Основные типы регуляторов, применяемых в системах управления электроприводами исполнительных механизмов буровых установок
Аналоговые регуляторы в системах подчиненного управления электроприводами строятся на основе операционных усилителей (ОУ) — усилителей постоянного тока с высоким входным и очень низким выходным сопротивлениями. Технология интегральных микросхем позволяет в настоящее время изготавливать высококачественные и недорогие ОУ. В некоторой части своего рабочего диапазона ОУ ведет себя как линейный усилитель напряжения с очень большим коэффициентом усиления (105— 106). Если в схеме ОУ не предусмотрена отрицательная обратная связь с выхода на вход, то из-за высокого коэффициента усиления, он обязательно попадает в режим насыщения. Поэтому схемы регулятора на базе ОУ содержат отрицательную обратную связь.
Операционный усилитель получил свое название благодаря тому, что с его помощью могут выполняться различные математические операции, такие как умножение, суммирование, интегрирование и дифференцирование. Типовые регуляторы строятся на базе инвертирующего усилителя, причем входные и выходные цепи, кроме сопротивлений, могут содержать емкости.
Поскольку коэффициент усиления ОУ велик (Ку = = 105+106), а выходное напряжение Увых ограничено напряжением питания Цп, то потенциал точки А (рис. 1, а) срА = = ивых/Ку близок к нулю, т.е. точка А выполняет функцию кажущейся земли (заземлять точку А нельзя, иначе схема станет неработоспособной).

Рис. 1. Структура аналогового регулятора, выполненного на операционном усилителе (а). Схема пропорционального регулятора с управляемым ограничением выходного сигнала (б). Характеристика вход-выход регулятора с управляемым ограничением выходного сигнала (в)
Схемы, передаточные функции и переходные функции регуляторов различных типов приведены в табл.
Схемы и динамические характеристики различных типов регуляторов
Тип регулятора | Схемы регулятора | Передаточная функция регулятора | Переходная функция регулятора |
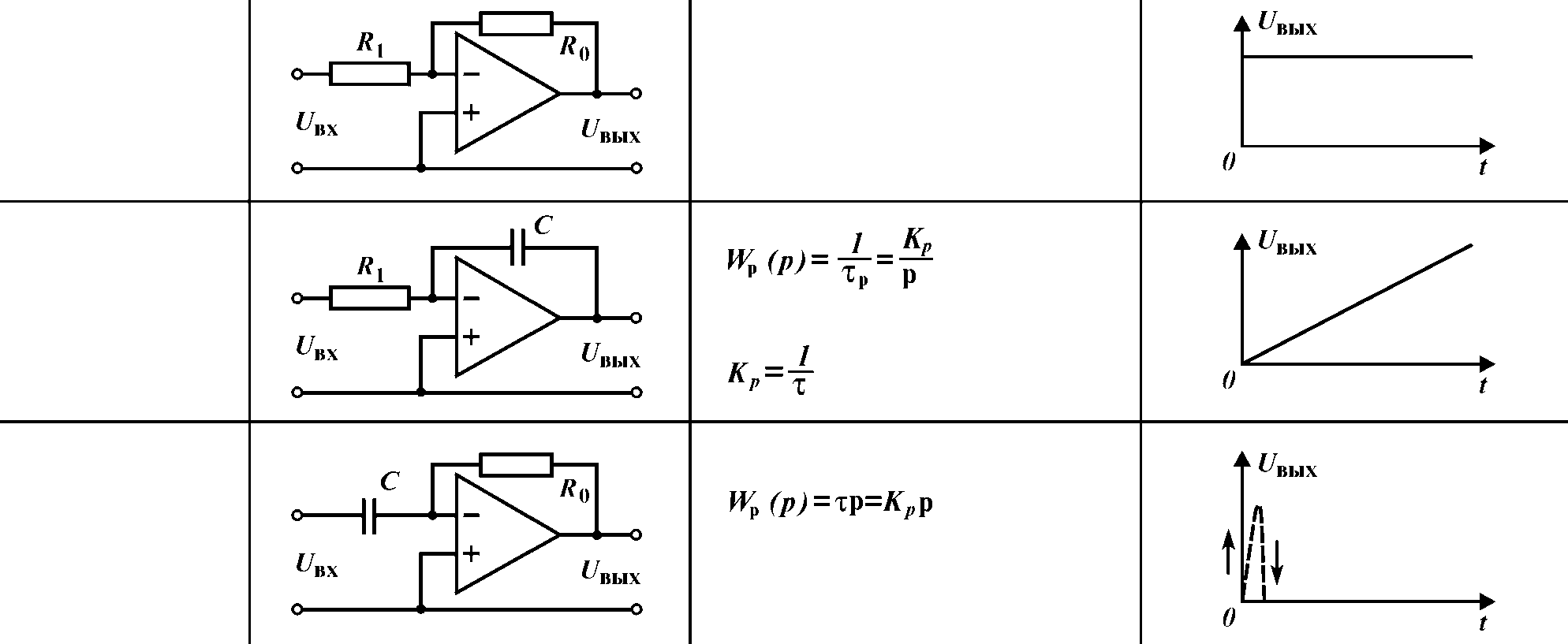

Для получения пропорционального регулятора (П-регулятора) на вход и в цепь обратной связи ОУ включают резисторы; интегрального регулятора (И-регулятора) во входную цепь включает резистор, а в цепь обратной связи — конденсатор; ПИ-регулятора во входную цепь-резистор, а в цепь обратной связи — последовательно соединенные резистор и конденсатор. ПИД-регулятор может быть выполнен на одном усилителе с помощью активно-емкостных цепей на входе и в цепи обратной связи.
