ГЛАВА 2
Средства регистрации дискретных сигналов и их возможности
2.1. СИСТЕМЫ РЕГИСТРАЦИИ НА МИКРОПРОЦЕССОРНОЙ БАЗЕ И ТРЕБОВАНИЯ К НИМ
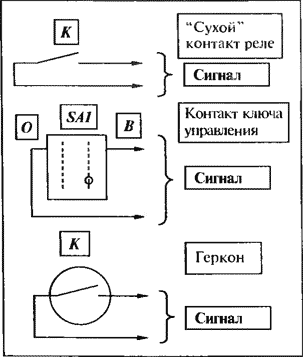
Рис. 2.1. Варианты датчиков системы регистрации
Одна из первоочередных задач АСУ ТП подстанции или электрической станции — регистрация функционирования устройств РЗАс помощью ЭВМ. Известны промышленные устройства (КАРС — “Энергосоюз”, г. Казань; КАРАТ. РАС, БМЦС — НТК “Механотроника”, г. С.-Петербург: Ремиконт— НПО “Системотехника”, г. Иваново) и разработки различных организаций в рамках информационных систем и систем телемеханики для этих целей. Основные принципы выполнения регистраторов на базе микропроцессорной техники рассмотрены в |5] Системы КАРС и КАРАТ разработаны достаточно давно и реализованы как автономные устройства без интеграции в систему АСУТП. Они формируют только протокол регистрации. Наиболее совершенными регистраторами являются цифровые осциллографы, но для регистрации большого количества дискретных сигналов они применяются редко из-за высокой стоимости. В качестве датчиков всех систем регистрации обычно используются “сухие контакты” реле и герконовые датчики, прикрепляемые к обмоткам реле (в основном указательных) и работающие от магнитного поля обмоток (рис. 2.1). Выпускаются специальные герконовые реле с обмотками тока и напряжения (например, фирмы “Свей”, г. Екатеринбург).
Эти реле выполняются в габаритах клемм и размещаются в стандартных клеммниках.
Имеются разработки, предполагающие установку датчиков и в цепях постоянного тока защит (например, для контроля функционирования пусковых и измерительных органов защит при внешних КЗ). Использование “сухих контактов” или герконовых датчиков практически не сказывается на функционировании самих защит.
Информация об изменении состояния контактов и герконов собирается в саму ЭВМ или в специализированную микроЭВМ — контроллер. Информация с большой точностью “привязывается” во времени. Практически для объектов с U< 220 кВ целесообразна фиксация событий с точностью 0,005 — 0,02 с. При этом фиксируются времена замыкания и размыкания контакта, т.е. становится известен интервал протекания тока через обмотку. При многократном срабатывании устройства фиксируются все интервалы.
В ходе аварии и после ее окончания возможно получение печатных протоколов. Возможна передача информации и протоколов в ЭВМ более высокого уровня диспетчерского управления. Таким образом, сведения получают объективный, документированный характер с регистрацией последовательности событий во времени. Возможно получение информации на нескольких уровнях управления в темпе аварийного процесса.
Кроме того, фиксируется положение выключателей. Для этого могут использоваться либо вспомогательные контакты выключателей, либо контакты реле положения. Для выключателей с пофазным приводом целесообразно использовать контакты реле контроля непереключения фаз. У воздушных выключателей возможно использование контактов реле давления воздуха. Результаты могут использоваться для получения данных о состоянии и ресурсе выключателя. Имеется опыт оснащения магнитами и герконами таких элементов, как накладки, испытательные блоки, переключатели.
После частичной логической обработки результата функционирования задачи регистрации информация может быть использована для следующей задачи — анализа аварийной ситуации.
При разработке требований к системе регистрации дискретных событий необходимо учитывать ряд особенностей:
достаточно большое количество источников информации, в качестве которых вы ступают контакты реле или герконы. Для типичного объекта 110, 220 кВ число контактов составляет 500 — 2000. Контакты рассредоточены по объекту;
точность, с которой необходимо фиксировать временные интервалы, составляет 5 — 20 мс.
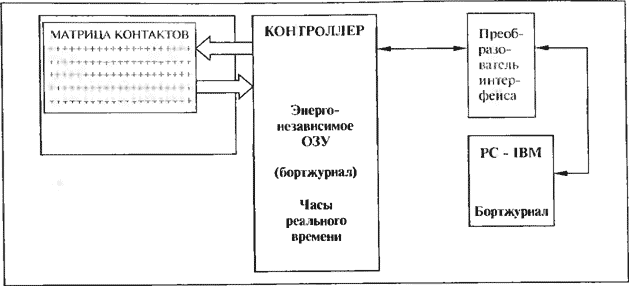
Рис. 2.2. Конфигурация системы регистрации
Большинство электромеханических реле имеют “дребезг" контактов, соизмеримый с точностью фиксации; удаленность центра приема и представления информации от объекта; максимально возможная быстрота предоставления информации, так как она необходима для ускорения ликвидации последствий аварии: необходимость представления информации в удобной для персонала форме:
возможность получения печатных протоколов и архивов; доступность полученной информации для любых программ из состава АСУ ТП.
