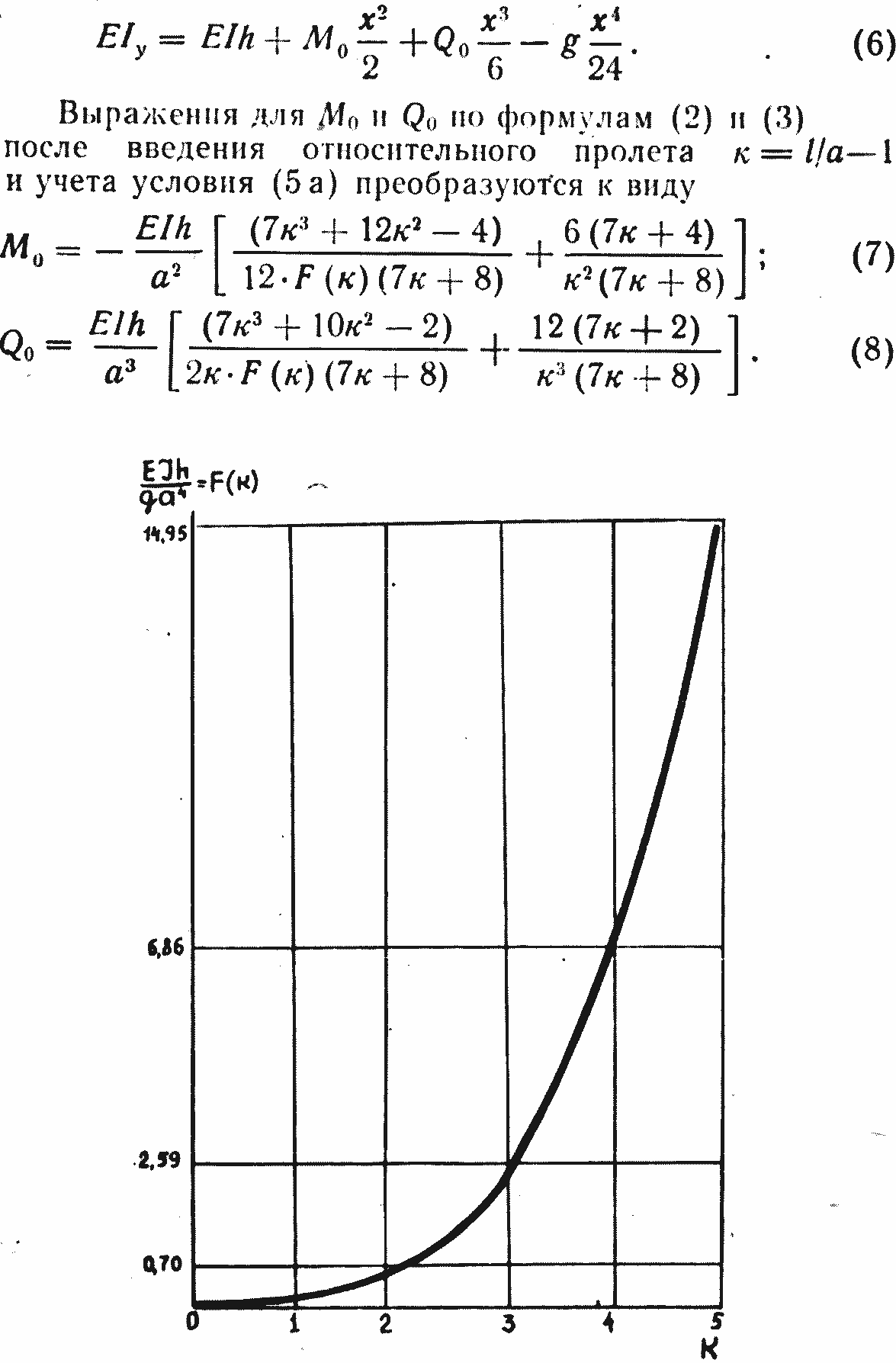
Рис. 6. Функция пролетов F(k)
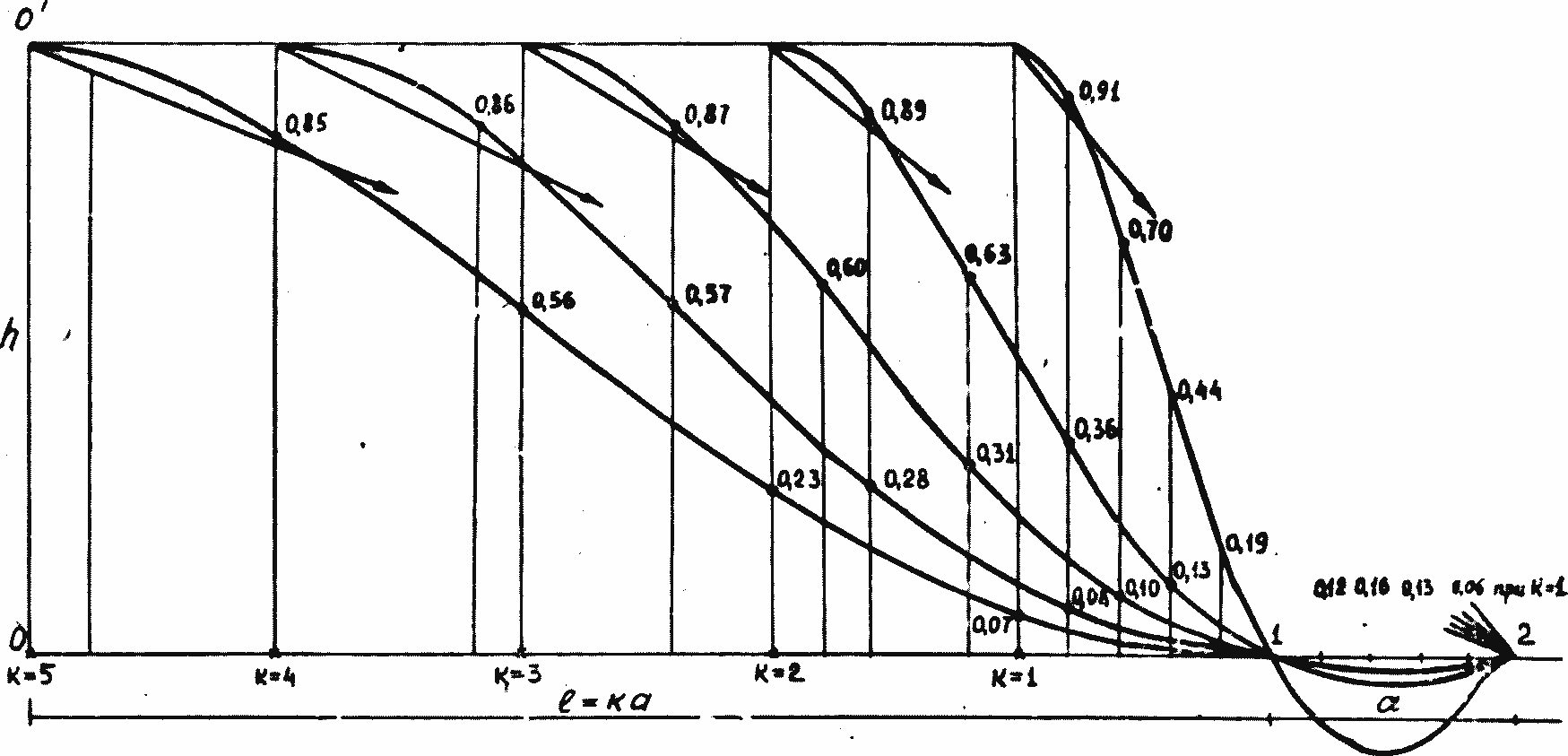
Рис. 7. Вид изогнутой оси