Промышленностью выпускаются различные типы операционных усилителей на интегральных микросхемах (ИМС) — как круглой, так и прямоугольной формы. Наибольшее распространение для построения регуляторов получили ОУ типов К140УД7, К553УД2, К157УД2 и др.
Уменьшить размеры и повысить надежность устройств аналоговых систем управления электроприводами можно при внедрении гибридной технологии для их изготовления. При изготовлении гибридных интегральных схем (ГИС) активные элементы (ОУ) устанавливаются на печатной плате в твердотельном (бескорпусном) исполнении, а конденсаторы и резисторы — методом пленочной технологии (напылением пленок из проводящих, полупроводящих и непроводящих материалов). Полученный модуль может быть залит компаундом или помещен в корпус.
Ограничение координат электропривода (тока, скорости и др.) осуществляется включением в структуру регулятора внешнего контура регулирования узлов ограничения. Последние могут быть управляемыми и неуправляемыми. На рис., 6 приведена схема ограничения выходного напряжения пропорционального регулятора с отсекающими диодами VD1, VD2 и управляемым опорным напряжением Уоп. Схема позволяет получить несимметричную относительно начала координат характеристику вход-выход с различным уровнем ограничиваемого выходного напряжения (рис.) Возможны и другие варианты схем управляемого ограничения выходного напряжения ОУ с использованием транзисторов.
До последнего времени в автоматизированном электроприводе исполнительных механизмов отечественных буровых установок основное применение получили средства аналоговой вычислительной техники. За последние годы рядом проектных и научно-исследовательских организаций ведутся работы по созданию микропроцессорных систем управления. По сравнению с аналоговыми системами микропроцессорные системы обладают рядом преимуществ. Отметим некоторые из них.
Гибкость. Возможность путем перепрограммирования изменения не только параметров системы управления, но и алгоритмов и даже структуры. При этом аппаратная часть системы остается неизменной. В аналоговых системах потребовалась бы перекомпоновка аппаратной части. Программное обеспечение микроЭВМ можно легко корректировать как в предпусковой период, так и в процессе их эксплуатации. Благодаря этому снижаются затраты и сроки проведения наладочных работ и изменяется их характер, поскольку необходимые эксперименты по определению характеристик и параметров, а также настройка регуляторов могут быть произведены автоматически самой микроЭВМ по заранее подготовленной программе.
Снятие всех ограничений на структуру управляющего устройства и законы управления. При этом показатели качества цифровых систем могут значительно превышать показатели качества управления непрерывных систем управления. Путем введения соответствующих программ могут быть реализованы сложные законы управления (оптимизация, адаптация, прогнозирование и др.), в том числе и такие, которые весьма сложно осуществить с помощью аналоговых средств. Появляется возможность решения интеллектуальных задач, обеспечивающих правильность и эффективность ведения технологических процессов. На основе микроЭВМ могут быть построены системы любых типов, включая системы с подчиненным управлением, многомерные системы с перекрестными связями и др.
Самодиагностика и самотестирование цифровых управляющих устройств. Возможность проверки исправности механических узлов привода, силовых преобразователей, датчиков и другого оборудования во время технологических пауз, т.е. автоматическая диагностика состояния оборудования и раннее предупреждение аварий. Эти возможности дополняются развитыми средствами борьбы с помехами. Главное здесь — замена аналоговых линий передачи информации цифровыми, содержащими гальванические развязки, волоконно-оптические каналы, помехоустойчивые интегральные микросхемы в качестве усилителей и коммутаторов.
Более высокая точность вследствие отсутствия дрейфа нуля, характерного для аналоговых устройств. Так, цифровые системы регулирования скорости электропривода могут обеспечить повышение точности регулирования на два порядка по сравнению с аналоговыми.
Простота визуализации параметров процесса управления путем применения цифровых индикаторов, индикаторных панелей и дисплеев, организации диалогового режима обмена информацией с оператором.
Большая надежность, меньшие габариты, масса и стоимость. Высокая надежность микроЭВМ по сравнению с аналоговой техникой обеспечивается применением больших интегральных микросхем (БИС), наличием специальных систем защиты памяти, помехозащищенности и другими средствами. Благодаря высокому уровню технологии производства БИС снижаются затраты на изготовление систем управления электроприводами. Эти преимущества особо проявляются при использовании одноплатных и однокристальных ЭВМ.