Кроме подъема или опускания колонны бурильных труб (КТБ) с помощью буровой лебедки можно осуществлять подъем и опускание незагруженного элеватора, подачу долота на забой и ряд других вспомогательных операций. Так как все эти операции требуют различной мощности и характеристик электропривода, то в современных буровых установках для вспомогательных операций применяются отдельные механизмы с индивидуальным электроприводом. В этом случае буровая лебедка с электроприводом в основном используется для подъема и опускания КТБ, причем для подъема КТБ служат приводные двигатели, а для торможения при опускании — вспомогательные тормоза или приводные двигатели.
Подъем КТБ состоит из отдельных циклов, число которых равно числу свечей; за время одного цикла происходит подъем на высоту одной свечи (25 — 37 м), затем ее отвинчивают, переносят и устанавливают, после чего цикл повторяется. Таким образом, по мере подъема вес КТБ дискретно уменьшается и, следовательно, уменьшается момент статического сопротивления на валу приводного двигателя. Диапазон изменения момента статического сопротивления определяется отношением веса максимального груза к весу крюка с незагруженным элеватором и составляет от 14:1 до 20:1, причем большой диапазон относится к буровым лебедкам большей грузоподъемности. Так как время работы привода лебедки при подъеме КТБ труб перемежаются паузами для отвинчивания, переноса и установки труб, а также спуска крюка с незагруженным элеватором, то режим работы привода лебедки — повторно-кратковременный с относительной продолжительностью включения 25 — 40 %.
При наличии уменьшающегося момента статического сопротивления на валу двигателя номинальной мощностью ё наибольшая производительность лебедки (без учета времени переходных процессов) может быть достигнута, если по мере подъема труб скорость подъема увеличивается, т.е. если выполняется условие
![]()
где ас — момент сопротивления на валу барабана лебедки; ω — угловая скорость барабана лебедки; η — КПД передач от двигателя к барабану лебедки.
Передаточные числа, число передач и диапазон регулирования частоты вращения электродвигателя выбирают обычно таким образом, чтобы механическая характеристика привода была близка к кривой постоянной мощности.
Изменять частоту вращения барабана лебедки (скорости подъема груза) для выполнения условия можно ступенчато с помощью многоскоростных трансмиссий или бесступенчато с помощью электропривода с широким диапазоном регулирования частоты вращения. Возможно также уменьшение числа ступеней механической передачи до 2 при наличии электропривода с ограниченным диапазоном регулирования частоты вращения.
При бесступенчатом изменении скорости подъема упрощается и становится дешевле лебедка, однако ее привод становится сложнее и дороже; при ступенчатом изменении повышаются сложность и стоимость лебедки, но уменьшается сложность и стоимость привода. Технико-экономическими расчетами установлено, что чем больше глубина бурения, тем эффективнее применение регулируемого электропривода.
Число приводных электродвигателей определяется многими причинами (унификация применяемых электрических машин, удобство компоновки на ограниченной площади и др.), поэтому встречаются однодвигательные, двухдвигательные, трехи даже четырехдвигательные схемы. Появление трех- и четырехдвигательных схем объясняется стремлением к унификации электрооборудования, применяемого на установках большой мощности.
В отечественной и зарубежной практике широко применяют двухдвигательный привод. Двигатели двухдвигательного привода лебедки выбирают равной мощности с обязательной проверкой возможности подъема КБТ максимального веса одним двигателем на низкой передаче.
Такой привод обеспечивает работу с пониженной производительностью в случае выхода из строя одного из двигателей, а также позволяет отключить один из двигателей при снижении нагрузки, что дает экономию электрической энергии. Однако два двигателя половинной мощности в 1,2 раза тяжелее и дороже, чем один двигатель большой мощности; требуется устройство для равномерного распределения нагрузки между двумя двигателями, работающими на один вал
и др.
Основное время спускоподъемных операций (примерно 50 %) затрачивается на выполнение операций с КБТ, когда нагрузка на крюке Q составляет некоторую часть а максимальной грузоподъемности Qmax спускоподъемного агрегата, т.е. а = Q/Qmax. Поэтому особое внимание при проектировании буровых установок уделяют выбору высших скоростей перемещения КБТ и особенно незагруженного элеватора (подъем его осуществляется на каждом цикле спуска КБТ на одну свечу).