Система регистрации для энергообъекта средних размеров, как правило, имеет конфигурацию, приведенную на рис. 2.2. Контакты датчиков целесообразно объединять в матрицу, что существенно уменьшает количество кабельных связей по сравнению с вариантом подключения каждого контакта к входу контроллера. Непосредственно сбором информации о положении датчиков (контактов) ведает контроллер. Он решает две задачи:
освобождает ЭВМ от необходимости вести непрерывный опрос датчиков;
уменьшает количество кабельных связей, так как сам контроллер (или несколько) могут устанавливаться вблизи панелей РЗА.
Известны системы регистрации, выполненные на одной ЭВМ (без контроллера), но ниже этот вариант не рассматривается.
Система должна регистрировать действия устройств РЗА по факту появления и исчезновения тока в обмотках реле. Наиболее часто эго указательные реле (РУ), контакты которых имеют механический возврат. Для фиксации исчезновения поля в таких реле, как уже указывалось, их снабжают герконами. которые в новых типах указательных реле уже установлены. На существующих РУ (типа РУ-21, БРУ) герконы типа КЭМ-2, или аналогичные, можно прикрепить к обмотке резиновыми кольцами или клеем. Вместо герконов можно использовать магниточувствительные микросхемы. И те, и другие обеспечивают гальваническую развязку цепей сбора информации и цепей РЗА. При использовании промежуточных или других типов электромеханических реле (со срабатыванием и возвратом контактов) возможно использование “сухих” контактов этих реле (для обеспечения гальванической развязки). При этом необходимо отметить, что использование герконов предпочтительнее “сухих” контактов, благодаря их более высокой надежности и практическому отсутствию “дребезга”, характерного для контактов реле.
Требования к быстроте опроса контактных (герконовых) датчиков во многом определяют необходимую производительность процессоров контроллеров, использующихся для этой цели. Так восьмиразрядный контроллер с процессором Intel 8080 может обеспечить опрос 32 χ 32 контактов с дискретностью 5—10 мс, что является достаточным для большего количества объектов. Часто целесообразно на объекте устанавливать несколько контроллеров, так как панели с устройствами РЗА могут располагаться в отдельных, удаленных друг от друга помещениях. Использование одного контроллера для различных помещений значительно увеличивает объем, а следовательно, и стоимость кабельной продукции.
Практически система не критична к типу контроллера, так как большинство контроллеров позволяет увеличивать до нужного уровня число параллельных портов ввода-вывода. Обязательно только наличие гальванической развязки по всем портам. В дальнейшем рассматривается “средний” контроллер для регистрации дискретных событий.
Объем требуемого ПЗУ (без учета монитора контроллера) порядка 2 Кбайт. Объем требуемого ОЗУ примерно 2 Кбайт, из них 512 байт для работы программ, остальное пространство для хранения информации об авариях. При полном заполнении пространства ОЗУ контроллера, информация о последней аварии начинает вытеснять информацию о наиболее ранних авариях. Такой принцип хранения информации позволяет использовать контроллер для фиксации аварий даже при долговременном отсутствии связи с ЭВМ. После передачи информации в ЭВМ ОЗУ контроллера, занятое переданной информацией, считается свободным.
Во время аварии энергообъекты могут полностью терять питание. По этой причине желательно иметь для контроллера систему бесперебойного питания или, как минимум, автономное питание ОЗУ (аккумуляторы). Правда в последнем случае информация об аварии не будет полностью зафиксирована. Как правило, удается обеспечить питание контроллера от двух трансформаторов собственных нужд, подключенных к разным секциям или системам шин.
При восстановлении питания контроллер должен автоматически вернуться в режим опроса датчиков, а накопленная до отключения информация должна быть проверена и. если признана достоверной, то сохранена и потом передана в ЭВМ.
Требования к ЭВМ, определяемые данной задачей, не являются жесткими. ЭВМ должна иметь дисплей, принтер, дисковую память и, хотя бы один, последовательный интерфейс для связи с контроллером. На практике используются ЭВМ типа IBM-PC или “большие” ЭВМ, решающие комплекс задач АСУ.
Для данной задачи были сформулированы следующие требования к ЭВМ:
ЭВМ может не работать в круглосуточном режиме;
ЭВМ должна обеспечивать регистрацию принятой от контроллера и обработанной информации на диск и принтер, вывод на дисплей протоколов по запросу пользователя;
полученная информация должна быть доступна другими задачам АСУ ТП;
на ЭВМ желательно иметь “службу астрономического времени” для “привязки” относительного времени, фиксированного контроллером.
Последнее требование не является простым, хотя многие ЭВМ (IBM PC/AT) имеют встроенные энергонезависимые часы. Это связано с тем, что если авария затрагивает несколько объектов, например две подстанции по концам одной ЛЭП, то показания вЭВМ на этих подстанциях должны совпадать с точностью, на порядок большей, чем время фиксации событий (т.е. 0,5 — 2 мс). Обычно такая задача решается на уровне сетевого времени, если ЭВМ объединены в сеть, или специальными устройствами типа часов с коррекцией по сигналам точного времени, связанных с ЭВМ.