кабеля на различных участках «поднятых длин»
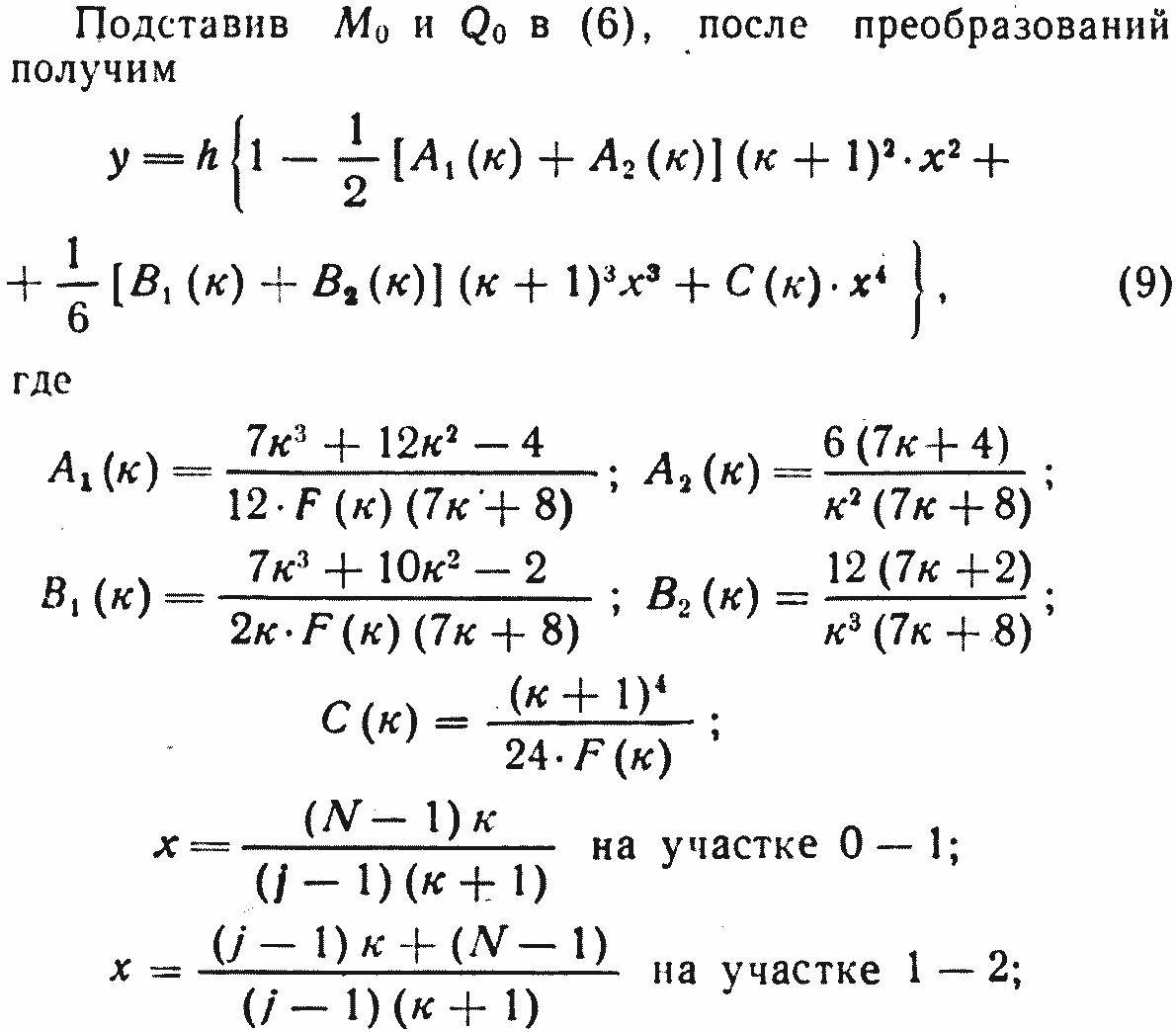
j—число сечений; N — помер сечения, в котором определяется прогиб у.
При делении каждого из участков на 5 частей и для разных (j=6) поднятых длин k=1-5 изогнутые оси представлены на рис. 7.
