Общие положения
Из выражения для скорости вращения трехфазного асинхронного двигателя, представленного в виде,
![]()
видны следующие принципиально возможные способы регулирования его скорости вращения:
- путем изменения числа оборотов вращающегося магнитного поля пи что, в свою очередь, возможно осуществить двумя путями: а) изменением частоты напряжения подводимого к статору двигателя, б) изменением числа полюсов обмотки статора;
- изменением скольжения двигателя s при данном числе оборотов вращающегося магнитного поля щ.
Следует иметь в виду, что у самовентилируемых двигателей при снижении скорости вращения ухудшаются условия охлаждения, и это необходимо учитывать при их нагрузке.
Рассмотрим, как практически может быть реализован каждый из этих способов.
Регулирование скорости вращения изменением частоты первичного напряжения (частотное регулирование)
Для этого способа регулирования скорости вращения необходим источник питания с регулируемой частотой. В установках малой и средней мощности им может быть синхронный генератор, работающий при
переменной скорости вращения, статический преобразователь частоты — ионный или полупроводниковый (транзисторный или тиристорный). Развитие полупроводниковых преобразователей делает этот источник переменной частоты все более перспективным. Необходимость в самостоятельном источнике питания двигателя, усложняя установку и повышая ее стоимость, ограничивает применение этого способа регулирования скорости вращения асинхронных двигателей.
При регулировании частоты необходимо стремиться к тому, чтобы избежать ухудшения характеристик двигателя. В большинстве случаев это достигается сохранением постоянства потока Ф, так как увеличение потока увеличивает насыщение магнитной цепи и намагничивающий ток, а уменьшение потока приводит к недоиспользованию машины, уменьшению перегрузочной способности и увеличению тока ротора /2 при требуемом значении момента М (182).
Пренебрегая относительно небольшим падением напряжения в обмотке статора, имеем![]()
Отсюда видно, что для сохранения значения потока неизменным одновременно с регулированием частоты необходимо изменять напряжение по закону U1=f 1. Это, вообще говоря, означает дальнейшее усложнение источника питания.
В случае, когда статический момент сопротивления рабочей машины заметно уменьшается с уменьшением скорости вращения (прежде всего это относится к центробежным машинам с так называемой вентиляторной характеристикой момента Мст=п2), энергетические показатели привода (cos ф1 и г|) улучшаются при более быстром уменьшении напряжения сравнительно с уменьшением частоты; наблюдаемое уменьшение максимального момента Мтах с учетом характера изменения статического момента сопротивления с позиций перегрузочной способности в этом случае можно считать вполне приемлемым.
Регулирование скорости вращения изменением числа полюсов обмотки статора

Рис. 174. Схемы одной фазы трехфазной обмотки с переключением числа полюсов: а — 2 р = 4; б — 2 р =2.
Этот способ позволяет изменять скорость вращения только ступенями. Статор должен иметь одну специальную обмотку, допускающую переключение ее на две схемы по числу полюсов, или две. Для первого случая наиболее выполнимое соотношение полюсов равно двум, его обычно и выбирают.
Каждая фаза обмотки с переключением числа пар полюсов в отношении 2:1 состоит из двух частей (полуобмоток фаз) с одинаковым количеством катушечных групп в каждой части. Используется обычно двухслойная обмотка. Для переключения изменяют направление тока в половине катушек (рис. 174). Переключаемые части обмоток (полуобмотки фаз) можно соединять параллельно и последовательно. Переключения выполняют одинаково во всех фазах и одновременно.
Сопоставляя однообмоточный двигатель с переключением числа полюсов с двигателем, на статоре которого уложены две обмотки, каждая на свое число полюсов, можно отметить, что во втором случае ухудшено использование машины, так как на каждой ступени к сети подключена только одна из обмоток, размещенных на статоре. В то же время у двигателя с двумя обмотками на статоре схема переключателя полюсов проще, чем у однообмоточного двухскоростного двигателя, особенно если отношение двух скоростей не равно 2.
Применяя две обмотки, каждая с переключением полюсов в отношении 1 :2, можно получить 4 ступени скорости. Если лишь одна обмотка выполнена допускающей переключение, будет получено 3 ступени скорости.
С числом ступеней больше 4 двигатели не выполняют. Практически регулирование переключением числа полюсов применяется в двигателях с короткозамкнутым ротором, так как в обмотке типа беличьего колеса число полюсов автоматически устанавливается равным числу полюсов вращающегося поля, и не требуется каких-либо переключений. В двигателе же с фазным ротором одновременно с изменением числа полюсов на статоре должно быть изменено и число полюсов фазной обмотки ротора. Усложнение обмотки наряду с необходимостью устройства дополнительных контактных колец на роторе значительно усложняет его конструкцию, такие двигатели применяются редко.
В качестве основных вариантов двигателя с переключением полюсов можно принять два, при которых двигатель на всех ступенях скорости вращения имеет или постоянный момент, или постоянную мощность.
