
Движение вперёд
Синхронные двигатели с регулируемыми приводами, повышают эффективность производственных процессов
ХАЙНЦ ЛЕНДЕНМАНН, РЕЗА Р. МОХАДДАМ, АРИ ТАММИ, ЛАРС-ЭРИК ТАНД - Электродвигатели потребляют приблизительно 60-65 процентов от всего электричества, используемого в промышленности. Более эффективное использование энергии посредством повышения эффективности работы двигателя является ключевым моментом в оптимизации двигателей. Основная экономия электроэнергии достигается с помощью приводов с регулируемой скоростью вращения, и на сегодняшний день эта технология используется уже в 30-40 процентах от всех установленных за последнее время двигателей. Использование и стабильные инвестиции также требуют повышенной надёжности и более длительного срока службы двигателя. Обтекаемая конструкция ротора синхронных реактивных двигателей концерна АББ устраняет потери в клетке ротора, таким образом увеличивая эффективность и компактность двигателя. Возможность достижения стандартного уровня мощности и крутящего момента с помощью простого повышения температуры класса-A (60 K) продлевает срок службы изоляции двигателя, подшипников или интервалов смазки двигателя.

Возможность работы на высоких скоростях помогает устранить элементы механической трансмиссии, такие как, например, редукторы.
Электродвигатели широко применяются в промышленности. Синхронные реактивные двигатели АББ меньше по габаритам, что позволяет машиностроителям проектировать более компактное, лёгкое и эффективное оборудование. Кроме того, возможность работы на высоких скоростях помогает устранить элементы механической трансмиссии, такие как, редукторы. Всё это, в конечном счете, позволяет осуществить интеграцию двигателя и погрузочного оборудования, всё больше и больше востребованную на сегодняшний день. Чтобы удовлетворить спрос на более эффективный и компактный двигатель с повышенным сроком службы и сниженными требованиями к обслуживанию с помощью нового типа двигателя, который также будет отлично подходить к приводу с регулируемой скоростью вращения, (VSD), концерн АББ радикально пересмотрел все технологические варианты. Запуск двигателя VSD сильно отличается по сравнению с прямым пуском от сети. Это и другие изменения в граничных условиях выдвинули на первый план потенциальные возможности упростить дизайн двигателя и повысить его эффективность. Один хорошо известный подход состоит в использовании синхронных двигателей (СМ). СМ с четырёхполюсным ротором, работающим на частоте 50 Гц, вращается синхронно с источником тока со скоростью ровно 1500 оборотов в минуту. Соответствующий индукционный двигатель (IM), тем не менее, испытывает потери за счёт скольжения, и вращается на скорости только 1475 оборотов в минуту при взятом в качестве примера напряжении 30 кВ. В современных IM с короткозамкнутой клеткой ротора, потери, связанные с ротором, составляют 20-35 процентов от всех потерь двигателя. Синхронное вращение устраняет большинство таких потерь.
Устранение х вызванных скольжением потерь ведёт к повышению эффективности примерно от 0,6 процента (двигатель на 220 кВт) до 8 процентов (для 3 кВт), а также к повышению мощности двигателя и плотности крутящего момента на 20-40 процентов для такого же класса теплостойкости изоляции.
Синхронные двигатели поставляются в различном исполнении: двухобмоточный с бесщёточными возбудителями; двигатель с постоянным магнитом (РМ); двигатель, основанный на принципе магнитного сопротивления (часто называемый синхронным реактивным двигателем или Syn-RM). У ротора SynRM нет ни проводящей короткозамкнутой клетки, как и в случае с IM, ни постоянных магнитов, ни обмотки возбуждения поля. Вместо этого используется принцип магнитного сопротивления.