Изогнутая ось кабеля на участке 0—2 при любых поднятых длинах имеет вид кривой, большая часть которой находится ниже прямой, соединяющей точку 0'(y=h) и точку 2(у=0). Это является следствием учета собственного веса кабеля g, направленного сверху вниз, и наличия на опоре 2 упругого защемления соседним пролетом 2—3.
Кроме того, форма изогнутой оси приводит к тому, что при появлении сдвигающего горизонтального усилия в сечении 1 изогнутая ось опускается вниз, сокращая поднятую длину (так как кабель вновь касается опоры 1 и для отрыва его от опоры требуется перемещение точки 0' вправо), что усложняет работу устройства.
5. Рекомендации по улучшению схемы крепления кабеля
Рис. 7 показывает, что наиболее благоприятное очертание кривой соответствует поднятой длине кабеля ![]() при параметре схемы
при параметре схемы![]() . Очевидно также, что такой параметр к может быть достигнут (см. рис. 6) при параметре F(k) = 0,70.
. Очевидно также, что такой параметр к может быть достигнут (см. рис. 6) при параметре F(k) = 0,70.
Если считать собственный вес кабеля g величиной постоянной (определенной техническими требованиями), то достигнуть требуемого параметра F(k) возможно увеличением жесткости кабеля EI, увеличением высоты подъема его h и уменьшением расстояния между поддерживающими кронштейнами а.
Реально же принятый кабель ГРШЭ—3x50+1X10+3X4 имеет EI=1000 кг/см2; g=0,033 кг/см; а=150 см; А= 20 см, что дает F(k) =0,012 и соответствует параметру к<<1.
Увеличение высоты поднятия кабеля при прочих равных условиях является нерациональным вследствие малой эффективности и невыгодной формы кривой. Более эффективным является сокращение расстояния между кронштейнами. Для получения k=2 для принятого кабеля потребуется
![]()
однако это потребует укладки кабеля на непрерывное поддерживающее устройство. При этом поднятая длина кабеля определится из условия (5) при а=0:
![]() что для ГРШЭ дает 1=58 см.
что для ГРШЭ дает 1=58 см.
Анализ показывает: 1) при сохранении схемы устройства выбранный кабель требует непрерывной поддерживающей конструкции; 2) при сохранении расстояния между кронштейнами и требуемой поднятой длине (k=2) необходим кабель с жесткостью
![]()
такую жесткость гибкие кабели не имеют.
Из рис. 7 следует также, что если обеспечить расположение большей части кривой выше линии h—0, проведенной через сечения 0—2, то появление сдвигающих усилий приводит к подъему кривой и облегчению движения устройства.
Возможны несколько способов такого поднятия: во-первых, можно осуществить дополнительный поворот сечения 0' против часовой стрелки, что поднимет изогнутую ось выше на ординаты, определяемые кривой (рис. 8). Эффективность этого способа снижена из-за положения максимума подъема не над опорой Ai; во-вторых, возможна реализация перемещения вверх опоры 1 при подходе устройства к ней на расстояние не менее I*. Тогда ординаты кривой (см. рис. 7) нужно сложить с ординатами (рис. 9).