Сложность проектирования многоскоростных двигателей состоит в том, что на всех ступенях насыщение магнитной системы, с одной стороны, не должно превышать допустимых пределов, с другой — не быть столь малым, чтобы заметно ухудшалось использование машины. Достаточно высокими должны быть обмоточные коэффициенты, коэффициент мощности, коэффициент полезного действия, перегрузочная способность, и, если необходимо, начальный пусковой момент, наконец, на каждой ступени скорости вращения должна быть установлена номинальная мощность по условиям нагрева машины с учетом того, что на разных ступенях меняются условия охлаждения. В таблице 7 указан ряд схем, наиболее полно удовлетворяющих требованиям этой многогранной задачи проектирования.
ТАБЛИЦА 7
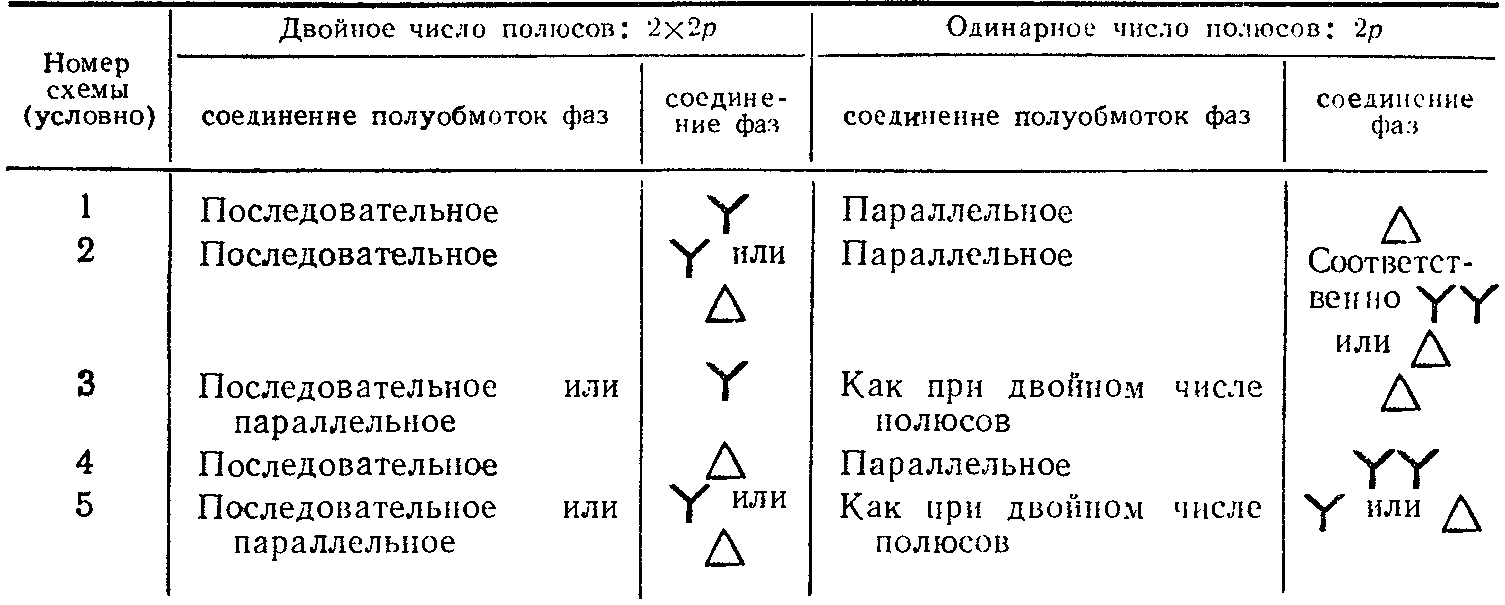
Среди указанных схема 1 (рис. 175, а) — единственная, в которой изменение момента согласуется с изменением скорости вращения в том смысле, что меньшей скорости соответствует меньший момент и наоборот. Эта схема рациональна для приводов вентиляторного типа.
В многоскоростных двигателях, спроектированных на базе серий А и А2, номинальная мощность на каждой ступени скорости вращения установлена по условиям допустимого превышения температуры обмотки статора и применена схема 4 таблицы 7 (рис. 175,б). При переключении скорости вращения условие постоянства момента или мощности не выдерживается, но на разных ступенях моменты отличаются друг от друга меньше, чем мощности. Поэтому двигатель с определенной степенью допущения можно рассматривать как двигатель с постоянным моментом.

Рис. 175. Схемы обмоток при переключении числа полюсов:
а — при двойном числе полюсов Y, при одинарном числе полюсов А; б —при двойном числе полюсов Д, при одинарном числе полюсов YY (двойная звезда).
Способ регулирования скорости вращения переключением числа полюсов широко применяется для короткозамкнутых двигателей. Достоинство его заключается в отсутствии потерь при регулировании, недостаток способа состоит в том, что регулирование ступенчатое при ограниченном числе ступеней.
Многоскоростные двигатели применяют в следующих случаях:
- если рабочий процесс рационально проводить на большей скорости, пуск и остановку механизма — на меньшей (например, подъемники). Здесь основная цель — останавливать без резких толчков массы, обладающие значительной инерцией;
- на установках с различными скоростями рабочего режима и холостого хода (например, лесопильные рамы);
- в установках, скорость которых желательно менять в зависимости от технологических факторов (металлорежущие и деревообрабатывающие станки, центробежные сепараторы, вентиляторы для животноводческих и птицеводческих помещений, землечерпалки).