Синхронный реактивный двигатель
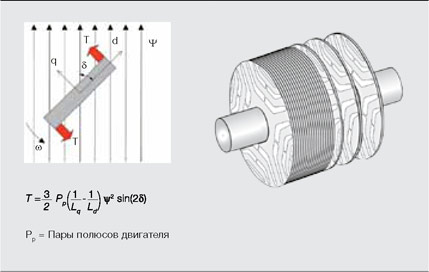
Магнитное сопротивление является магнитным эквивалентом сопротивления в электрических цепях. Ротор состоит из одного направления наименее возможного магнитного сопротивления (d) и перпендикулярного направления (q) с высоким магнитным сопротивлением или хорошей магнитной «изоляцией» рис. 1. Крутящий момент создаётся, поскольку ротор пытается выровнять магнитное проводящее направление по полю статора. Величина полученного крутящего момента напрямую связана с соотношением между частями полюсного деления, т. е. коэффициентом индуктивности между двумя направлениями намагничивания ротора. Изобретение концепции синхронного реактивного двигателя датируется 1923 годом. Тем не менее, промышленный выпуск этого типа двигателя так и не был начат преимущественно из-за нехватки мощности для прямого запуска. Сегодня, с помощью контроллеров с регулируемой скоростью, это препятствие устранено рис. 2.
1 Синхронный реактивный двигатель и принцип крутящего момента
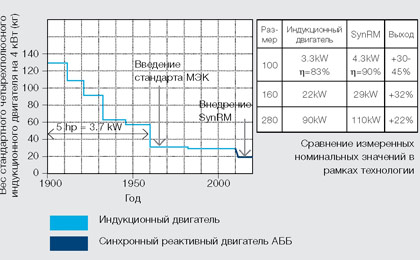
2 Срок реализации инноваций в двигателях низкого напряжения
В 1982 году были открыты постоянные магниты на основе неодима, железа и бора (NdFeB). В результате для серводвигателей была принята новая технология с применением постоянного магнита (РМ), которая на сегодняшний день появляется во многих промышленных применениях, таких как безредукторные низкоскоростные моментные двигатели [1]. И вновь слишком мало внимания было уделено незатейливому двигателю типа SynRM.
Для малых двигателей на 3-4 кВт свыше 60 процентов энергии может получаться при таком же повышении температуры.
Кроме того, не все ранее опубликованные работы по SynRM преуспели в том, чтобы продемонстрировать превосходящую силу крутящего момента или более высокую эффективность в сравнении с IM, как ожидалось на основе вычислений: факт, упомянутый экспертами и учёными для объяснения того, почему двигатель SynRM используется сегодня столь редко. По-видимому, эти прежние результаты были следствием недостаточной оптимизации работы преобразователя. Действительно, в некоторых публикациях были продемонстрированы весьма многообещающие результаты, и в них более подробно изучались электромагнитные аспекты проекта [2], [3]. Важно отметить отличие SynRM от двигателя с переключаемым сопротивлением, или шаговым двигателем с абсолютно другим статором, концепцией обмотки и несинусоидальными волнами тока; двигатель часто считался неподходящим для промышленного использования из-за высокого уровня шума. Упоминавшимся недостатком SynRM является высокая потребность в токе при таком же крутящем моменте, как и у двигателя PM, поскольку ротор должен намагничиваться через статор. Тем не менее, коэффициент мощности, как видно из сети, определяется преобразователем энергии и он примерно одинаков во всех эксплуатационных режимах, даже для SynRM.
Промышленный двигатель для систем VSD
В проекте ротора и управлении привода двигателя ABB SynRM, ток двигателя, обратно пропорциональный коэффициентам мощности и полезного действия, 1/(n*cos(p)), фактически ниже, чем у небольшого индукционного двигателя с таким же крутящим моментом и скоростью вращения, в основном из-за значительного выигрыша в производительности. Только для больших двигателей ток в преобразователе выше, чем у IM с таким же крутящим моментом. В целом, двигатель ABB SynRM работает с таким же типоразмером привода (например,
ACS850), как и IM с такими же мощностью и крутящим моментом, хотя и при повышенной удельной мощности и с более высоким КПД в сравнении с IM. Повышение КПД двигателя преобразуется в практически одинаковое энергосбережение на уровне привода.