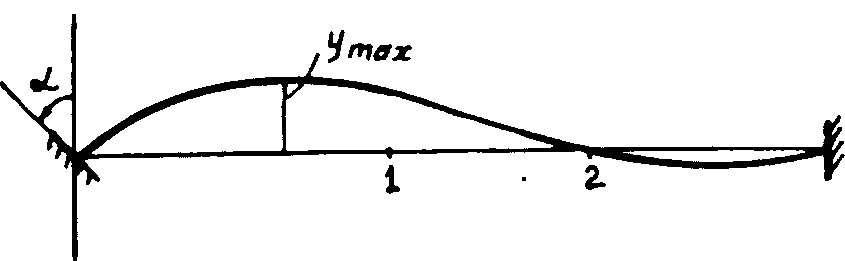
Рис. 8. Схема поворота нулевого сечения кабеля
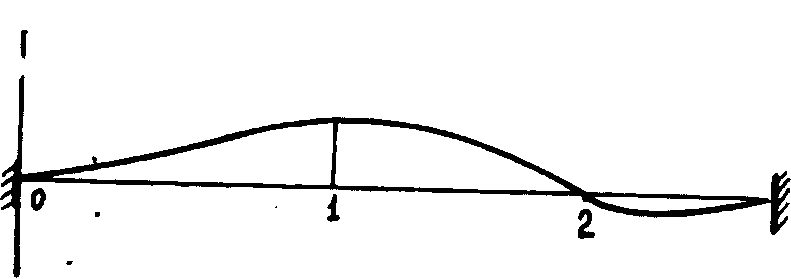
Рис. 9. Схема вертикального перемещения первой опоры
Расчет прогибов кабеля при осуществлении первого и второго способов выполняется в рамках описанной выше методики путем введения дополнительных внешних воздействий: поворота сечения 0' на угол а, подъема сечения 1 на высоту Δ.
Третий способ поднятия состоит в одновременном увеличении жесткости кабеля на изгиб и поднятии изогнутой оси. Здесь следует ввести в конструкцию кабеля предварительно напряженный упругий элемент (например, резиновый, осуществляющий деформацию кабеля по рис. 10, а.
Взаимное расположение упругого элемента и кабеля изображено на рис. 10, б.
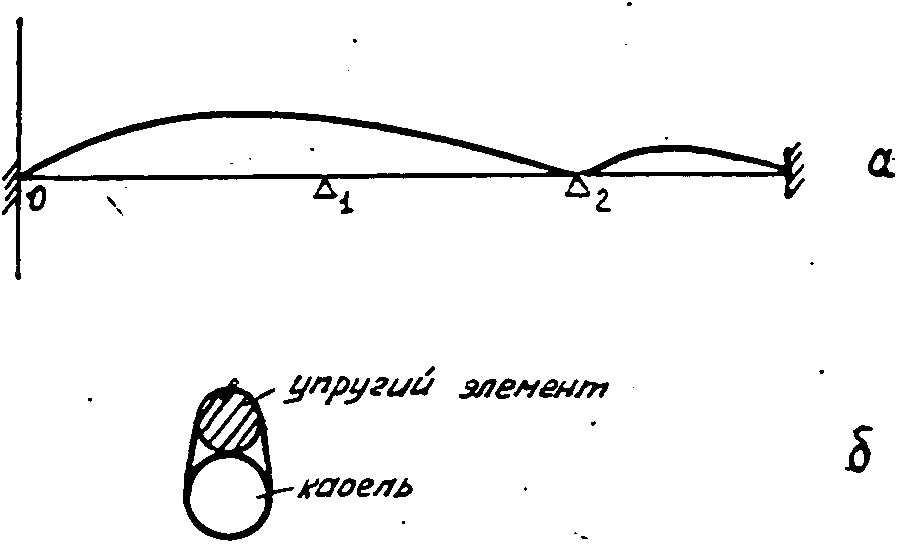
Рис. 10. Улучшение схемы крепления кабеля за счет введения упруго-напряженных элементов: а — вид изогнутой оси кабеля; б — взаимное расположение кабеля и упругого элемента
Четвертый способ состоит в создании продольной натяжки кабеля сосредоточенными грузами на концах линии, что при больших длинах ее потребует выполнения опорных частей кронштейнов в виде вращающихся роликов. Дополнительное натяжение кабеля поднимает кривую выше в сторону получения больших параметров поднятой длины к.
Пятый способ заключается в осуществлении выборки длины кабеля вращающимися фрикционными роликами в сечении 0. При этом должно быть компенсировано проскальзывание роликов относительно кабеля.
МЕХАНИЧЕСКИЕ ИСПЫТАНИЯ ГИБКИХ КАБЕЛЕЙ
Виктор Михайлович МУСАЛИМОВ
Борис Васильевич СОХАНЕВ