Исследованиями установлено, что при длине свечи 25 м рациональная величина высшей скорости составляет 1,6 — 1,7 м/с. Во всех случаях скорость подъема незагруженного элеватора должна быть не менее 1,4—1,5 м/с.
Требуемая механическая характеристика регулируемого электропривода буровой лебедки изображена на рис. 1. Участок AQe соответствует работе на высшей передаче, а участок ёDE— на низшей. Участок AQ соответствует работе с рациональной высшей скоростью подъема, т.е. при постоянной частоте вращения электродвигателя nmax (в реальных условиях жесткость механической характеристики не идеальна и по мере увеличения нагрузки несколько снижается скорость). Точка Qсоответствует режиму полного использования установленной мощности привода при соответствующем значении рабочей перегрузки. Участок AQCD соответствует диапазону длительно действующих нагрузок при подъеме КБТ (в том числе тока D — нагрузке от КБТ максимальной массы), участок DE— работе с обсадными трубами массой более массы КБТ, FEсоответствует расхаживанию обсадных колонн и ликвидации аварийных ситуаций (при этом скорость крЕВка равна или менее 0, 1—0,2 м/с). Точка 0 соответствует максимально допустимой в течение 15 с перегрузке двигателя, которая в зависимости от типа двигателя постоянного тока составляет 1,7 — 2,25.

Рис. 1. Механическая характеристика регулируемого электропривода спуско-подъемного агрегата:
v — линейная скорость крюка; Q — усилие на крюке
Таким образом, общий диапазон регулирования скорости определен точками. Определение необходимого числа механических ступеней регулирования скорости (передач) подъема при заданном рабочем диапазоне зависит от регулировочных свойств привода. В связи с дискретным характером изменения нагрузки на крюке и постоянной величиной установленной мощности привода необходимо в результате рационального выбора числа передач и соответствующих им передаточных отношений обеспечить наилучшее использование ограниченной мощности привода.
Исследованиями установлено, что при двухдвигательном регулируемом электроприводе буровой лебедки целесообразно иметь от двух до четырех передач.
Таким образом, электропривод спускоподъемного агрегата в режиме подъема КБТ должен отвечать следующим основным требованиям:
иметь необходимый диапазон регулирования скорости (10:1) и возможность регулирования скорости в режиме постоянной мощности;
иметь достаточную перегрузочную способность (1,8 — 2,2 от номинального момента) для выполнения операций, связанных с ликвидацией аварий и расхаживанием колонны обсадных труб;
пусковые характеристики должны обеспечивать плавный, но достаточно интенсивный разгон электропривода;
жесткость механической характеристики должна быть такой, чтобы статизм не превышал 5—8 % номинальной частоты вращения;
должен обеспечивать остановку крюка талевой системы с точностью ±(30 — 40) мм.
Режим работы электропривода — повторно-кратковременный с изменяющейся от цикла к циклу относительной продолжительностью включения.
Указанным требованиям в полной мере удовлетворяют электроприводы по системе ТП — Д и ПЧ — АД. В современных отечественных буровых установках с индивидуальным электроприводом основных механизмов получил широкое применение электропривод по системе ТП — Д с подчиненным управлением координат и двухзонным регулированием скорости.
Функциональная схема электропривода буровой лебедки с зависимым управлением током возбуждения электродвигателя изображена на рис. 2, а.
Управление скоростью подъема КБТ в первой зоне осуществляется следующими регуляторами: ПИ-регулятором тока РТ, П-регулятором скорости РС и регулятором мощности РМ. При этом САУ действует как обычная система регулирования скорости, обеспечивающая режим постоянной мощности электропривода. Скорость подъема КБТ задается сельсинным командоаппаратом СК.