Другим основным преимуществом двигателя АВВ SynRM является простая конструкция ротора. Лишённая магнитов и клетки, конструкция ротора является более надёжной в сравнении с IM или РМ. Кроме того, отсутствует риск постоянных потерь производительности из-за возможного размагничивания в случае отказа или перегрева. Двигатель изначально безопасен в эксплуатации, так как, не имея магнитов, не индуцируется никакая противоэлектродвижущая сила, и защита преобразователя от перенапряжения становится излишней. Наконец, редкоземельные материалы для постоянных магнитов относительно дороги, и их поставки на некоторые рынки могут быть ограничены из-за географического местоположения основных поставщиков сырья.
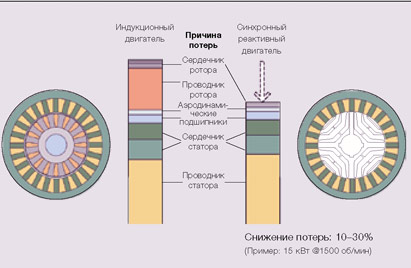
Устранение большинства потерь в роторе и его обтекаемая конструкция дают ряд преимуществ, как самому двигателю, так и связанному с ним оборудованию рис. 3. Двигатель, оснащённый этой технологией, можно эксплуатировать с определённым стандартами МЭК уровнем мощности для данного типоразмера. В этом случае, выигрыш в производительности с технологией VSD варьируется в диапазоне от 5 процентов для однокиловаттных двигателей до приблизительно 0,5 процентов для самых больших двигателей (типоразмер 315).
3 Распределение потерь и эффективность
Следовательно, там, где IM работал бы при повышении температуры до F-класса (105 K), АВВ SynRM работает всего лишь при повышении температуры до А-класса (60 K) рис. 4. Для сравнения, при работе с компрессором со скоростью вращения 4500 оборотов в минуту, двигатель АВВ SynRM показывает ещё более низкую температуру подшипника при работе с фактическим повышением до Н-класса (125 K) в сравнении с более крупным IM, работающим при повышении до F-класса (105 K). Поэтому такой двигатель был также назван «холодным» рис. 5. Такая работа с низкой температурой продлевает срок службы изоляции двигателя, подшипников или интервалы смазки. В частности, подшипники двигателя требуют и регулярного обслуживания, и в соответствии с некоторыми исследованиями отказ подшипников является основной причиной примерно 70 процентов незапланированных выходов двигателя из строя. Сниженная температура подшипников непосредственно продлевает интервалы смазки, уменьшает объём обслуживания и повышает надёжность. Даже если подшипник в конце концов потребует замены, отсутствие магнитной силы, в отличие от двигателя РМ, сделает замену такой же простой, как и в случае с IM. Технология обеспечивает эффективное использование крутящего момента на более высоких скоростях. При других применениях этой технологии, в работе часто поддерживается обычная температура B- или F-класса. Так как особенно тяжело игнорировать потери на роторе, если сравнивать с потерями на статоре, их практическое устранение оказало значительное влияние на эффективность вращающего момента. Для маломощных двигателей на 3 или 4 кВт, может быть получено на целых 60 процентов больше энергии при том же самом повышении температуры. Для двигателя на 60 кВт выгода составляет примерно 40 процентов, а для двигателя на 220 кВт - 20 процентов по сравнению с IM. В большинстве случаев, одинаковый объём энергии может быть получен от двигателя, который на один или иногда на два типоразмера меньше, чем IM. Уменьшение площади основания заметно для всех применений, в которых могут использоваться конструкции меньшей высоты и более компактные двигатели. Дополнительный выигрыш - уменьшенная тепловая нагрузка на соседние компоненты, особенно в закрытых электрошкафах. Даже с этой значительно увеличенной удельной мощностью, ещё одно важное преимущество вытекает из устранения потерь на роторе: так как большая часть теплопередачи через вал ликвидирована, температура подшипника, особенно на приводном конце, уменьшается. Если сравнивать АВВ SynRM с IM на 6 кВт, это уменьшение составляет 30 K, с приблизительным сокращением от 15 до 20 K, типичным для всего спектра двигателей.
