ГЛАВА IV. ЛОКАЦИОННЫЕ МЕТОДЫ ОПРЕДЕЛЕНИЯ МЕСТ ПОВРЕЖДЕНИЯ
§ 19. НЕАВТОМАТИЧЕСКИЕ ЛОКАЦИОННЫЕ ИСКАТЕЛИ
Локационный метод определения расстояния известен в живой природе (летучие мыши, дельфины, киты) и широко используется в технике. В энергосистемах локационный метод используется для определения расстояния до места повреждения на линиях электропередачи. Он основан на измерении времени пробега искусственно создаваемого электрического зондирующего импульса от места подключения локатора до места повреждения и обратно. Время пробега Δt зондирующего импульса зависит от скорости ν распространения импульса и дальности I по выражению Δt= 2l/ν, из которого следует формула для ОМП локационным методом: Ζ=Δtν/2. Для воздушных линий электропередачи скорость νв.л=296 м/мкс, что несколько меньше, чем скорость света в вакууме из-за потерь энергии. Для кабельных линий, где потери большие, скорость распространения зондирующего импульса еще меньше νк.л=160 м/мкс. В зависимости от требований используют неавтоматические (НЛИ) и автоматические локационные искатели (АЛИ).

Структурная схема НЛИ приведена на рис. 17. Он состоит из генератора зондирующих импульсов ГИ, устройства синхронизации УС, устройства создания регулируемой задержки развертки изображения отраженного импульса на экране электронно-лучевой трубки ЭЛТ на время Δt. Подключение НЛИ к поврежденной фазе ВЛ осуществляется с использованием конденсатора С и дросселя L. Для обеспечения безопасности используется разрядник Р. Возможно подключение НЛИ к проводам ВЛ с использованием аппаратуры высокочастотной обработки ВЛ, в дальнейшем рассмотренной в § 20.
При включении прибора запускается устройство синхронизации УС, и НЛИ начинает совершать циклы зондирования. Частота повторения циклов зондирования не должна быть кратна 50 Гц для отстройки от промышленных регулярно повторяющих помех. На каждом цикле ГИ формирует электрический импульс. Через ключ Кл и конденсатор С этот импульс подается на провода ВЛ и начинает распространяться со скоростью vв.л вдоль линии электропередачи. Встречая на своем пути различного рода неоднородности, обрывы, КЗ, электрический импульс отражается и преломляется. Преломленная часть энергии импульса продолжает распространяться в прежнем направлении, а отраженная часть энергии импульса начинает распространяться от места повреждения в обратном направлении и через некоторое время достигает точки, где подключен НЛИ. Через конденсатор С и ключ Кл, который переведен в положение 2 сигналом УС, этот импульс воздействует на вертикальное
отклонение луча ЭЛТ по оси у. Развертка изображения на экране ЭЛТ начинается спустя ровно![]() после команды УС. Оператор, вращая ручки грубой и точной регулировки значения
после команды УС. Оператор, вращая ручки грубой и точной регулировки значения![]() , добивается совмещения изображения отраженного импульса с нулевой меткой, т. е. самым началом развертки(рис, 17). Очевидно, что при этом время пробега
, добивается совмещения изображения отраженного импульса с нулевой меткой, т. е. самым началом развертки(рис, 17). Очевидно, что при этом время пробега![]() . Зная скорость распространения электромагнитного импульса вдоль проводов линии и значение
. Зная скорость распространения электромагнитного импульса вдоль проводов линии и значение![]() , можно определить искомое расстояние до места повреждения с относительно высокой точностью (±1% диапазона дальности).
, можно определить искомое расстояние до места повреждения с относительно высокой точностью (±1% диапазона дальности).
Однако если скорость ν известна неточно, то расстояние будет определено с дополнительной погрешностью, превышающей 1%.
При использовании локационного метода имеется возможность калибровать ИЛИ в зависимости от фактической скорости ν, присущей именно поврежденной линии. Эта калибровка осуществляется по отраженному импульсу от конца ВЛ. Очевидно, что для калибровки нужно располагать данными о точной длине ВЛ.
§ 20. АВТОМАТИЧЕСКИЕ ЛОКАЦИОННЫЕ ИСКАТЕЛИ
Автоматические локационные искатели (АЛИ) обеспечивают измерение расстояния до места повреждения в период горения дуги КЗ. Поэтому АЛИ постоянно подключены к ВЛ, пускаются от релейной защиты, а время их действия не превышает 60—100 мс. Результат измерения АЛИ подлежит запоминанию. Функция памяти обеспечивает работу АЛИ как при устойчивых, так и при неустойчивых КЗ. Так как на ВЛ возможно повреждение любых фаз, то АЛИ подключается ко всем трем фазам через высоковольтные конденсаторы связи КС, обеспечивающие изоляцию аппаратуры АЛИ от высокого напряжения. Структурная схема автоматического локационного искателя дискретного действия типа ЛИДА и схема его подключения к проводам ВЛ приведена на рис. 18.
Пуск АЛИ осуществляется от релейной защиты ВЛ. После запуска АЛИ совершает п циклов зондирования, где n=8-16. Взаимодействие элементов АЛИ задается командными импульсами устройства управления УУ.