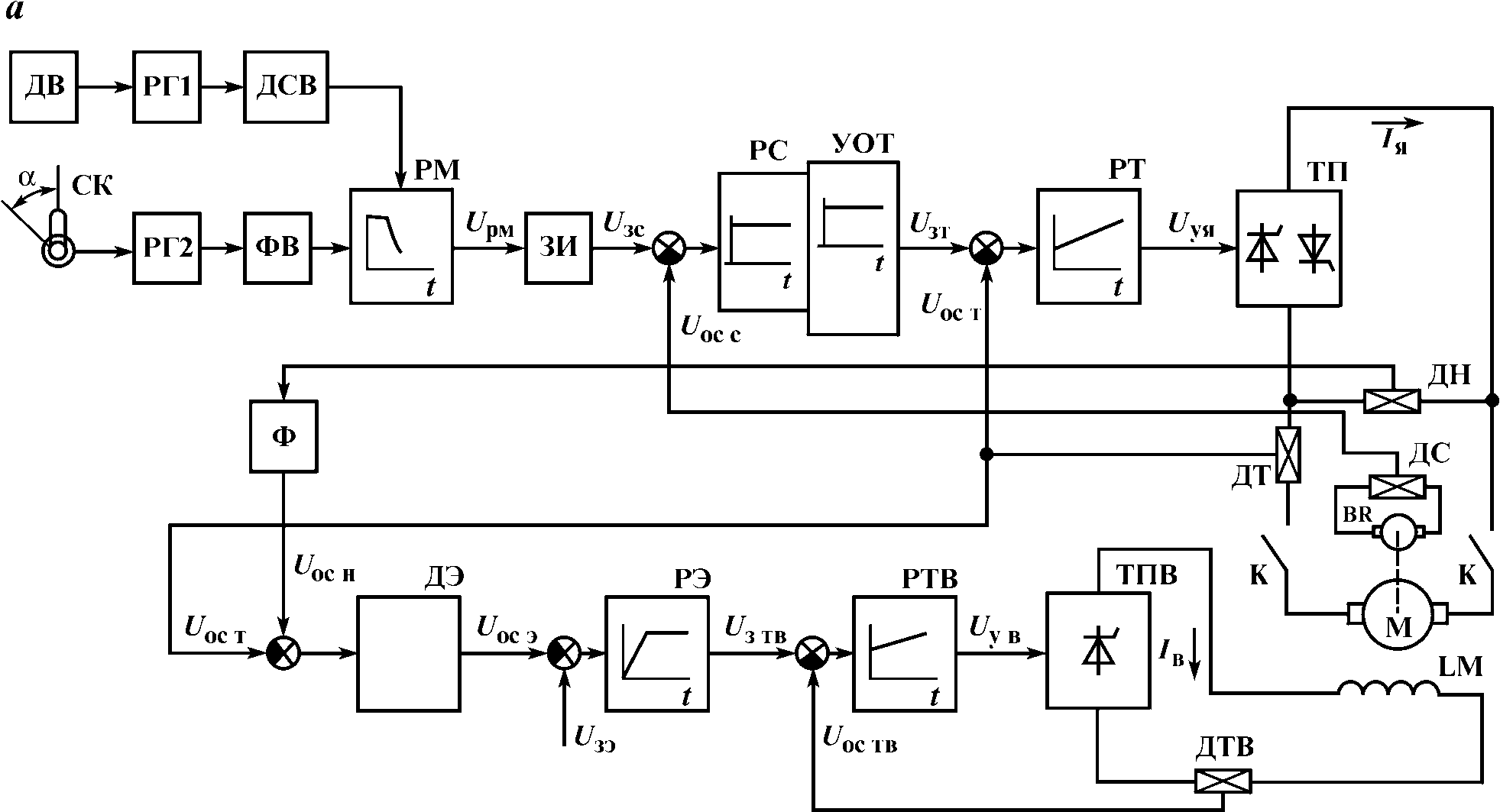
Рис. 2. Функциональная схема (а), характеристики управления ( б), механическая характеристика (в) электропривода буровой лебедки с двухзонным регулированием скорости:
СК — сельсинный командоаппарат; ДТГ ДНГ ДВГ ДТВ, ДЭГ ДС — датчики соответственно тока якоря, напряжения, веса КБТ, тока возбуждения, ЭДС, скорости; РМ, РС, РТ, РЭ, РТВ — регуляторы соответственно мощности, скорости, тока якоря, ЭДС, тока возбуждения; УОТ — узел ограничения тока якоря; РП, РГ2 — гальванические развязки; ЗИ — задатчик интенсивности (ускорения) привода; LM — обмотка возбуждения двигателя; К — контактор; ФВ — фазочувстви-тельный выпрямитель; Ф — фильтр; ДСВ — делитель сигнала веса КБТ; U зс, U зт, U зтв, U зэ — сигналы соответственно задания скорости, тока якоря, тока возбуждения, ЭДС; U ост, U осн, U осс, U осэ, U ос тв — сигналы обратных связей соответственно по току якоря, напряжению, скорости ЭДС, току возбуждения; U рм, U ув, U уя — выходные сигналы соответственно регулятора мощности, регулятора тока возбуждения, регулятора тока якоря; Iя, Iв — ток соответственно якоря, возбуждения двигателя
Параметры регулятора PC настраиваются таким образом, что номинальная скорость подъема КБТ и ЭДС двигателя достигаются уже при некотором угле поворота рукоятки командоаппарата а = 0,5 amax (рис. 2 ). Дальнейшее увеличение угла поворота СК приводит к увеличению скорости за счет ослабления магнитного поля электродвигателя.