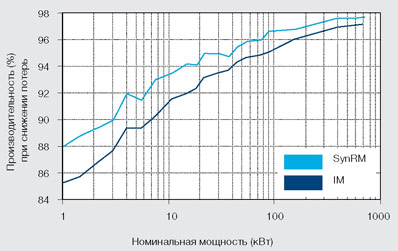
Этот эффект особенно заметен на более высоких скоростях, а также при эксплуатации при более высоких классах температуры. Эта в целом высокая производительность сохраняется даже при таком высоком выходном уровне. Кроме того, у АВВ SynRM отличная кривая КПД при частичной нагрузке, которая типична для синхронных двигателей, то есть эффективность остаётся высокой даже при частичной нагрузке, что особенно ценится в приводах VSD для вентиляторов и насосов.
Наконец, эти роторы показывают приблизительно 30 - 50-процентное снижение инерции из-за отсутствия клетки и магнитов. В самых динамических применениях, таких как подъёмные краны, такое снижение означает дальнейшие преимущества в энергоэффективности, а также ускоренные циклы подъёма благодаря более высокой скорости отслеживания графика нагрузки.
Работа с низкой температурой продлевает срок службы изоляции двигателя, подшипников или интервалы смазки.
Конструкция ротора и её надёжность
Большинство технических аспектов систем привода АВВ SynRMs непосредственно основано на существующей технологии. Корпус, клеммная коробка, статор, дизайн и технология обмотки, а также варианты подшипников идентичны IM. Поскольку 3-х фазный ток является синусоидальным, приводы тех же типов могут управлять этим типом двигателя, если программируемое оборудование оптимизировано и включает этот тип двигателя. Отличается только ротор.
Ротор не такой сложный, как в IM и PM. Слоистые панели из электрической стали закреплены на валу, а сложность заключается в самом проекте.
Температура окружающей среды - это температура воздуха, окружающего двигатель. Это пороговое значение или температура, которую должен иметь полностью отключенный и остывший двигатель.
Повышение температуры - это изменение в двигателе, работающем с предельной нагрузкой. Различие между пусковой температурой двигателя и его конечной повышенной температурой является повышением температуры двигателя.

Стандартный метод измерения повышения температуры включает замер различия между холодным и горячим активным сопротивлением обмотки. Это даёт среднее изменение температуры всей обмотки, включая соединительные провода двигателя, лобовые части обмотки статора и проводку, расположенную глубоко в пазах статора. Так как некоторые из этих точек нагреваются сильнее других, при расчёте коэффициента допуска используется средняя температура, чтобы показать вероятную температуру в самой нагретой точке.
Такой допуск известен как «допуск на температуру в самой нагретой точке». Виды изоляции разбиваются на классы в соответствии с её сопротивлением термическому старению и отказам.
Четыре общих класса изоляции обозначаются литерами A, B, F или H. Температурные свойства каждого класса - это максимальная температура, при которой изоляция может обеспечить средний срок службы продолжительностью 20 000 часов.
Эксплуатация двигателя при пониженном росте температуры в сравнении с разрешённым в рамках соответствующего класса изоляции может изменить теплоёмкость двигателя, что позволит ему выдерживать температуру окружающей среды выше обычной; при этом срок службы двигателя увеличивается.
На графике ниже показаны номинальные значения температур, допуски роста температур и допуски на температуру в самой нагретой точке для стандартного двигателя в различных корпусах.
Состояния привода насосов, вентиляторов, компрессоров, кранов и горнодобывающих механизмов были смоделированы с помощью метода испытаний под форсированной нагрузкой (HAST).