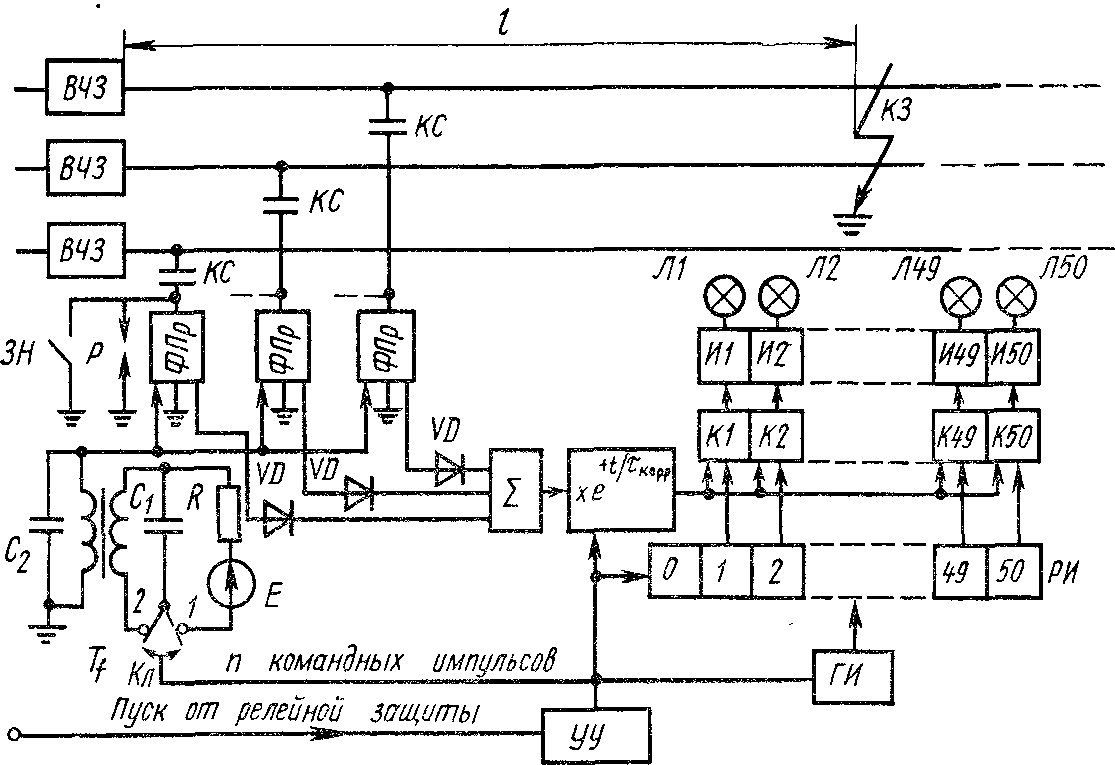
Рис. 18. Структура автоматического локационного искателя
Генератор зондирующих импульсов построен на базе колебательного контура, образованного частотозадающим конденсатором и вторичной обмоткой высокочастотного трансформатора Т1. Ударное возбуждение этого генератора происходит в момент переключения ключа Кл из первого положения во второе. При этом конденсатор C1, заряженный от источника с ЭДС Е и сопротивлением R, подключается к первичной обмотке трансформатора Tf, и в генераторе возникает зондирующий импульс. Через фильтры присоединения ФПр и КС этот импульс подается на провода ВЛ. Для того чтобы предотвратить рассеивание энергии импульса на элементах подстанции, в провода ВЛ врезаны высокочастотные заградители ВЧЗ. Элементы высокочастотной обработки ВЛ. ФПр, КС и ВЧЗ обеспечивают передачу зондирующего импульса от ГИ на провода ВЛ и его распространение вдоль трассы ВЛ.
Для обеспечения защиты от перенапряжения на ВЛ, а также обеспечения безопасности при производстве работ каждый из ФПр шунтируется разрядником Р и заземляющим ножом ЗН.
Как указывалось в § 19, в месте повреждения происходит отражение части энергии зондирующего импульса и возникает обратный импульс, который распространяется от места повреждения к месту установки АЛИ. Прием отраженного импульса в АЛИ осуществляется по всем трем фазам ВЛ. Дальнейшая обработка отраженных импульсов предусматривает их выпрямление в детекторах VD, суммирование в сумматоре Σ и умножение на увеличивающийся во времени коэффициент![]() в корректоре затухания. Запуск корректора затухания осуществляется от командных импульсов УУ. Принятый закон нарастания коэффициента усиления корректора обеспечивает одинаковый уровень сигнала при любом расстоянии до места КЗ при условии равенства постоянной времени корректора τкорр и постоянной времени τвл затухания энергии зондирующего импульса в ВЛ.
в корректоре затухания. Запуск корректора затухания осуществляется от командных импульсов УУ. Принятый закон нарастания коэффициента усиления корректора обеспечивает одинаковый уровень сигнала при любом расстоянии до места КЗ при условии равенства постоянной времени корректора τкорр и постоянной времени τвл затухания энергии зондирующего импульса в ВЛ.