Далее под относительным временем понимается время фиксируемого события, которое за нулевую отметку считает время первого события в данной аварии.
На небольших объектах режим работы ЭВМ может быть организован по принципу “включение по необходимости”. Этот режим обеспечивается использованием специального сигнала от контроллера, который сообщает о наличии информации для передачи ЭВМ. При получении сигнала персонал включает ЭВМ, которая принимает информацию от контроллера, архивирует на диск и выводит протоколы на принтер и дисплей. На объектах, где персонал появляется периодически, может быть использован режим с включением ЭВМ при появлении персонала. Объем ОЗУ контроллера должен позволять сохранять информации в числе событий. Определение этого объема (ОЗУ) целесообразно производить на тренажере задачи, который позволяет моделировать реальные ситуации. Ориентировочно можно считать, что для объекта 110, 220 кВ имеющего шесть — семь ЛЭП и один — два трансформатора на одну аварию на НЭП требуется 50 — 100 байт.
Основное требование к ОЗУ контроллера — объем не менее 1 Кбайт. При таком объеме ОЗУ контроллера (512 для служебных целей) в нем можно хранить 5—10 аварий, что во многих случаях может оказаться достаточным.
Кроме указанных требований, весьма желательно иметь контроллер вместе с блоком питания в виде закрытой законченной конструкции, как это принято и для устройств РЗА.
Требования к выполнению монтажа и их исполнение в большой степени определяют качество системы регистрации. Принципиальная схема системы регистрации (рис. 2.2) включает традиционную схему опроса контактных датчиков с гальванической развязкой и уровнем тока 20 мА.
Обычно используется диодно-контактная матрица (размером не более 32 х 32). Связь между контроллером и ЭВМ осуществляется по двух- или четырехпроводной линии через последовательный интерфейс ИРПС, преобразуемый вблизи компьютера в RS-232. Основной проблемой является выполнение связей, образующих матрицу опроса. Это обусловлено пространственной рассредоточенностью панелей РЗА, на которых располагаются контактные датчики.
Возможны два основных варианта выполнения кабельных связей — радиальный и шинный или их комбинация. Используемый кабель — контрольный или телефонный. Так как контрольный кабель с большим числом жил является дорогой продукцией, а его сечение (выбираемое по механической прочности) практически не используется, более целесообразным представляется использование телефонного кабеля. При выполнении монтажа на действующем объекте прокладка телефонного кабеля в кабельном канале (или кабельном полуэтаже) затруднена. В этом случае используется прокладка телефонного кабеля по верху панелей. Для выполнения спуска к сборке выводов герконов применяются двусторонние печатные платы. Этот вариант используется для шинной схемы кабельных связей. В такой схеме обеспечивается минимальный расход кабеля.
Следующее требование к системе — тестирование. Это требование касается как аппаратной, так и программной части. Тестирование всего комплекса контроллер — ЭВМ осуществляется программными средствами, например принудительным пуском всей задачи при фиксированных состояниях портов ввода-вывода. Наиболее просто это выполнить, отключив разъем портов ввода-вывода. При этом контроллер фиксирует и передает в ЭВМ известную информацию (все 0 или все 1).
Более трудную задачу представляет тестирование правильности монтажа. При большом количестве контактных датчиков (герконов) наиболее вероятной ошибкой является несоответствие требуемого и действительного положения датчика или группы датчиков. Эта ошибка может диагностироваться программно-аппаратными средствами. Так, если поднести постоянный магнит к геркону при введенной в действие системе, появится сообщение на дисплее ЭВМ, по которому можно определить правильность подключения.
Исправить ошибку можно двумя путями — аппаратно или программно. Аппаратное исправление осуществляется переключением датчика в соответствии с технической документацией, программное — путем редактирования сообщений, отражающих положение датчика. При программном исправлении автоматически фиксируется соответствие датчика и текста, соответствующего ему сообщения.
Еще одно требование — последовательность выполнения работ. Это требование связано с тем, что контроллер и ЭВМ могут в значительной степени облегчить проверку и наладку системы. Кроме того, задача может быть введена в эксплуатацию с любым количеством датчиков, т.е. намного раньше, чем будут полностью закончены монтажные работы по датчикам и кабельным связям. Опытная эксплуатация позволит выявить нерешенные вопросы и принять меры по их устранению. Рекомендуемый порядок монтажа следующий: сначала монтаж контроллера и ЭВМ, затем монтаж датчиков, кабелей, разъемов и т.д. До этого должно быть готово программное обеспечение контроллера и ЭВМ. Оборудование для шинной разводки может быть подготовлено заранее, благодаря стандартным размерам панелей РЗА.
Автоматизированный анализ аварийных ситуаций энергосистем - Средства регистрации дискретных сигналов
- Подробности
- Категория: РЗАиА
Содержание материала
Страница 3 из 14