Интенсивное моделирование методом конечных элементов (FEM) использовалось для того, чтобы тщательно спроектировать поперечное сечение в том, что касается электрических и механических свойств. Важным выбором в ходе проектирования стали количество магнитных сегментов и точная форма воздушных барьеров, что определяет силу крутящего момента и ток намагничивания двигателя. Минимизация этого реактивного тока была критически важной для поддержания предпочтительной номинальной мощности привода. Точное размещение сегментов вдоль периферии существенно для создания плавного крутящего момента во время вращения, снижая, таким образом, уровень шума в сравнении с обычными двигателями. Одним из результатов этой комплексной оптимизации с использованием FEM, аналитических и генетических алгоритмов, состоял в том, что было установлено, что конфигурация с 4 полюсами лучше всего подходит для всего спектра скоростей вплоть до 6000 оборотов в минуту.
Чтобы проверить надёжность нового ротора, в течение всего этапа разработки проводились интенсивные испытания системы привода и двигателя (см. заглавный рисунок, страницы 56-57). Условия привода насосов, вентиляторов, компрессоров, кранов и горнодобывающих механизмов были смоделированы с помощью метода испытаний под форсированной нагрузкой (HAST). Циклы HAST были спроектированы специально для этого двигателя, чтобы гарантировать надёжную работу в течение всего срока эксплуатации. Например, в ходе одного успешного эксперимента, проводимого с высокой частотой повторения, двигатель запускался и выключался на скорости выше допустимых по каталогу значений. Счёт рабочих циклов и условия перегрузки были рассчитаны таким образом, чтобы соответствовать более чем 20-летнему сроку эксплуатации при соблюдении номинальных значений.
Преобразователь и управление привода
Обычная технология приводов АББ, используемая для двигателей IM и РМ со стандартным прямым управлением крутящим моментом (DTC), была адаптирована для применения в SynRM в качестве нового типа двигателя. Несмотря на множество общих характеристик с двигателем РМ, за исключением нулевого потока ротора, основной акцент в ходе разработок был сделан на оптимизацию силы крутящего момента посредством управления максимальным крутящим моментом в расчёте на ампер (MTPA). Это гарантирует сохранение минимального тока двигателя в каждом рабочем режиме. Управление также включает возможности для диапазона ослабления поля, т. е. диапазона скоростей, превышающих номинальную скорость. Максимальная расчётная скорость в полтора раза выше номинальной может быть достигнута для большей части диапазона режимов работы двигателя. Это управление приводом является особенно важным результатом для АББ, так как оно позволяет двигателю SynRM достичь заметно более высокой интенсивности крутящего момента, чем у IM.
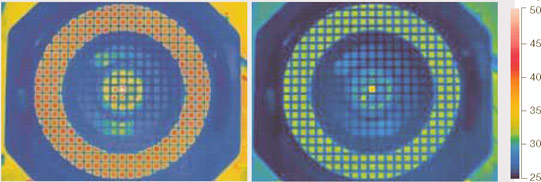
Индукционный двигатель
Синхронный реактивный двигатель
VSD. Стандартный IM, оснащённый новым ротором в сочетании со стандартным приводом с новым программным обеспечением, привёл к созданию высокопроизводительной и высокоэффективной системы VSD. Характеристики производительности и эффективности сравнимы с приводом двигателя РМ, но использование технологий, связанных с надёжным индукционным двигателем, позволяют использовать преимущества двигателей обоих типов.
Дополнительным преимуществом является снижение тепловой нагрузки на соседние части, особенно в закрытых электрошкафах.
