Широкое распространение в различных отраслях народного хозяйства получили асинхронные двигатели трехфазного тока с короткозамкнутым ротором. Они не имеют скользящих контактов, просты по устройству и обслуживанию Двигатель с короткозамкнутым ротором в разобранном виде показан на рис. 1. Основными его частями являются статор и ротор. Сердечники статора и ротора набирают из листов электротехнической стали.
В пазах сердечника статора укладывают и закрепляют трехфазную обмотку В зависимости от напряжения питающей сети и данных двигателя ее соединяют звездой или треугольником. Выводы обмоток статора маркируют, благодаря этому облегчается сборка нужной схемы соединения.
В соответствии с ГОСТ 183—74* приняты следющие обозначения выводов обмоток отдельных фаз соответственно начало и конец первой фазы С1 и С4, второй — С2 и С5 и третьей — СЗ и С6 (рис 2). Расположение выводов на коробке контактных зажимов двигателя должно удовлетворять требованию простоты соединения обмоток по любой схеме Обмотку ротора от его сердечника не изолируют. Ее вместе с вентиляционными лопатками выполняют литой из алюминия или его сплавов. Стержни обмотки и накоротко замыкающие их кольца образуют так называемую беличью клетку.
Конструктивное выполнение двигателей зависит от способа вентиляции и степени защиты.
Асинхронные короткозамкнутые двигатели единой серии 4А по способу охлаждения и степени защиты персонала от соприкосновения с токоведущими или вращающимися частями, а также самой машины от попадания в нее посторонних тел имеют два исполнения (ГОСТ 14254—80): закрытое обдуваемое (обозначение IP44), защищенное (обозначение IP23).
Двигатели исполнения IP44 имеют аксиальную систему вентиляции. Воздух подается вентилятором и обдувает внешнюю оребренную поверхность станины.
Для двигателей IP23 характерна двусторонняя радиальная система вентиляции, которая осуществляется при помощи вентиляционных лопаток, расположенных на короткозамыкающих кольцах ротора.