Автоматические локационные искатели типа ЛИДА обеспечивают выдачу результата измерений в цифровой форме по номеру загоревшейся лампы индикации. Всего имеется 50 ламп (Л1—Л50), каждая из которых управляется запоминающей интегрирующей ячейкой, общее число которых тоже 50 (И1—И50). Запоминающие ячейки подключаются к выходу корректора затухания по очереди с помощью ключей (К1—К50). Очередность подключения ячеек обеспечивается распределителем импульсов РИ и генератором импульсов ГИ стабильной частоты. Запуск ГИ и РИ из нулевого положения осуществляется по командным импульсам от УУ.
Таким образом, в каждом цикле зондирования в каждой из запоминающих ячеек накапливаются отражения, соответствующие «своему» участку ВЛ. Длина каждого из таких участков равна 1/50 диапазона дальности АЛИ. В АЛИ типа ЛИДА предусмотрено пять диапазонов дальностей 75, 100, 150, 200 и 300 км.
После п циклов зондирования в запоминающей ячейке, на участке которой было КЗ, окажется наибольшее напряжение и загорится лампа индикации.
Многократное зондирование обеспечивает защиту от помех, так как импульсы помех на протяжении п циклов зондирования попадают в разные ячейки и не вызывают загорания ламп индикации.
Расстояние l оценивается дежурным оператором по номеру загоревшейся лампы.
К недостаткам АЛИ следует отнести их сложность, необходимость квалифицированного обслуживания, обязательное наличие высокочастотной обработки всех трех фаз ВЛ, необходимость выделения большой полосы частот высокочастотного канала связи,
§ 21. СОКРАЩЕНИЕ ТРУДОЗАТРАТ НА ОМП ПРИ ИСПОЛЬЗОВАНИИ ЛОКАЦИОННЫХ ИСКАТЕЛЕЙ
Использование ИЛИ возможно только при устойчивых КЗ. В этом случае показания НЛИ являются дополнительными по отношению к результату ОМП по показаниям ФП. В большинстве случаев показания НЛИ подтверждают и уточняют показания ФП. Однако в некоторых относительно редких случаях показания НЛИ не совпадают с результатом ОМП по показаниям ФП. В этом случае с помощью НЛИ стараются определить характер и вид повреждения. Если удается зафиксировать обрыв проводов ВЛ, то предпочтение отдается показаниям НЛИ, так как методика ОМП по показаниям ФП при обрывах проводов дает неверные результаты. Таким образом, НЛИ является важным резервным средством ОМП, которое в некоторых случаях обеспечивает радикальное сокращение времени ОМП при сложных видах устойчивых КЗ с обрывом фазных проводов и предотвращает безнадежные поиски в зоне обхода по показаниям ФП.
Использование АЛИ обеспечивает измерение расстояния при всех видах повреждений, в том числе и без «земли», когда фиксирующие амперметры и вольтметры нулевой последовательности не срабатывают. Еще одним достоинством АЛИ является быстрота получения конечного результата — значения расстояния до места КЗ. Недостатком АЛИ является сложность технического обслуживания.
Эффективность использования АЛИ существенно возрастает в случае, когда один АЛИ обслуживает несколько ВЛ. Автоматический локационный искатель типа ЛИДА может обслуживать до пяти ВЛ разных длин и напряжений одной подстанции. При возникновении КЗ на одной из них реализуется заранее выбранное и установленное число циклов зондирования на выбранном для поврежденной ВЛ диапазоне дальности и частоте зондирующих импульсов. При этом необходимо обеспечить подключение генератора зондирующих импульсов к ФПр именно поврежденной ВЛ. После запуска АЛИ блокируется до снятия показаний оператором.
§ 22. ПУТИ СОВЕРШЕНСТВОВАНИЯ ЛОКАЦИОННЫХ искателей
По основным техническим параметрам локационные искатели, разработанные в СССР, находятся на уровне лучших мировых образцов. Максимальная дальность достигает 300 км, относительная погрешность 1—2%, мощность зондирующего импульса АЛИ типа ЛИДА достигает 25 кВт.
Совершенствование ЛИ идет в следующих основных направлениях:
упрощение системы снятия показаний и отсчета расстояния до места повреждения;
увеличение разрешающей способности за счет уменьшения длительности зондирующих импульсов;
упрощение технического обслуживания и повышение надежности локационных искателей;
обеспечение возможности однократного зондирования благодаря применению микропроцессора и цифровой записи.
Контрольные вопросы
- Изложите принцип локационного метода ОМП.
- Как определяют результат измерения расстояния до места КЗ с помощью ИЛИ?
- Как определяют результат измерения расстояния до места КЗ с помощью АЛИ?
- Сколько циклов зондирования совершает НЛИ после включения?
- Сколько циклов зондирования совершает АЛИ после запуска?
- Как обеспечивается запоминание показаний АЛИ?
- Каким образом подключают НЛИ и АЛИ к проводам ВЛ?
- Можно ли определить место неустойчивого КЗ с помощью НЛИ?