6 Рабочие характеристики привода двигателя для моделирования
Рабочие характеристики новой системы привода двигателя даны для трёх типоразмеров двигателя согласно МЭК | ||||||||||||
Двигатель, рост температуры класса F | Привод, 400 В | |||||||||||
размер | PN | nN | PN | nmax | Eff | TN | MM | Код типа | IN | Шум | Типо | MD |
100 | 4 | 1500 | 4 | 2250 | 84.3 | 25 | 22 | 010A-5 | 10.5 | 39 | B | 5 |
100 | 7.5 | 3000 | 7.5 | 4500 | 88.7 | 23 | 22 | 018A-5 | 18 | 39 | B | 5 |
100 | 13 | 4500 | 13 | 6000 | 90.5 | 27 | 22 | 030A-5 | 30 | 63 | C | 16 |
100 | 17.5 | 6000 | 17.5 | 6000 | 91.3 | 27 | 22 | 044A-5 | 44 | 71 | C | 16 |
160 | 26 | 1500 | 26 | 2250 | 91.7 | 165 | 180 | 061A-5 | 61 | 70 | D | 23 |
160 | 50 | 3000 | 50 | 4500 | 94.0 | 159 | 180 | 144A-5 | 144 | 65 | E0 | 35 |
160 | 70 | 4500 | 70 | 5300 | 94.6 | 148 | 180 | 166A-5 | 166 | 65 | E | 67 |
280 | 110 | 1500 | 110 | 1800 | 96.0 | 700 | 640 | 260A-5 | 260 | 65 | E | 67 |
280 | 130 | 1800 | 130 | 2200 | 95.9 | 689 | 640 | 290A-5 | 290 | 65 | E | 67 |
Более подробную спецификацию смотрите на сайте АББ: www.abb.com/motors&generators | ||||||||||||
Установка и эксплуатация электродвигательного привода для данного двигателя не отличаются от привода VSD с двигателями IM или РМ. Стандартные особенности включают автоматическую идентификацию параметров, основанную на значениях заводской таблички и работу без применения датчиков. Двигатель не нуждается ни в каких датчиках скорости, но, тем не менее, он может поддерживать высокую точность скорости, а также высокую динамику крутящего момента. Размеры привода могут быть заданы даже для специально указанной перегрузки и допустимой нагрузки в течение цикла.
Обзор эксплуатационных характеристик
Поскольку такому двигателю, как PM, требуется привод VSD, подходящие пары двигатель-привод ACS рекомендованы для широкого спектра мощности и скорости рис. 6.
В качестве ответа на основные тенденции, господствующие на рынке, например, повышенную производительность, эффективность, увеличение интервалов обслуживания и снижение площади основания, компания выпустила на рынок полностью новый двигатель, отлично подходящий к системам VSD. Была достигнута повышенная на 20-40% удельная мощность в сравнении с IM, с конструкцией ротора без короткозамкнутой клетки и без постоянных магнитов, меньшие габариты с меньшим теплообразованием и самой высокой эффективностью для систем
Хайнц Ленденманн Реза Раджаби Мохаддам
Корпоративный исследовательский центр, Весте- рос, Швеция
heinz.lendenmann@se.abb.com
reza.r.moghaddam@se.abb.com
Ари Тамми
АББ Отдел дискретной автоматизации и движения, двигатели и генераторы, Вааса, Финляндия ari.tammi@fi.abb.com
Ларс-Эрик Танд
АББ Отдел дискретной автоматизации и движения, двигатели и генераторы, Вестерос, Швеция lars-erik.thand@se.abb.com
Литература
- Haikola, M. Без редукторов: решение прямого привода, разработанное концерном АББ, успешно отвечает требованиям растущего глобального спроса. «АББ Ревю» 4/2009, 12-15.
- Boglietti, A., Cavagnino, A. Pastorelli, M., Vagati,
A., Экспериментальное сравнение рабочих характеристик индукционного и синхронного реактивного двигателей, протокол ежегодного заседания на 40-й конференции IEEE IAS, октябрь 2005, вып. 1, стр. 474-479.
- Germishuizen, J. J., Van der Merwe, F. S., Van der Westhuizen, K., Kamper, M. J., Сравнение рабочих характеристик синхронного реактивного и индукционного приводов для электропоездов, протокол ежегодного заседания на конференции IEEE IAS, 8-12 октября 2000 г., вып. 1, стр. 316-323.
Заглавный рисунок
Система двигатель-привод проходит испытания под форсированной нагрузкой (HAST)