Рис. 1 Асинхронный двигатель с короткозамкнутым ротором в разобранном виде
1 — статор, 2 — клеммная коробка, 3 —ротор 4 — подшипниковые щиты, 5 — вентилятор, 6 — кожух вентилятора
Двигатели этой серии имеют следующую структуру обозначений: 4 — порядковый номер серии; А — наименование вида двигателя — асинхронный; А — станина и щиты из алюминия; X — станина из алюминия и чугунные щиты; 56—355 — высота оси вращения; S, L, М — установочные размеры по длине корпуса; А, В — обозначение длины сердечника (первая длина — А, вторая—В); 2, 4, 6, 8, 10, 12 —число полюсов; У — климатическое исполнение двигателей; 3 — категория размещения. Например: 4АА56А2УЗ — электродвигатель серии 4, асинхронный, закрытого исполнения, станина и подшипниковые щиты из алюминия, с высотой оси вращения 56 мм, сердечник первой длины, двухполюсный, для районов умеренного климата, категории размещения 3.
Рис 2 Расположение выводов на щитке двигателя при соединении: а — звездой; б — треугольником
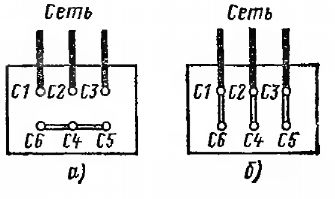
Таблица 1
Тип двигателя | Номинальная мощность, кВт | КПД, % | COS ф |
n = 3000 об/мин | |||
4А50А2УЗ | 0,09 | 60 | 0,7 |
4А50В2УЗ | 0,12 | 63 | 0,7 |
4АА56А2УЗ | 0,18 | 66 | 0,76 |
4АА56В2УЗ | 0,25 | 68 | 0,77 |
4АА63А2УЗ | 0,37 | 70 | 0,86 |
4АА63В2УЗ | 0,56 | 73 | 0,86 |
4А71А2УЗ | 0,75 | 77 | 0,87 |
4АХ71А2УЗ |
|
| |
4А71В2УЗ | 1,1 | 77,5 | 0,87 |
4АХ71В2УЗ |
|
| |
4А80А2УЗ | 1,5 | 81 | 0,85 |
4АХ80А2УЗ |
|
|
|
4А80В2УЗ | 2,2 | 83 | 0,87 |
4АХ80В2УЗ |
|
| |
4А902УЗ | 3 | 84,5 | 0,88 |
4АХ902УЗ |
|
| |
n = 1500 об/мин | |||
4А50А4УЗ | 0,06 | 50 | 0,6 |
4А50В4УЗ | 0,09 | 55 | 0,6 |
4АА56А4УЗ | 0,12 | 63 | 0,66 |
4АА56В4УЗ | 0,18 | 64 | 0,64 |
4АА63А4УЭ | 0,25 | 68 | 0,65 |
4АА63В4УЗ | 0,37 | 68 | 0,69 |
4А71В4УЗ | 0,55 | 70,5 | 0,7 |
4АХ71А4УЗ |
| ||
4А71В4УЗ | 0,75 | 72 | 0,73 |
4АХ71А4УЗ |
|
| 0,81 |
4А80А4УЗ | 1,1 | 75 | |
4АХ80А4УЗ |
|
|
|
4А80В4УЗ | 1,5 | 77 | 0,83 |
4АХ80А4УЗ |
|
| 0,83 |
4А904УЗ | 2,2 | 80 | |
4АХ904УЗ |
|
|
|
4А1004УЗ | 3 | 82 | 0,83 |
n = 1000 об/мин | |||
4АА6ЭА6УЗ | 0,18 | 56 | 0,62 |
4АА63В6УЗ | 0,26 | 59 | 0,62 |
4А716УЗ | 0,37 | 64,5 | 0,69 |
4АХ71А6УЗ |
| ||
4А71В6УЗ | 0,55 | 67,5 | 0,71 |
4АХ71В6УЗ | |||
Продолжение табл. 1
Тип двигателя | Номинальная мощность, кВт | КПД, % | cos ф |
4А80А6УЗ | 0,75 | 69 | 0,74 |
4АХ80А6УЗ |
|
| |
4А80В6УЗ | 1,1 | 74 | 0,74 |
4АХ80В6УЗ |
|
| |
4А906УЗ | 1,5 | 75 | 0,74 |
4АХ906УЗ |
|
| |
4А1006УЗ | 2,2 | 81 | 0,74 |
4А112МА6УЗ | 3 | 81 | 0,76 |
Основные технические данные двигателей небольшой мощности серии 4А приведены в табл. 1.
Разработана и выпускается единая серия асинхронных двигателей АИ. Улучшение энергетических, пусковых и виброшумовых характеристик машин этой серии достигается за счет применения новых материалов и конструктивных решений.
Основные технические данные двигателей небольшой мощности серии АИ приведены в табл. 2.
Трехфазный ток, проходя по обмоткам статора, создает вращающееся магнитное поле. Частота вращения поля n называется синхронной. Она зависит от частоты fi питающего напряжения и числа пар полюсов р машины:
и при f 1—50 Гц принимает значения: 3000 об/мин (р— ==1), 1500 об/мин (р=2), 1000 об/мин (р=3) и т. д.
Для частоты напряжения сети будем иметь:

Ротор асинхронного двигателя, вращаясь в направлении вращения поля, развивает частоту, несколько меньшую, чем синхронная, называемую асинхронной.
Таблица 2
Тип двигателя | Номинальная мощность, кВт | Синхронная частота вращения, об/ш<н | КПД, % | cos ф |
АИР71А2 | 0,75 | 3000 | 78,5 | 0,83 |
АИР71В2 | 1,1 |
| 79 | 0,83 |
АИР80А2 | 1,5 |
| 81 | 0,85 |
АИР80В2 | 2,2 |
| 83 | 0,87 |
AИP90L2 | 3 |
| 84,5 | 0,88 |
АИР71А4 | 0,55 | 1500 | 70,5 | 0,7 |
АИР71В4 | 0,76 1,1 |
| 73 | 0,73 |
АИР80А4 |
| 75 | 0,81 | |
АИР80В4 | 1,5 |
| 78 | 0,83 |
AИP90L4 | 2,2 |
| 81 | 0,83 |
AИP 100S4 | 3 |
| 82 | 0,83 |
АИР71А6 | 0,37 | 1000 | 65 | 0,66 |
АИР71В6 | 0,55 |
| 68,5 | 0,70 |
АИР80А6 | 0,75 |
| 70 | 0,72 |
АИР80В6 | 1,1 |
| 74 | 0,74 |
AИP90L6 | 1,5 |
| 76 | 0,72 |
AИP100L6 | 2,2 |
| 81 | 0,74 |
АИР80А2-ОМ2 | 1,5 | 3000 | 81 | 0,85 |
АИР80В20М2 | 2,2 |
| 83 | 0,87 |
АИР80А40М2 | 1500 | 75 | 0,81 | |
АИР80В4-ОМ2 | Г,5 |
| 78 | 0,83 |
АИР80А6-ОМ2 | 0,75 | 1000 | 70 | 0,72 |
АИР80В6-ОМ2 | 1,1 |
| 74 | 0,74 |
AHH90SA2 | 0,75 | 3000 | 77 | 0,8 |
AHH90SB2 | 1,1 |
| 79 | 0,82 |
AHH90SB4 | 0,75 | 1500 | 78 | 0,8 |
АИИ908В6 | 0,55 | 1000 | 76 | 0,68 |
AHH100S6 | 0,75 | 1000 | 78 | 0,73 |
AHH112S4 | 2,2 | 1500 | 84,5 | 0,84 |
AMM112S6 | 1000 | 82 | 0,76 |
Отставание ротора характеризуется скольжением s. Если частоту вращения ротора обозначить через ri2, то соотношение для скольжения примет вид
или, %,

Из (2) следует, что скольжение асинхронного двигателя изменяется от единицы (при пуске, когда п2—0) до нуля (при синхронной частоте вращения, т. е. когда П2—П1). Заметим, что точного равенства частоты вращения поля и ротора в двигательном режиме не достигается. Однако отставание ротора на холостом ходу машины так мало, что им можно пренебречь. Значения скольжений при полной нагрузке двигателя обычно составляют 4-6 %.
Выражение для частоты вращения ротора можно получить из соотношения (2):
Заметим, что числитель правой части равенства (2) имеет определенный физический смысл. Разность частоты вращения поля и ротора представляет собой относительную частоту вращения, т. е. частоту вращения поля относительно ротора ns, или частоту скольжения.
Пример. Известны «1 = 1000 об/мнн, s=4%. Вычислить частоту вращения ротора и относительную частоту вращения.
Имеем: ла= 1000(1—0,04) =960 об/мин, ns=nl—n2= 1000—960= =40 об/мин.
Частота ЭДС и токов, наводимых в обмотке ротора вращающимся магнитным полем, определяется частотой скольжения:
Путем несложных преобразований это выражение приводится к виду

т.е. частота ЭДС и токов ротора при условии ft — const пропорциональна скольжению.
Пример. Найти частоту тока ротора для предыдущего примера.
Имеем- /2=/lS=50-0,04=2 Гц.
Развиваемая двигателем мощность в пределах нормальных нагрузок пропорциональна скольжению. Поэтому о нагрузке машины можно судить по скольжению.
![]()

Использование мощности двигателя в процессе его эксплуатации может быть различным. Коэффициент использования мощности
![]()
где Рг — полезная мощность при произвольной нагрузке; Рном — номинальная мощность, т. е. полезная мощность, на которую рассчитана электрическая машина.
Номинальной мощности соответствует номинальное напряжение. Двигатель потребляет при этом номинальный ток, имея номинальные значения частоты вращения, мощности на валу, КПД и cos φ.
Назначение двигателя состоит в преобразовании электрической энергии в механическую. В процессе преобразования возникают потери. Они представляют ту часть активной мощности, которая расходуется на нагревание обмоток, стали сердечника статора и преодоление сил трения.
Отношение полезной мощности Р2, развиваемой двигателем на валу, к активной мощности Р\, потребляемой им из сети, называется коэффициентом полезного действия:
![]()
Кроме активной, двигатель потребляет реактивную намагничивающую мощность, необходимую для образования магнитного потока. Таким образом, полная мощность двигателя 5 состоит из активной и реактивной составляющих:

где Q — реактивная мощность двигателя.
Об относительном значении преобразованной мощности судят по коэффициенту мощности. Чем лучше используется мощность машины, тем выше коэффициент мощности. Для его вычисления достаточно активную мощность разделить на полную:

где U, I — фазные значения напряжения и тока.
Пример. На щитке трехфазного асинхронного двигателя с короткозамкнутым ротором имеются следующие обозначения: Д'А. 220/
380 В, 10,5/6,1 А, 2,8 кВт, 50 Гц, 2880 об/мин, КДД=81,5 %, cos<p= =0,86.
Из рассмотрения этих данных заключаем: номинальное напряжение фазы 220 В, номинальный фазный ток 6,1 А, полезная мощность />2=2,8 кВт, число пар полюсов р= 1. Так как синхронная частота вращения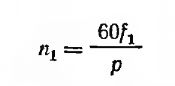
(в данном случае она равна 3000 об/мин), то скольжение при номинальной нагрузке составит:

Полная мощность двигателя при номинальной нагрузке SHom = 3l/ном /ном = 3-220-6,1 « 4000 В-А = 4 кВ-А.
Активная мощность, потребляемая двигателем при номинальной нагрузке,
Рхном = 31/ном /ном««Ф,ном = 3-220-6,1-0,86 = 3,44 кВт.
Потери в двигателе при номинальной нагрузке
2ДРиш = Ртш — Р2 = 3,44 — 2,8 = 0,64 кВт.
С использованием данных табл. 1 построены кривые зависимости коэффициента мощности двигателей от их номинальной мощности (рис. 3).
Кривая 1 соответствует синхронной частоте вращения 3000 об/мин, 2 — 1500 об/мин и 3— 1000 об/мин. Из рис. 3 видно, что коэффициент мощности асинхронного двигателя зависит от номинальной мощности и синхронной частоты вращения.
С увеличением мощности при постоянстве синхронной частоты вращения («!=const) уменьшается относительное значение воздушного зазора. Благодаря этому относительная реактивная намагничивающая мощность также уменьшается, а коэффициент мощности возрастает. К такому же результату приводит увеличение синхронной частоты вращения при постоянстве номинальной мощности двигателя. Скоростные машины имеют меньшие габариты, что обусловлено уменьшением вращающего момента, у них существенно уменьшается объем воздушного пространства между сердечниками статора и ротора.
Кривые зависимости удельной намагничивающей мощности двигателей от номинальной при — const показаны на рис. 4, откуда видно, что удельная намагничивающая мощность тем меньше, чем больше номинальная мощность двигателя и выше синхронная частота вращения.

Рис. 3 Кривые зависимости коэффициента мощности от номинальной мощности асинхронных двигателей при различных значениях синхронной частоты вращения:
1 — «1=3000 об/мин; 2-/2,-1500 об/ /мин; 3 — «1 = 1000 об/мин

Рис. 4. Кривые зависимости удельной намагничивающей мощности от номинальной мощности асинхронных двигателей при различных значениях синхронной частоты вращения:
1 — п,«>1000 об/мин; 2— «1-1500 об/мин; 3 — «1=3000 об/мин
Переход от зависимостей, приведенных на рис. 3, к зависимостям на рис. 4 производят с использованием следующих соотношений:
(7)
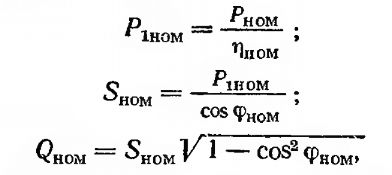
где Show, Qhom — полная и реактивная мощности двигателя при номинальной нагрузке.
Из сопоставления рис. 3 и 4 нетрудно сделать заключение о влиянии коэффициента мощности на энергетические показатели двигателей и питающей их системы: у двигателей с повышенным коэффициентом мощности при данной номинальной нагрузке (Рг=Рном) реактивная намагничивающая мощность меньше. Это приводит к уменьшению полной мощности и, соответственно, к уменьшению тока, потребляемого из сети.
В результате электрические потери в обмотках машины уменьшаются и ограничивается падение напряжения в проводах системы электроснабжения.