Управление скоростью во второй зоне осуществляется ПИ-регулятором тока возбуждения РТВ и П-регулятором ЭДС РЭ, при этом САУ действует как система стабилизации ЭДС двигателя. Сигнал, пропорциональный фактическому значению ЭДС, получают как разность сигналов датчика напряжения ДН и датчика тока ДТ, причем сигнал ДН является преобладающим. На вход регулятора РЭ подается постоянный сигнал задания U зэ, соответствующий номинальному значению ЭДС, и сигнал обратной связи по ЭДС U ос э. При регулировании скорости в первой зоне сигнал на выходе РЭ максимальный и равен уставке узла ограничения регулятора РЭ (регулятор находится в зоне «насыщения»), в связи с чем ток возбуждения остается постоянным и равным номинальному (см. рис. 6.8, ). После того, как будет достигнуто номинальное напряжение якоря, при дальнейшем увеличении угла поворота СК в пределах от 0,5 amax до amax напряжение на якоре и ЭДС несколько возрастает. При этом ЭДС немного превышает заданную величину (см. рис. 2 ). В этом случае вступает в действие регулятор РЭ и уменьшает ток возбуждения, поскольку регулятор РЭ выходит из зоны «насыщения» и работает на линейном участке характеристики. Сигнал задания на входе РС (сигнал U зс) почти полностью компенсируется сигналом обратной связи по скорости, снимаемым с тахогенератора BR. При повышении скорости во второй зоне от номинальной до максимальной напряжение на якоре увеличивается лишь на несколько процентов.
Таким образом, управление возбуждением является зависимым от управления каналом регулирования по цепи якоря, причем сигнал обратной связи по ЭДС является тем связующим звеном, который обеспечивает согласованное действие обоих каналов управления. Рассмотренная САУ обеспечивает линейную зависимость скорости от сигнала задания Uзс в диапазоне от нуля до максимальной скорости.
В электроприводе буровой лебедки уровень максимальной скорости должен изменяться в зависимости от веса КБТ таким образом, чтобы мощность, развиваемая приводом оставалась приблизительно постоянной. С этой целью предусмотрен узел регулирования мощности РМ (точнее — ограничения мощности) в зависимости от веса КБТ. Узел представляет собой пропорциональный усилитель с управляемым ограничением выходного напряжения. Уровень ограничения регулируется с помощью функционального преобразователя по нелинейному закону в зависимости от величины сигнала Uдв датчика усилия на крюке ДВ (см. рис. 2, а). При этом скорость с увеличением веса КБТ автоматически снижается, обеспечивая режим постоянной мощности электропривода. С увеличением усилия на крюке, благодаря действию узла ограничения мощности, напряжение на входе РС U зс, а, следовательно, и скорость подъема КБТ будут тем меньше, чем больше ее вес. При номинальном и более высоком усилии на крюке ослабление магнитного поля двигателя не происходит. Механическая характеристика электропривода буровой лебедки изображена на рис. 2.
Большие преимущества для электропривода буровой лебедки имеет частотно-регулируемый электропривод по системе ПЧ — АД с запатентованной фирмой АВВ системой прямого управления моментом электродвигателя (Direct Torque Control-DTC).
По сравнению с электроприводом по системе ТП — Д рассматриваемая система при одинаковом диапазоне регулирования скорости имеет меньшие габариты, лучшее быстродействие и более высокую надежность.
Электроприводы буровой лебедки, управляемые по системе ПЧ — АД, применяют на установках морского бурения, эксплуатируемых на месторождениях углеводородного сырья Северного моря.