Асинхронные управляемые двигатели.
Управляемые двухфазные асинхронные двигатели малой мощности широко применяются в точных приборных и следящих системах, в счетно-решающих устройствах. Они используются и в качестве исполнительных двигателей (ИД) автоматических устройств промышленного назначения малой мощности. Назначение ИД — преобразование электрического сигнала (чаще всего напряжения управления) в механическое перемещение вала.
Асинхронные исполнительные двигатели выполняются мощностью от сотых долей ватта до нескольких сотен ватт как для стандартной (50 Гц), так и для повышенных (200, 400, 500 и 1000 Гц) частот при синхронной скорости вращения от 1500 до 30 000 об/мин (от 157 до 3141 рад/с). Статор двухфазный. Ротор асинхронного ИД может иметь следующие конструктивные модификации:
• полый немагнитный (с внутренним статором из листовой электротехнической стали);
обычный с обмоткой типа «беличья клетка»;
полый или сплошной ферромагнитный с немагнитным покрытием или без него.
Первый тип двигателя обеспечивает требуемые характеристики при высоком быстродействии, достигаемом за счет пониженного момента инерции ротора. Полый немагнитный ротор, по существу, представляет собой сплошную вторичную обмотку, механически отделенную от вторичного ферромагнитного сердечника, который служит для уменьшения сопротивления магнитной цепи двигателя. Выполняется обычно из алюминия и его сплавов. К числу других достоинств двигателей с полым немагнитным ротором относятся также высокая чувствительность (работа от малого сигнала), плавный и бесшумный ход из-за отсутствия зубцов ротора.
Важно также отметить, что в этом двигателе отсутствуют добавочные синхронные и реактивные моменты. К числу его основных достоинств относится малый момент инерции ротора. Конструктивная схема исполнительного двигателя с полым немагнитным ротором представлена на зазоре между внешним 2 и внутренним 3 магнитопровода запрессованного в корпус 4, размещаются обмотки управления и возбуждения 5. Внутренний магнитопровод укрепляется на консоли крышки 6. Вал 7, несущий полый ротор, опирается на подшипник 8.
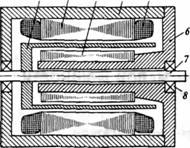
Конструктивная схема асинхронного управляемого двигателя с полым ротором
Главный недостаток ИД с полым ротором — большой немагнитный зазор, складывающийся из двух воздушных зазоров и толщины самого ротора (0,1—0,8 мм). Возрастают намагничивающий ток и реактивная мощность, расходуемые на создание магнитного поля, уменьшаются cosφ и КПД.
Для полезных мощностей от долей до нескольких ватт наилучшие массогабаритные и динамические показатели имеют двигатели с обычным короткозамкнутым ротором типа «беличья клетка».
Исполнительные асинхронные двигатели с обмоткой на роторе типа «беличьей клетки» по сравнению с обычными асинхронными двигателями имеют следующие особенности:
малый диаметр и большая длина ротора, (это позволяет получить приемлемый момент инерции);
минимально возможный зазор между статором и ротором 30— 50 мкм (в целях уменьшения намагничивающего тока);
большое для машин малой мощности число периодов поля р = = 2-И (для увеличения быстродействия);
скос на одно зубцовое деление (в целях уменьшения добавочных моментов).
Кроме того, в этих двигателях для обеспечения интенсивного торможения при отключении управляющего сигнала иногда применяются встроенные электромагнитные демпферы. Наиболее просто устроен демпфер, в котором демпфирующий момент образуется при вращении дополнительного полого ротора из алюминиевого сплава в поле постоянных магнитов.
Двигатели с полым ферромагнитным ротором уступают по ряду показателей управляемым двигателям с короткозамкнутым и с полым немагнитным ротором. Это, естественно, ограничивает их применение.
В некоторых автоматических устройствах требуются управляемые двигатели, ротор которых не вращается, а поворачивается на небольшой угол, пропорциональный моменту двигателя и напряжению обмотки управления. Управляемые двигатели, предназначенные для работы в таком специфическом режиме, называются моментными.
Двухфазные асинхронные ИД применяются в маломощной (приборной) автоматике. Для привода промышленных механизмов большей мощности (силовая автоматика) — до десятков тысяч киловатт — используются управляемые двигатели других конструкций и принципов регулирования скорости. В настоящее время в связи с развитием полупроводниковой техники наибольшее применение получают способы регулирования скорости, основанные на использовании управляемых полупроводниковых преобразователей. В электроприводе переменного тока чаще других применяются:
система «преобразователь частоты — двигатель», в преобразовательном устройстве которой применяется регулируемый преобразователь частоты;
управление по схеме вентильного двигателя, представляющего собой двигатель постоянного тока, у которого механический коллектор заменен полупроводниковым коммутатором (управляемым инвертором); регулирование скорости обычно осуществляется за счет регулирования напряжения на входе инвертора.
Требования, предъявляемые к ИД. Характер требований, предъявляемых к ИД, определяется спецификой их работы в системах автоматики. Обычные требования, предъявляемые к двигателям вообще (прежде всего высокие энергетические показатели: КПД, coscp), смещаются у ИД на второй план.
Основные требования, предъявляемые к ИД:
отсутствие самохода (самоторможение двигателя при снятии сигнала управления);
устойчивость работы во всем диапазоне скоростей;
максимально возможная линейность механических и регулировочных характеристик;
большой пусковой момент;
высокое быстродействие, определяемое временем разгона двигателя до соответствующей данному сигналу скорости; быстродействие увеличивается с увеличением пускового момента и уменьшением момента инерции;
широкий диапазон регулирования скорости вращения;
малое напряжение трогания; надежность в работе.
В асинхронных ИД используется принцип регулирования скорости, который практически больше нигде не используется. Он заключается в изменении степени эллиптичности поля статора и соответствующем изменении соотношения между двигательным и тормозным режимами, одновременно возникающими в машине при эллиптическом поле.
Эллиптическое поле можно представить в виде наложения двух неодинаковых круговых полей, вращающихся в разные стороны с одной и той же скоростью, определяемой частотой питающих напряжений.
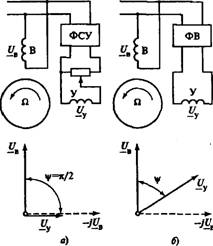
Рис. 3. Принципиальные схемы асинхронных исполнительных двигателей при амплитудном (а) и фазовом (б) управлении
По отношению к прямому полю (вращающемуся в ту же сторону, что и ротор) машина работает в двигательном режиме, по отношению к обратному — в тормозном. Работа двигателя при наличии обратного поля сопровождается большими дополнительными потерями. Поэтому используемый в АИД способ регулирования скорости неэкономичен и не может быть рекомендован для двигателей большой мощности.